北邮通信原理知识点笔记小结-下半部分
北邮通信原理知识点笔记小结-下半部分
文章目录
- 第四章 模拟通信
- 1.抽样定理
- 第五章 信道
- 1. 狭义信道与广义信道
- 2. 时变和恒参的区别
- 3. 调制信道/连续信道/模拟信道模型
- 4. 编码信道模型
- 5. 恒参信道特性及其对信号传输影响
- 第六章 数字基带信号
- 1.数字基带信号概述
- 2. 数字基信号的时域以及频域特征
- 3.传输码的主要特征
- 4. 基带脉冲传输与码间干扰
- 5. 无码间干扰的基带传输系统的抗噪声性能
- 6.部分响应系统
- 7. 时域均衡器
- 8. 匹配滤波器
- 第七章 数字调制信号
第四章 模拟通信
1.抽样定理
采样定理,又称香农采样定律、奈奎斯特采样定律,是信息论,特别是通讯与信号处理学科中的一个重要基本结论。
采样是将一个信号(即时间或空间上的连续函数)转换成一个数值序列(即时间或空间上的离散函数)。
采样过程所应遵循的规律,又称取样定理、抽样定理。采样定理说明采样频率与信号频谱之间的关系,是连续信号离散化的基本依据。
抽样定理:设时间连续信号f(t),其最高截至频率为fm,如果时间间隔为T<=1/2fm的开关信号对f(t)进行抽样时,则f(t)就可被样值信号唯一地表示。此条件也可以表示为:抽样频率fs>=2fh。
注意要点:
- 不是说通过抽样信号就是立马可以得到原信号,我们还需要对其进行滤波;
- 模拟信号 ->抽样-> 抽样信号 -> 低通滤波 -> 模拟信号 ,这个过程完成了信号的模-数转换和数-模转换过程;
原理解释:
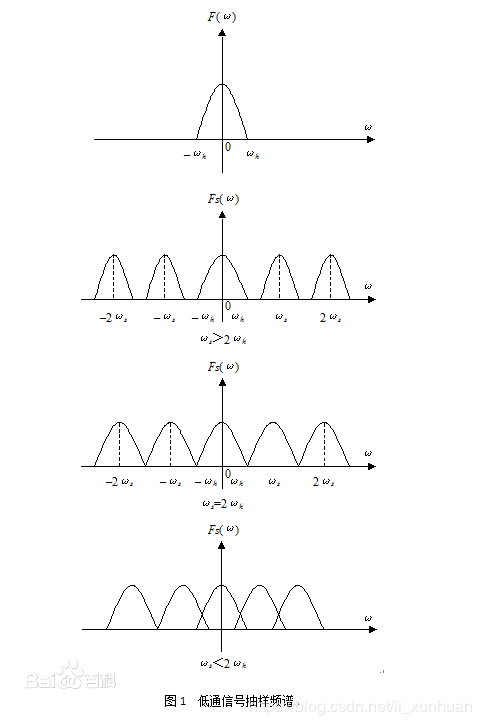
理想的抽样信号时域可以被表示为等时间间隔的单位冲击序列:
δ T ( t ) = ∑ k = − ∞ ∞ δ ( t − k T s ) \delta _ { T } ( t ) = \sum _ { k = - \infty } ^ { \infty } \delta \left( t - k T _ { s } \right) δT(t)=k=−∞∑∞δ(t−kTs)
其频域函数为:
F s ( ω ) = 1 T s ∑ k = − ∞ ∞ F ( ω − k ω s ) F _ { s } ( \omega ) = \frac { 1 } { T _ { s } } \sum _ { k = - \infty } ^ { \infty } F \left( \omega - k \omega _ { s } \right) Fs(ω)=Ts1k=−∞∑∞F(ω−kωs)
如果此理想抽样信号乘以时域模拟信号,那么可知,相当于对信号在频域中进行了等间隔的搬移,如下图所示:
第五章 信道
1. 狭义信道与广义信道
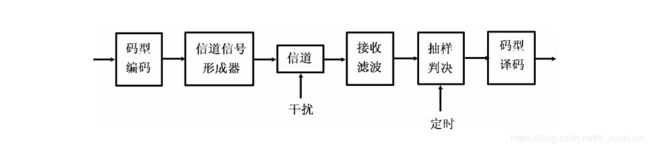
下图为常见的广义义通信系统框图:
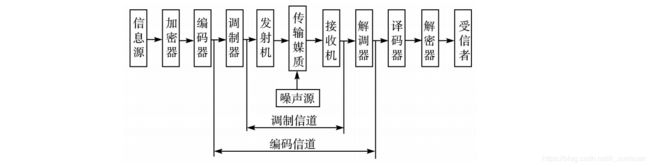
信息由消息表示,消息经济编码器、调制器、发射机等通信设备变换为信号,信号通过 传输媒质到达接收端,再经过接收机、解调器、译码器等通信设备反变换为消息,解出信息。
信号的传输媒质称为狭义信道。
如果除传输媒质外,还包括通信系统的某些设备,例如天线、收发信机、编译码器、调 制解调器等所构成的部份称为广义信道。由调制器、传输媒质、解调器组成的广义信道称为 编码信道;由发射机、天线、传输媒质、天线、接收机所组成的广义信道称为调制信道。
2. 时变和恒参的区别
如果信道模型的线性算子与时间无关(即为非时变线性算子),则信道称为恒参信道。 如果线性算子与时间有关(即为时变线性算子),则信道称为时变信道;如果线性算子随时间随机变化,则称信道为随参信道,从物理角度讲,恒参信道的特性不随时间变化;时变信道的特性随时间变化;随参信道的特性随时间随机变化。
3. 调制信道/连续信道/模拟信道模型
为了分析信道的性质及其对信号传输的影响,我们需要建立信道的数学模型。信道 的数学模型反映了信道的输出和输入之间的关系。
调制信道具有以下主要性质:
- 具有一对(或多对)输入和输出端。
