Ardupilot通过mavlink + 4way_protocol对BLHeli_s电调的读写
Ardupilot通过mavlink + 4way_protocol对BLHeli_s电调的读写
- 前言
- 上位机
- 1、Mission Planner
- 2、BLHeliSuite
- 3、BLHeliSuite32
- Ardupilot 源码编译
- 1、启动BLHeli_s支持
- 2、修改打印连接信息方式
- 3、编译源码
- 1、板子配置及编译
- 2、固件烧录
- 参数配置
- BL地面站连接
- 1、连接地面站
- 2、读取电调
- Ardupilot 对BLHeli_s 8位的操作不成功疑惑
- 1、8位地面站连接
- 2、尝试读取电调配置
- 3、查看Ardupilot 是否有对8位的读写接口
前言
当装机完成之后,发现电调与电机匹配不太好,或者转向相反,各种拆线很难受。BetaFlight飞控可支持通过信号线对BL电调进行读写,那么Ardupilot、PX4这两来源飞控系统呢? 答案是支持的,本文以Ardupilot为例记录我踩的坑以及对其不能连接8位BL电调的疑惑。
上位机
1、Mission Planner
Ardupilot地面站软件,本文使用它来对参数进行修改配置
2、BLHeliSuite
BLHeli_s 8位电调地面站,可以对8位电调进行读写
3、BLHeliSuite32
BLHeli_s 32位电调地面站,可以对32位电调进行读写
Ardupilot 源码编译
建议大家在最新的4.0版本上编译,我先是在4.0验证之后 转到3.6版本上使用的。
本文只从4.0版本进行说明。
1、启动BLHeli_s支持
在目录ardupilot/libraries/AP_HAL下的AP_HAL_Board.h文件中修改HAL_SUPPORT_RCOUT_SERIAL为1
#ifndef HAL_SUPPORT_RCOUT_SERIAL
#define HAL_SUPPORT_RCOUT_SERIAL 1
#endif
2、修改打印连接信息方式
默认会通过mavink发送连接信息到地面站,如果没有连接数传的时候,USB接口被BL地面站占用了,就无法在飞控地面站MP 查看连接信息,所以修改到debug接口打印出来,不过这就需要外接一个USB转TTL模块。
在AP_BLHeli.c文件中修改宏定义,然后在下面的debug 后面添加 \n 让其换行
// #define debug(fmt, args ...) do { if (debug_level) { gcs().send_text(MAV_SEVERITY_INFO, "ESC: " fmt, ## args); } } while (0)
#define debug(fmt, args ...) printf("ESC:" fmt, ## args)
例如
//debug("MSP_API_VERSION");
debug("MSP_API_VERSION\n");
3、编译源码
1、板子配置及编译
我使用的是Pixracer,可根据自己手上的飞控板进行对应的指令修改
./waf configure --board Pixracer //Pixracer就是飞控板的名称
./waf copter //多旋翼固件编译
2、固件烧录
./waf --targets bin/arducopter --upload
参数配置
SERVO_BLH_DEBUG 1 //需要修改 SERVO_BLH_DEBUG 使能对BL电调的连接
具体参数看图


BL地面站连接
1、连接地面站
直接通过USB连接飞控,打开BL地面站,选择连接方式为Betaflight/Cleanfight

找到对应的接口然后点击Connect 连接
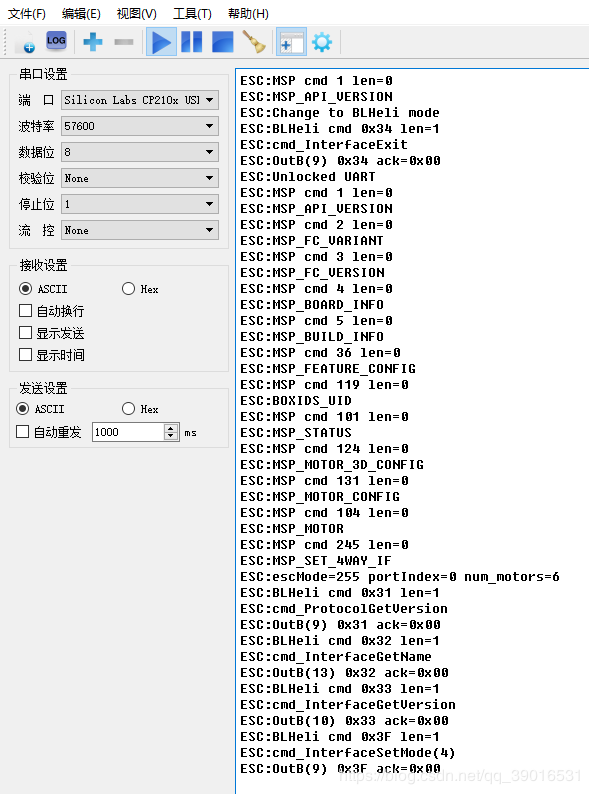
连接时 debug接口打印的信息如下:
2、读取电调
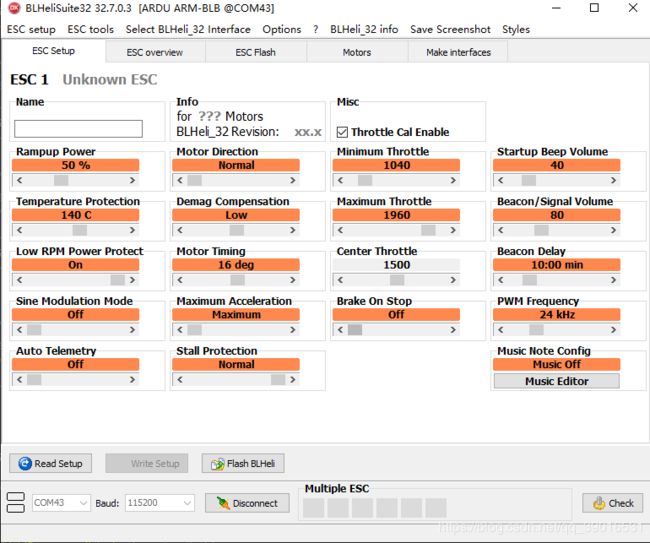
给电调上电,然后点击Read Setup

试着改个电机旋转方向写入测试:
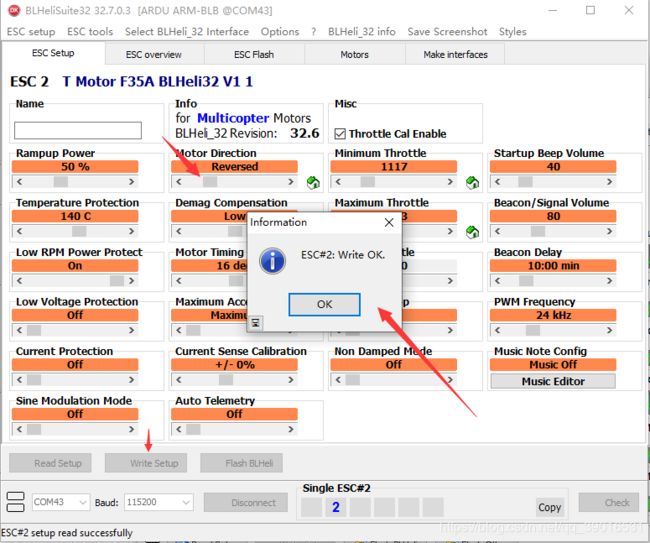
到这里,Ardupilot 对BLHeli_s 32位电调的直接读写宣布完成
Ardupilot 对BLHeli_s 8位的操作不成功疑惑
1、8位地面站连接
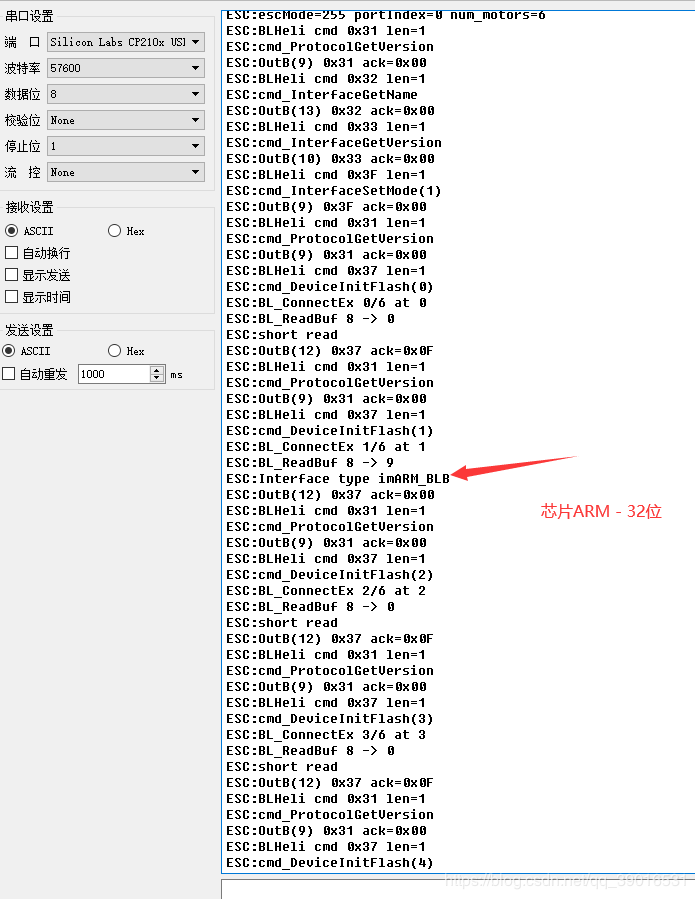
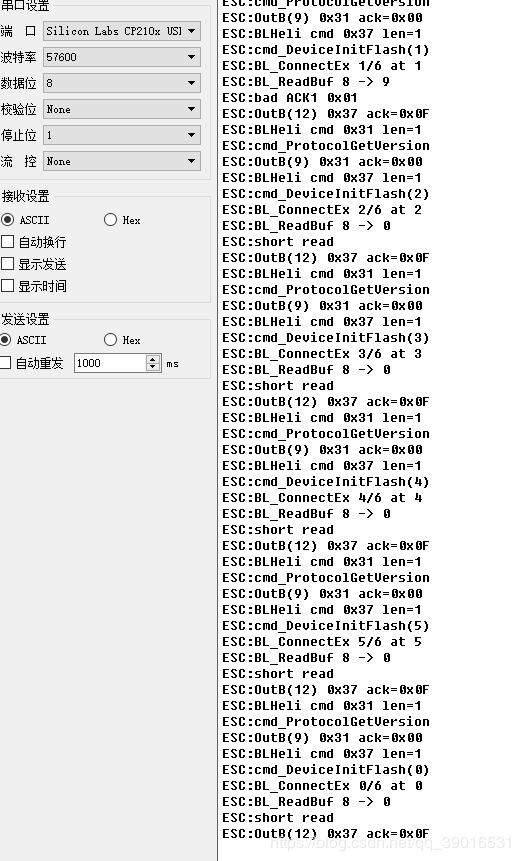
串口输出信息:

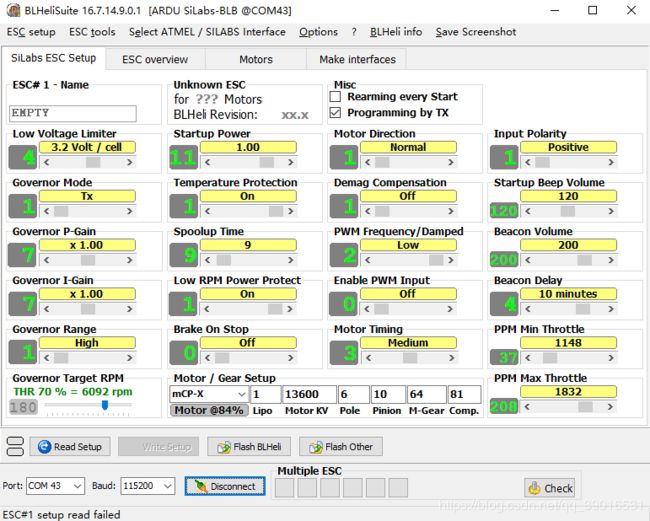
2、尝试读取电调配置
可读取到32位电调的信息:

但是BL地面站 只能对应的使用,8位的不能看32位的,所以使用8位电调再测试看看
正常连接至地面站


读取电调:发现了 多旋翼电调配置, 并且是SiLabs 主控的,但是 没能连接上
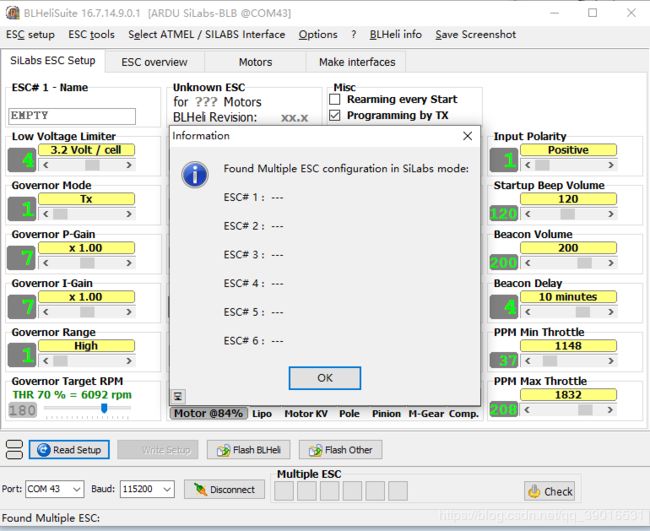
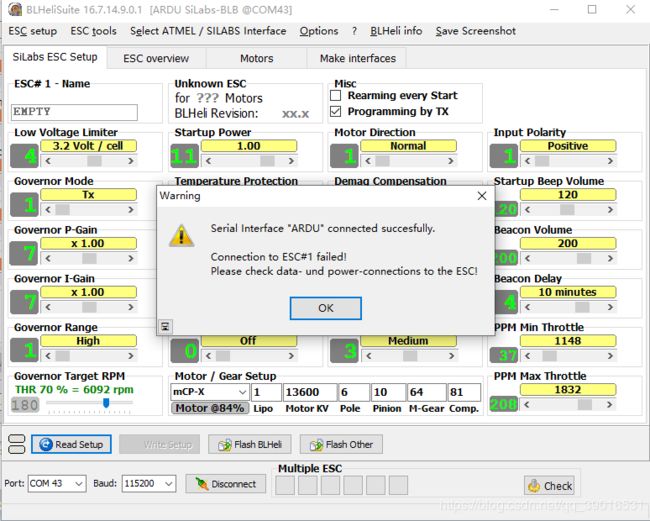
提示说需要给电调上电,问题是电源一直给的。
说明:地面站,8位32位 电调都经过Beatflight 飞控直连测试通过,肯定了电调没有问题
3、查看Ardupilot 是否有对8位的读写接口
在BL_ConnectEx(void)函数中,发现已存在对8位的支持,0xE8B1 0xE8B2就是对应的主控为EFM8BB10、EFM8BB21

/*
connect to a blheli ESC
*/
bool AP_BLHeli::BL_ConnectEx(void)
{
if (blheli.connected[blheli.chan] != 0) {
debug("Using cached interface 0x%x for %u\n", blheli.interface_mode[blheli.chan], blheli.chan);
return true;
}
debug("BL_ConnectEx %u/%u at %u\n", blheli.chan, num_motors, motor_map[blheli.chan]);
setDisconnected();
const uint8_t BootInit[] = {0,0,0,0,0,0,0,0,0,0,0,0,0x0D,'B','L','H','e','l','i',0xF4,0x7D};
if (!BL_SendBuf(BootInit, 21)) {
return false;
}
uint8_t BootInfo[8];
if (!BL_ReadBuf(BootInfo, 8)) {
return false;
}
// reply must start with 471
if (strncmp((const char *)BootInfo, "471", 3) != 0) {
blheli.ack = ACK_D_GENERAL_ERROR;
return false;
}
// extract device information
blheli.deviceInfo[blheli.chan][2] = BootInfo[3];