- 大多数信道是线性的,即满足叠加原理。
- 信号经过信道会有延时,并还会受到固定的或时变的损耗。
- 当输入信号为 0 时,在信道的输出端仍有噪声输出。
根据上述性质,我们可用一个两端(或多端)时变线性网络来表示调制信道,如图所示:
 s o ( t ) = f 1 [ s 1 ( t ) ] + n ( t ) s _ { o } ( t ) = f _ { 1 } \left[ s _ { 1 } ( t ) \right] + n ( t ) so(t)=f1[s1(t)]+n(t)
s o ( t ) = f 1 [ s 1 ( t ) ] + n ( t ) s _ { o } ( t ) = f _ { 1 } \left[ s _ { 1 } ( t ) \right] + n ( t ) so(t)=f1[s1(t)]+n(t)
其中:ft[ ]为时变线性算子:n(t)为加性干扰
一般情况,调制信道可能有不止一个输入端(假设为 m 个)和不止一个输出端(假设为 n 个),这种调制信道的数学模型是一个多输入端和多输出端的时变线性网络,如下图所示:
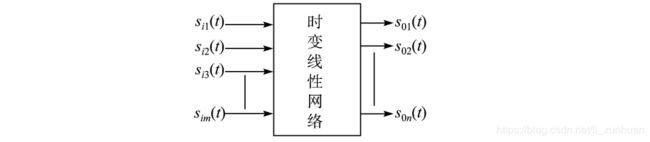 s o j ( t ) = f j l [ s i l ( t ) , s i a ( t ) , … s i m ( t ) ] + n j ( t ) j = 1 , 2 … n \begin{array} { c } { s _ { o j } ( t ) = f _ { j l } \left[ s _ { i l } ( t ) , s _ { i a } ( t ) , \ldots s _ { i m } ( t ) \right] + n _ { j } ( t ) } \\ { j = 1,2 \ldots n } \end{array} soj(t)=fjl[sil(t),sia(t),…sim(t)]+nj(t)j=1,2…n
s o j ( t ) = f j l [ s i l ( t ) , s i a ( t ) , … s i m ( t ) ] + n j ( t ) j = 1 , 2 … n \begin{array} { c } { s _ { o j } ( t ) = f _ { j l } \left[ s _ { i l } ( t ) , s _ { i a } ( t ) , \ldots s _ { i m } ( t ) \right] + n _ { j } ( t ) } \\ { j = 1,2 \ldots n } \end{array} soj(t)=fjl[sil(t),sia(t),…sim(t)]+nj(t)j=1,2…n
单输入单输出调制信道是最简单也是最基本的。调制信道的输入和输出信号都是模拟信 号(连续信号),所以调制信道在通信理论中称为连续信道或模拟信道。
4. 编码信道模型
编码信道的输入和输出都是数字序列(信号),因此在通信理论中称编码信道为离散信道或数字信道。编码信道的数学模型反映其输出数字序列和其输入数字序列之间的关系,通常是一种概率关系,用输入输出序列的转移概率描述。 下图是二进制数字传输系统的编 码信道模型,其中:
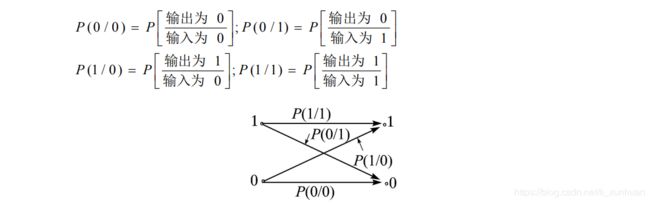
二进制编码信道模型可用转移概率矩阵表示:
 P 00 = P ( 0 / 0 ) ; P 01 = P ( 0 / 1 ) P 10 = P ( 1 / 0 ) ; P 11 = P ( 1 / 1 ) \begin{aligned} P _ { 00 } & = P ( 0 / 0 ) ; P _ { 01 } = P ( 0 / 1 ) \\ P _ { 10 } & = P ( 1 / 0 ) ; P _ { 11 } = P ( 1 / 1 ) \end{aligned} P00P10=P(0/0);P01=P(0/1)=P(1/0);P11=P(1/1)
P 00 = P ( 0 / 0 ) ; P 01 = P ( 0 / 1 ) P 10 = P ( 1 / 0 ) ; P 11 = P ( 1 / 1 ) \begin{aligned} P _ { 00 } & = P ( 0 / 0 ) ; P _ { 01 } = P ( 0 / 1 ) \\ P _ { 10 } & = P ( 1 / 0 ) ; P _ { 11 } = P ( 1 / 1 ) \end{aligned} P00P10=P(0/0);P01=P(0/1)=P(1/0);P11=P(1/1)
5. 恒参信道特性及其对信号传输影响
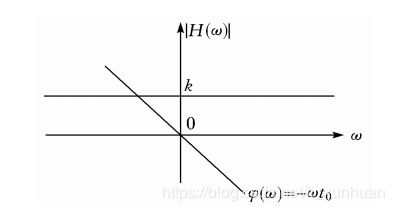
恒参信道可以看作是一个非时变线性网络。线性网络的特性是其单位冲激响应 h(t)(时 域)和传输特性 H(ω)(频域)。
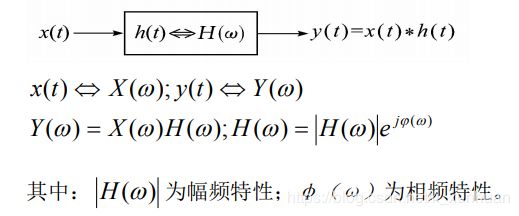
信号经过信道不失真的要求是:y(t)=kx(t—t0) ;其中:k,t0为常数。
h(t)=kδ(t—t0)
由此可得到满足信号经过信道不失真要求的 H(ω):
H ( ω ) = ∣ H ( ω ) ∣ e j φ ( ω ) = k e − j ω c 0 H ( \omega ) = | H ( \omega ) | e ^ { j \varphi ( \omega ) } = k ^ { e - j \omega c _ { 0 } } H(ω)=∣H(ω)∣ejφ(ω)=ke−jωc0
第六章 数字基带信号
1.数字基带信号概述
数字基带信号就是消息代码的电波形。
类型:矩形、升余弦、高斯形、半余弦脉冲。
介绍几种最基本的基带信号波形(矩形脉冲):
(1)单极性不归零
(2)双极性不归零
(3)单极性归零
(4)双极性归零波形
(5)差分波形:(相对码波形)
(6)多值波形(多电平波形)
数字基带信号的生成、传输、判决模型:
2. 数字基信号的时域以及频域特征
基带信号是一个随机脉冲序列。
随机脉冲序列可表示成:
S ( t ) = ∑ n = − ∞ ∞ s n ( t ) S n ( t ) = { g 1 ( t − n T s ) − − − − − P g 2 ( t − n T s ) − − − − − 1 − P \begin{array} { l } { S ( t ) = \sum _ { n = - \infty } ^ { \infty } s _ { n } ( t ) } \\ { S _ { n } ( t ) = \left\{ \begin{array} { l } { g _ { 1 } \left( t - n T _ { s } \right)-----P } \\ { g _ { 2 } \left( t - n T _ { s } \right)-----1-P } \end{array} \right.} \end{array} S(t)=∑n=−∞∞sn(t)Sn(t)={g1(t−nTs)−−−−−Pg2(t−nTs)−−−−−1−P
式中:Ts 为每一码元的宽度。 g1(t)、g2(t)是任意的脉冲,分别代表着数字信号0、1;
任一码元时间 g1(t), g2(t)出现的概率分别为 P 和 1-P,它们的出现是互不依赖的 (统计独立)。
介绍一种随机序列谱分析的典型方法,这是数字信号常见的频谱表示方式:
P s ( ω ) = f s P ( 1 − P ) ∣ G 1 ( f ) − G 2 ( f ) ∣ 2 + ∑ m = − ∞ ∞ f s [ P G 1 ( m f s ) + ( 1 − P ) G 2 ( m f s ) ] ∣ 2 \begin{aligned} P _ { s } ( \omega ) & = f _ { s } P ( 1 - \mathrm { P } ) \left| G _ { 1 } ( f ) - \mathrm { G } _ { 2 } ( f ) \right| ^ { 2 } \\ & + \left. \sum _ { m = - \infty } ^ { \infty } f _ { s } \left[ P G _ { 1 } \left( m f _ { s } \right) + ( 1 - P ) G _ { 2 } \left( m f _ { s } \right) \right] \right| ^ { 2 } \end{aligned} Ps(ω)=fsP(1−P)∣G1(f)−G2(f)∣2+m=−∞∑∞fs[PG1(mfs)+(1−P)G2(mfs)]∣∣∣∣∣2