blheli.deviceInfo[blheli.chan][1] = BootInfo[4];
blheli.deviceInfo[blheli.chan][0] = BootInfo[5];
blheli.interface_mode[blheli.chan] = 0;
uint16_t *devword = (uint16_t *)blheli.deviceInfo[blheli.chan];
switch (*devword) {
case 0x9307:
case 0x930A:
case 0x930F:
case 0x940B:
blheli.interface_mode[blheli.chan] = imATM_BLB;
debug("Interface type imATM_BLB\n");
break;
case 0xF310:
case 0xF330:
case 0xF410:
case 0xF390:
case 0xF850:
case 0xE8B1:
case 0xE8B2:
blheli.interface_mode[blheli.chan] = imSIL_BLB;
debug("Interface type imSIL_BLB\n");
break;
case 0x1F06:
case 0x3306:
case 0x3406:
case 0x3506:
case 0x2B06:
case 0x4706:
blheli.interface_mode[blheli.chan] = imARM_BLB;
debug("Interface type imARM_BLB\n");
break;
default:
blheli.ack = ACK_D_GENERAL_ERROR;
debug("Unknown interface type 0x%04x", *devword);
break;
}
blheli.deviceInfo[blheli.chan][3] = blheli.interface_mode[blheli.chan];
if (blheli.interface_mode[blheli.chan] != 0) {
blheli.connected[blheli.chan] = true;
}
return true;
}
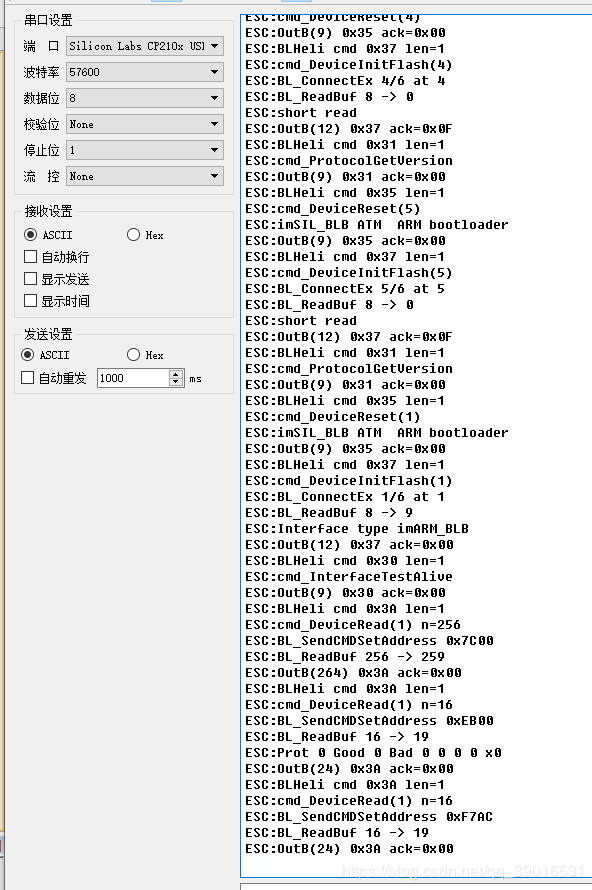
查看消息记录可以看到:查到的电机数为0


具体是将函数是void AP_BLHeli::blheli_process_command(void)
/*
process a blheli 4way command from GCS
*/
void AP_BLHeli::blheli_process_command(void)
{
debug("BLHeli cmd 0x%02x len=%u\n", blheli.command, blheli.param_len);
blheli.ack = ACK_OK;
switch (blheli.command) {
case cmd_InterfaceTestAlive: {
debug("cmd_InterfaceTestAlive\n");
BL_SendCMDKeepAlive();
if (blheli.ack != ACK_OK) {
setDisconnected();
}
uint8_t b = 0;
blheli_send_reply(&b, 1);
break;
}
case cmd_ProtocolGetVersion: {
debug("cmd_ProtocolGetVersion\n");
uint8_t buf[1];