结论:
(1)包括两个部分:连续谱及离散谱;
(2)连续谱总是存在;
(3)离散谱不总是存在;
(4)分析频谱的特点明确能否从脉冲序列中直接提取离散分量位同步、载波同步;
(5)g1(t)、g2(t)波形没有加以限定,故:此法同样可确定调制波形的功率谱密度;
另一种随机序列谱分析的方法 MPAM 的一般形式可表示为(这里我们从相关函数和功率谱关系的角度出发):
{an}广义平稳,以一定的概率取 M 个电平中的一个值。
P s ( f ) = F { R s ( τ ) } = 1 T s ∑ m = − ∞ + ∞ R a ( m ) ∫ − ∞ + ∞ R g ( τ − m T s ) e − j 2 π τ d τ = 1 T s ∑ m = − ∞ + ∞ R a ( m ) e − j 2 π f m T s ∫ − ∞ + ∞ R g ( τ − m T s ) e − j 2 π f ( τ − m T s ) d ( τ − m T s ) = 1 T s P a ( f ) ∣ G T ( f ) ∣ 2 \begin{aligned} P _ { s } ( f ) & = \mathrm { F } \left\{ R _ { s } ( \tau ) \right\} = \frac { 1 } { T _ { s } } \sum _ { m = - \infty } ^ { + \infty } R _ { a } ( m ) \int _ { - \infty } ^ { + \infty } R _ { g } \left( \tau - m T _ { s } \right) e ^ { - j 2 \pi } \tau d \tau \\ & = \frac { 1 } { T _ { s } } \sum _ { m = - \infty } ^ { + \infty } R _ { a } ( m ) e ^ { - j 2 \pi f m T _ { s } } \int _ { - \infty } ^ { + \infty } R _ { g } \left( \tau - m T _ { s } \right) e ^ { - j 2 \pi f ^ { \left( \tau - m T _ { s } \right) } } d \left( \tau - m T _ { s } \right) \\ & = \frac { 1 } { T _ { s } } P _ { a } ( f ) \left| G _ { T } ( f ) \right| ^ { 2 } \end{aligned} Ps(f)=F{Rs(τ)}=Ts1m=−∞∑+∞Ra(m)∫−∞+∞Rg(τ−mTs)e−j2πτdτ=Ts1m=−∞∑+∞Ra(m)e−j2πfmTs∫−∞+∞Rg(τ−mTs)e−j2πf(τ−mTs)d(τ−mTs)=Ts1Pa(f)∣GT(f)∣2
广义平稳随机过程{an}在各符号之间独立的条件下发送的 MPAM 信号的 PSD 为:
信号通过一个系统后的输出功率谱为原信号乘以此系统函数的模的平方:
P a ( f ) = ∑ m = − ∞ + ∞ R a ( m ) e − j 2 π f m T s P s ( f ) = 1 T s P a ( f ) ∣ G T ( f ) ∣ 2 = σ 2 a T s ∣ G T ( f ) ∣ 2 + m a 2 T s 2 ∑ m = − ∞ + ∞ ∣ G T ( m T s ) ∣ 2 δ ( f − m T s ) \begin{array} { l } {P_{a}(f) = \sum _ { m = - \infty } ^ { + \infty } R _ { a } ( m ) e ^ { - j 2 \pi f m T _ { s } } } \\ { P _ { s } ( f ) = \frac { 1 } { T _ { s } } P _ { a } ( f ) \left| G _ { T } ( f ) \right| ^ { 2 } } \\ { = \frac { \sigma ^ { 2 } a } { T _ { s } } \left| G _ { T } ( f ) \right| ^ { 2 } + \frac { m _ { a } ^ { 2 } } { T _ { s } ^ { 2 } } \sum _ { m = - \infty } ^ { + \infty } \left| G _ { T } \left( \frac { m } { T _ { s } } \right) \right| ^ { 2 } \delta \left( f - \frac { m } { T _ { s } } \right) } \end{array} Pa(f)=∑m=−∞+∞Ra(m)e−j2πfmTsPs(f)=Ts1Pa(f)∣GT(f)∣2=Tsσ2a∣GT(f)∣2+Ts2ma2∑m=−∞+∞∣∣∣GT(Tsm)∣∣∣2δ(f−Tsm)
3.传输码的主要特征
(1)能从其相应的基带信号中获取定时信息。
(2)相应的基带信号无直流或有很小的低频成分。
(3)不受信息源统计特性的影响。
(4)尽可能地提高传输码型的传输效率。
(5)具有内在的检错能力。
4. 基带脉冲传输与码间干扰
基带信号的传输模型:
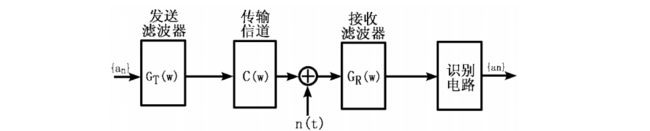
系统函数为:
H(ω)=GT(ω)C(ω)GR(ω)
我们设接收端判决前的信号r(t)可以表示为如下:
r ( t ) = ∑ a n δ ( t − n T s ) ∗ h ( t ) + n ( t ) = ∑ a n h ( t − n T s ) + n ( t ) r(t)=\sum a_{n} \delta\left(t-n T_{s}\right) * h(t)+n(t)=\sum a_{n} h\left(t-n T_{s}\right)+n(t) r(t)=∑anδ(t−nTs)∗h(t)+n(t)=∑anh(t−nTs)+n(t)
其中Ts为码元宽度、n代表第n个码元,而n(t)仍代表噪声。
在数字信号中,在获取了数字信号的单个码元宽度之后,有: 第 K 个码元的判决,由第 K 次抽样决定,那么第k次抽象的信号r(kTs)可以表示为:
r ( k T s ) = ∑ n = − ∞ ∞ a n h ( k T s − n T s ) + n ( k T s ) = a k h ( 0 ) + ∑ a n h [ ( k − n ) T s ] + n ( k T s ) \begin{aligned} r\left(k T_{s}\right) &=\sum_{n=-\infty}^{\infty} a_{n} h\left(k T_{s}-n T_{s}\right)+n(kT_{s}) \\ &=a_{k} h(0)+\sum a_{n} h\left[(k-n) T_{s}\right]+n\left(k T_{s}\right) \end{aligned} r(kTs)=n=−∞∑∞anh(kTs−nTs)+n(kTs)=akh(0)+∑anh[(k−n)Ts]+n(kTs)
其中有,akh(0)为我们所需要的第k个码片的抽样,但是由于其乘以了h(0),所以可能会有传输失真。
∑ n ≠ k a n h [ ( k − n ) T s ] \sum_{n≠k} a_{n} h[(k-n)T_{s}] n=k∑anh[(k−n)Ts]
上式则是被我们称为码间干扰。
n(kTs)则是噪声在第k次抽样时刻的取值。
我们假设上述的基带信号传输模型是二进制,若要进行判决,则需要使用二分法进行判断,如果r(kTs)大于某个值,就判决其为1,否则判决为0,模型如下:
设门限为V:
-
r(kTs)>V------ak=1
-
r(kTs)
如果要求判决值尽可能仅仅只和akh(0)有关,那么我们起码要求:码间干扰及噪声需要足够小。
无码见干扰的条件:
要求:
∑ n ≠ k a n h [ ( k − n ) T s ] = 0 \sum_{n≠k} a_{n} h[(k-n)T_{s}]=0 n=k∑anh[(k−n)Ts]=0
首先这个式子可以是整体和恰好为0,但由于an作为一个随机取值的信号,这样的建模十分复杂。所以我们简化模型,整体和为 0 的一个特殊情况就是和的每项值都取值为0,这样一来问题就简化为以下模型:
h ( k T s ) = { 1 − − − k = 0 0 − − − k ≠ 0 , k 为 整 数 h\left(k T_{s}\right)=\left\{\begin{array}{l}{1---k=0} \\ {0---k \neq 0, k为整数}\end{array}\right. h(kTs)={1−−−k=00−−−k=0,k为整数
满足此 h(kTs)H(ω)可用付氏变换求得。 ——抽样点上无码间干扰,Nypuist 第一准则。
下面将时域信号经过反傅里叶变换,用频域信号表示,有:
h ( t ) = 1 2 π ∫ − ∞ ∞ H ( ω ) e j a x d ω h ( k T s ) = 1 2 π ∫ − ∞ ∞ H ( ω ) e j a t T s d ω \begin{array}{c}{h(t)=\frac{1}{2 \pi} \int_{-\infty}^{\infty} H(\omega) e^{j a x} d \omega} \\ {h\left(k T_{s}\right)=\frac{1}{2 \pi} \int_{-\infty}^{\infty} H(\omega) e^{j a t T_{s}} d \omega}\end{array} h(t)=2π1∫−∞∞H(ω)ejaxdωh(kTs)=2π1∫−∞∞H(ω)ejatTsdω
∑ i H ( ω + 2 π i T s ) = T s ∣ ω ∣ ≤ π T s H e q ( ω ) = { ∑ i H ( ω + 2 π i T s ) = T s − − ∣ ω ∣ ≤ π T s 0 − − − − − − − − − − − ∣ ω ∣ ≥ π T s \begin{array}{l}{\sum_{i} H\left(\omega+\frac{2 \pi i}{T_{s}}\right)=T_{s} \quad|\omega| \leq \frac{\pi}{T_{s}}} \\ {\qquad H_{e q}(\omega)=\left\{\begin{array}{ll}{\sum_{i} H\left(\omega+\frac{2 \pi i}{T_{s}}\right)=T_{s}--|\omega| \leq \frac{\pi}{T_{s}}} \\ {0-----------|\omega|} {\geq \frac{\pi}{T_{s}}}\end{array}\right.}\end{array} ∑iH(ω+Ts2πi)=Ts∣ω∣≤TsπHeq(ω)={∑iH(ω+Ts2πi)=Ts−−∣ω∣≤Tsπ0−−−−−−−−−−−∣ω∣≥Tsπ
上式就是无码见干扰的基带传输系统的频域条件。
Nyquist 第一准则的物理意义:
H(ω)用间隔 2π/Ts 分割后,在区间(-π/Ts,π/Ts)上能否叠加出一根水平直线(即为某常数,比如上式中的Ts),为某常数既是符合无码间干扰条件的。满足此条件的 H(ω)有不少,下面给出常见的例子:
1.理想低通型(即频域的门信号)
频域为门信号,那么时域即为Sa函数,如下图所示:
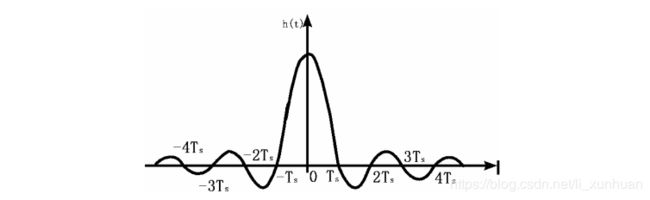
无码间干扰时最高的码元速率: 1/Ts(注意,时域h(t)间越紧凑,码元速率越快)。
此时频域中门信号的宽度为1/Ts,带宽为1/2Ts,所以最高频带利用率为:
R B ( B ) B ( H z ) = 2 \frac{R_{B}(B)}{B\left(H_{z}\right)}=2 B(Hz)RB(B)=2