buf[0] = SERIAL_4WAY_PROTOCOL_VER;
blheli_send_reply(buf, sizeof(buf));
break;
}
case cmd_InterfaceGetName: {
debug("cmd_InterfaceGetName\n");
uint8_t buf[5] = { 4, 'A', 'R', 'D', 'U' };
blheli_send_reply(buf, sizeof(buf));
break;
}
case cmd_InterfaceGetVersion: {
debug("cmd_InterfaceGetVersion\n");
uint8_t buf[2] = { SERIAL_4WAY_VERSION_HI, SERIAL_4WAY_VERSION_LO };
blheli_send_reply(buf, sizeof(buf));
break;
}
case cmd_InterfaceExit: {
debug("cmd_InterfaceExit\n");
msp.escMode = PROTOCOL_NONE;
uint8_t b = 0;
blheli_send_reply(&b, 1);
hal.rcout->serial_end();
serial_start_ms = 0;
if (motors_disabled) {
motors_disabled = false;
SRV_Channels::set_disabled_channel_mask(0);
}
if (uart_locked) {
debug("Unlocked UART\n");
uart->lock_port(0);
uart_locked = false;
}
memset(blheli.connected, 0, sizeof(blheli.connected));
break;
}
case cmd_DeviceReset: {
debug("cmd_DeviceReset(%u)\n", unsigned(blheli.buf[0]));
if (blheli.buf[0] >= num_motors) {
debug("bad reset channel %u\n", blheli.buf[0]);
blheli.ack = ACK_D_GENERAL_ERROR;
blheli_send_reply(&blheli.buf[0], 1);
break;
}
blheli.chan = blheli.buf[0];
switch (blheli.interface_mode[blheli.chan]) {
case imSIL_BLB:
case imATM_BLB:
case imARM_BLB:
debug("imSIL_BLB ATM ARM bootloader\n");
BL_SendCMDRunRestartBootloader();
break;
case imSK:
break;
}
blheli_send_reply(&blheli.chan, 1);
setDisconnected();
break;
}
case cmd_DeviceInitFlash: {
debug("cmd_DeviceInitFlash(%u)\n", unsigned(blheli.buf[0]));
if (blheli.buf[0] >= num_motors) {
debug("bad channel %u\n", blheli.buf[0]);
break;
}
blheli.chan = blheli.buf[0];
blheli.ack = ACK_OK;