系统无码间干扰时最高传输速率为 2w(波特) 这个传输速率-----称为奈斯特速率。理想低通滤波特性达到了系统有效性能的极限,可是这种特性是无法实现的,这是因为我们无法在频域完美地截断出一个门信号。
2. 实际的滤波器(实际的码元频域波形)
实际上把 H(ω)按间隔 2π/Ts的宽度分割成三段,只要这三段在区间(-π/Ts,π/Ts) 上能叠加出理想滤波特性来,则 H(ω)也能消除码间干扰。下图表示了分割及叠加的过程:
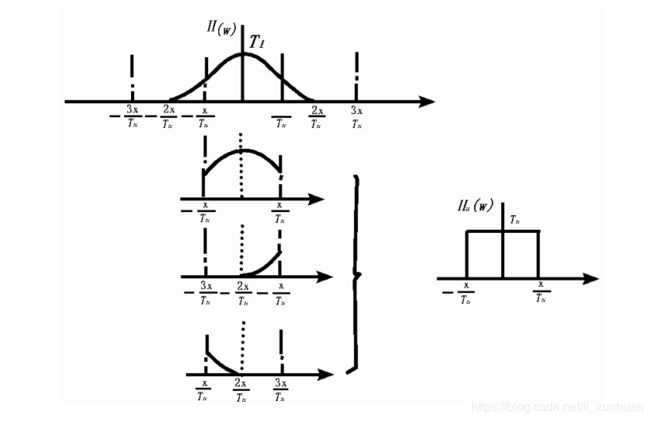
定义滚降系统数: α =W2/W1
上述类型的频域信号被称为升余弦滚降信号。
W1是无滚降时的截止频率。 W2为滚降部分的截止频率。
采用具有升余频谱特性的 H(ω)可用下式表示:
H ( ω ) = { T s , − − − − − − − − − − − − − − 0 ≤ ∣ ω ∣ < ( 1 − a ) π T s T s 2 [ 1 + sin T s 2 a ( π T s − ω ) ] , − − ( 1 − a ) π T s ≤ ∣ ω ∣ < ( 1 + a ) π T s 0 , − − − − − − − − − − − − − − − − − − − − − − − − ∣ ω ∣ ≥ ( 1 + a ) π T s H(\omega)=\left\{\begin{array}{l}{T_{s},--------------0 \leq|\omega|<\frac{(1-a) \pi}{T_{s}}} \\ {\frac{T_{s}}{2}\left[1+\sin \frac{T_{s}}{2 a}\left(\frac{\pi}{T_{s}}-\omega\right)\right],--\frac{(1-a) \pi}{T_{s}} \leq|\omega|<\frac{(1+a) \pi}{T_{s}}} \\ {0,------------------------|\omega| \geq \frac{(1+a) \pi}{T_{s}}}\end{array}\right. H(ω)=⎩⎪⎪⎨⎪⎪⎧Ts,−−−−−−−−−−−−−−0≤∣ω∣<Ts(1−a)π2Ts[1+sin2aTs(Tsπ−ω)],−−Ts(1−a)π≤∣ω∣<Ts(1+a)π0,−−−−−−−−−−−−−−−−−−−−−−−−∣ω∣≥Ts(1+a)π
h ( t ) = sin π t / T s π t / T s ⋅ cos π t / T s 1 − 4 a 2 t 2 / T s 2 \mathrm{h}(\mathrm{t})=\frac{\sin \pi t / T_{s}}{\pi t / T_{s}} \cdot \frac{\cos \pi t / T_{s}}{1-4 a^{2} t^{2} / T_{s}^{2}} h(t)=πt/Tssinπt/Ts⋅1−4a2t2/Ts2cosπt/Ts
5. 无码间干扰的基带传输系统的抗噪声性能
无码间干扰情况下的判决实际上非常简单,可以简化为以下模型:
抽点:信号+噪声:
x(t)= ±A+nR(t)-------其中正负号对应着0、1数字信号的电平。
f 1 x = 1 2 π σ n e − ( x − A ) 2 2 σ n 2 {f_{1} x=\frac{1}{\sqrt{2 \pi \sigma_{n}}} e^{-\frac{(x-A)^{2}}{2 \sigma_{n}^{2}}}} f1x=2πσn1e−2σn2(x−A)2
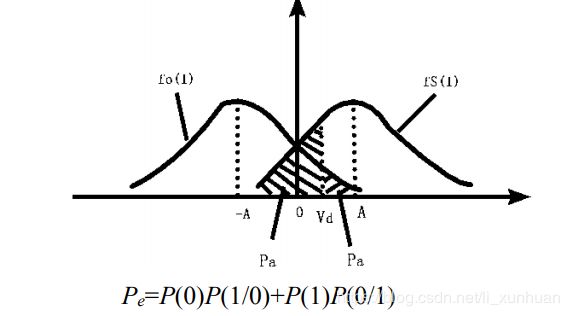
Pe代表误码率,误码率实际上使用高斯分布的积分就能算出来,当0、1等概时,误码率可以化简为:
P e = 1 2 P ( 1 / 0 ) + 1 2 P ( 0 / 1 ) = 1 2 erfc ( A 2 σ n ) P_{e}=\frac{1}{2} P(1 / 0)+\frac{1}{2} P(0 / 1)=\frac{1}{2} \operatorname{erfc}\left(\frac{A}{\sqrt{2 \sigma_{n}}}\right) Pe=21P(1/0)+21P(0/1)=21erfc(2σnA)