BL_ConnectEx();
uint8_t buf[4] = {blheli.deviceInfo[blheli.chan][0],
blheli.deviceInfo[blheli.chan][1],
blheli.deviceInfo[blheli.chan][2],
blheli.deviceInfo[blheli.chan][3]}; // device ID
blheli_send_reply(buf, sizeof(buf));
break;
}
case cmd_InterfaceSetMode: {
debug("cmd_InterfaceSetMode(%u)\n", unsigned(blheli.buf[0]));
blheli.interface_mode[blheli.chan] = blheli.buf[0];
blheli_send_reply(&blheli.interface_mode[blheli.chan], 1);
break;
}
case cmd_DeviceRead: {
uint16_t nbytes = blheli.buf[0]?blheli.buf[0]:256;
debug("cmd_DeviceRead(%u) n=%u\n", blheli.chan, nbytes);
uint8_t buf[nbytes];
uint8_t cmd = blheli.interface_mode[blheli.chan]==imATM_BLB?CMD_READ_FLASH_ATM:CMD_READ_FLASH_SIL;
if (!BL_ReadA(cmd, buf, nbytes)) {
nbytes = 1;
}
blheli_send_reply(buf, nbytes);
break;
}
case cmd_DevicePageErase: {
uint8_t page = blheli.buf[0];
debug("cmd_DevicePageErase(%u) im=%u\n", page, blheli.interface_mode[blheli.chan]);
switch (blheli.interface_mode[blheli.chan]) {
case imSIL_BLB:
case imARM_BLB: {
if (blheli.interface_mode[blheli.chan] == imARM_BLB) {
// Address =Page * 1024
blheli.address = page << 10;
} else {
// Address =Page * 512
blheli.address = page << 9;
}
debug("ARM PageErase 0x%04x\n", blheli.address);
BL_PageErase();
blheli.address = 0;
blheli_send_reply(&page, 1);
break;
}
default:
blheli.ack = ACK_I_INVALID_CMD;
blheli_send_reply(&page, 1);
break;
}
break;
}
case cmd_DeviceWrite: {
uint16_t nbytes = blheli.param_len;
debug("cmd_DeviceWrite n=%u im=%u\n", nbytes, blheli.interface_mode[blheli.chan]);
uint8_t buf[nbytes];
memcpy(buf, blheli.buf, nbytes);
switch (blheli.interface_mode[blheli.chan]) {
case imSIL_BLB:
case imATM_BLB:
case imARM_BLB: {
BL_WriteFlash(buf, nbytes);
break;
}
case imSK: {
debug("Unsupported flash mode imSK\n");
break;
}
}
uint8_t b=0;
blheli_send_reply(&b, 1);
break;
}
case cmd_DeviceVerify: {
uint16_t nbytes = blheli.param_len;
debug("cmd_DeviceWrite n=%u im=%u\n", nbytes, blheli.interface_mode[blheli.chan]);
switch (blheli.interface_mode[blheli.chan]) {
case imARM_BLB: {
uint8_t buf[nbytes];
memcpy(buf, blheli.buf, nbytes);
BL_VerifyFlash(buf, nbytes);
break;
}
default:
blheli.ack = ACK_I_INVALID_CMD;
break;
}
uint8_t b=0;
blheli_send_reply(&b, 1);
break;
}
case cmd_DeviceReadEEprom: {
uint16_t nbytes = blheli.buf[0]?blheli.buf[0]:256;
uint8_t buf[nbytes];
debug("cmd_DeviceReadEEprom n=%u im=%u\n", nbytes, blheli.interface_mode[blheli.chan]);
switch (blheli.interface_mode[blheli.chan]) {
case imATM_BLB: {
if (!BL_ReadA(CMD_READ_EEPROM, buf, nbytes)) {
blheli.ack = ACK_D_GENERAL_ERROR;
}
break;
}
default:
blheli.ack = ACK_I_INVALID_CMD;
break;
}
if (blheli.ack != ACK_OK) {
nbytes = 1;
buf[0] = 0;
}
blheli_send_reply(buf, nbytes);
break;
}
case cmd_DeviceWriteEEprom: {
uint16_t nbytes = blheli.param_len;
uint8_t buf[nbytes];
memcpy(buf, blheli.buf, nbytes);
debug("cmd_DeviceWriteEEprom n=%u im=%u\n", nbytes, blheli.interface_mode[blheli.chan]);
switch (blheli.interface_mode[blheli.chan]) {
case imATM_BLB:
BL_WriteA(CMD_PROG_EEPROM, buf, nbytes, 1000);
break;
default:
blheli.ack = ACK_D_GENERAL_ERROR;
break;
}
uint8_t b = 0;
blheli_send_reply(&b, 1);
break;
}
case cmd_DeviceEraseAll:
case cmd_DeviceC2CK_LOW:
default:
// ack=unknown command
blheli.ack = ACK_I_INVALID_CMD;
debug("Unknown BLHeli protocol 0x%02x\n", blheli.command);
uint8_t b = 0;
blheli_send_reply(&b, 1);
break;
}
}
/*
process an input byte, return true if we have received a whole
packet with correct CRC
*/
bool AP_BLHeli::process_input(uint8_t b)
{
bool valid_packet = false;
if (msp.escMode == PROTOCOL_4WAY && blheli.state == BLHELI_IDLE && b == '$') {
debug("Change to MSP mode\n");
msp.escMode = PROTOCOL_NONE;
hal.rcout->serial_end();
serial_start_ms = 0;
}
if (msp.escMode != PROTOCOL_4WAY && msp.state == MSP_IDLE && b == '/') {
debug("Change to BLHeli mode\n");
memset(blheli.connected, 0, sizeof(blheli.connected));
msp.escMode = PROTOCOL_4WAY;
}
if (msp.escMode == PROTOCOL_4WAY) {
blheli_4way_process_byte(b);
} else {
msp_process_byte(b);
}
if (msp.escMode == PROTOCOL_4WAY) {
if (blheli.state == BLHELI_COMMAND_RECEIVED) {
valid_packet = true;
last_valid_ms = AP_HAL::millis();
if (uart->lock_port(BLHELI_UART_LOCK_KEY)) {
uart_locked = true;
}
blheli_process_command();
blheli.state = BLHELI_IDLE;
msp.state = MSP_IDLE;
}
} else if (msp.state == MSP_COMMAND_RECEIVED) {
if (msp.packetType == MSP_PACKET_COMMAND) {
valid_packet = true;
if (uart->lock_port(BLHELI_UART_LOCK_KEY)) {
uart_locked = true;
}
last_valid_ms = AP_HAL::millis();
msp_process_command();
}
msp.state = MSP_IDLE;
blheli.state = BLHELI_IDLE;
}
return valid_packet;
}
结合源码及debug消息初步分析是地面站点击读取的时候发的0x31后直接到0x37,导致前面的配置信息都没有获取到,所以就连接不上。但还存在疑惑的是 为什么32位电调可以顺利连接,8位电调的固件版本我从16.7慢慢降低到15版本也不行。
希望能在评论区得到大佬的解答,感激不尽!!!