6.部分响应系统
思想:
- 有控制地在某些码元的抽样时刻引入码间干扰,而在其余码元 的抽样时刻无码间干扰。
- 能使频带利用率提高到理论上的最大值,又可以降低对定时精度的要求。
利用部分响应波形进行传送的基带传输系统称为部分响应系统。
部分响应系统:有码间干扰,频带利用率与理想低通系统相同,不满足 Nyquist 第一准则。
干扰—“干扰是确定的。
在此处就不详细阐述如何控制可以确定的码间干扰。
7. 时域均衡器
定义:
在基带系统中插入一种可调(也可不调)滤波器能减小码间干扰的影响,这种起补偿的滤波器均衡器被称为时域均衡器。
分类:
- 频域均衡器: 利用可调滤波器的频率特性去补偿基带系统的频率特性,使包括可调滤波器在内的基带系统的总特性满足要求。
- 时域均衡器: 利用波形补偿的方法将畸变的波形加以校正,使校正后的波形畸变最小。
具体的函数在此不展开了(公式太费时间了~)。
8. 匹配滤波器
引用于:知乎-刘梳子通原
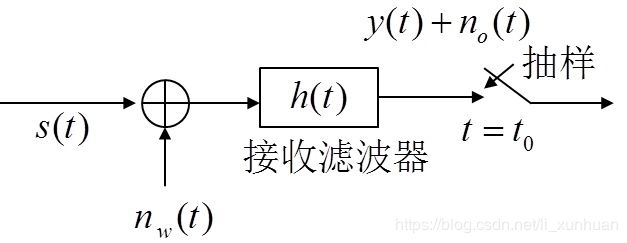
上图是一个常见的信号接收端的模型。一个信号的完整程度的衡量不单单和信号自身的功率有关,更科学的方式是使用抽样时刻的信噪比来度量完整性。
假设nw(t)为加性高斯白噪声,其功率谱取值大小恒为N0/2,那么其经过滤波器的输出功率为(N0/2为常数可以提出):
P n o = E [ n o 2 ( t ) ] = N 0 2 ∫ − ∞ ∞ ∣ h ( t ) ∣ 2 d t = N 0 2 E h P_{n_{o}}=E\left[n_{o}^{2}(t)\right]=\frac{N_{0}}{2} \int_{-\infty}^{\infty}|h(t)|^{2} d t=\frac{N_{0}}{2} E_{h} Pno=E[no2(t)]=2N0∫−∞∞∣h(t)∣2dt=2N0Eh
那么信号部分在抽样时刻的幅值则为s(t)经h(t)卷积后在抽样时刻t的值:
y ( t ) = s ( t ) ∗ h ( t ) = ∫ − ∞ ∞ h ( τ ) s ( t − τ ) d τ y ( t 0 ) = ∫ − ∞ ∞ h ( τ ) s ( t 0 − τ ) d τ \begin{array}{l}{y(t)=s(t) * h(t)=\int_{-\infty}^{\infty} h(\tau) s(t-\tau) d \tau} \\ {y\left(t_{0}\right)=\int_{-\infty}^{\infty} h(\tau) s\left(t_{0}-\tau\right) d \tau}\end{array} y(t)=s(t)∗h(t)=∫−∞∞h(τ)s(t−τ)dτy(t0)=∫−∞∞h(τ)s(t0−τ)dτ
那么抽样时刻信号的信噪比就可以表示为:
γ o = ∣ y ( t 0 ) ∣ 2 P n 0 = [ ∫ − ∞ ∞ h ( τ ) s ( t 0 − τ ) d τ ] 2 P n 0 ≤ [ ∫ − ∞ ∞ h ( τ ) d τ ] 2 [ ∫ − ∞ ∞ s ( t 0 − τ ) d τ ] 2 P n 0 \gamma_{o}=\frac{\left|y\left(t_{0}\right)\right|^{2}}{P_{n_{0}}}=\frac{\left[\int_{-\infty}^{\infty} h(\tau) s\left(t_{0}-\tau\right) d \tau\right]^{2}}{P_{n_{0}}} \leq \frac{\left[\int_{-\infty}^{\infty} h(\tau) d \tau\right]^{2}\left[\int_{-\infty}^{\infty} s\left(t_{0}-\tau\right) d \tau\right]^{2}}{P_{n_{0}}} γo=Pn0∣y(t0)∣2=Pn0[∫−∞∞h(τ)s(t0−τ)dτ]2≤Pn0[∫−∞∞h(τ)dτ]2[∫−∞∞s(t0−τ)dτ]2
根据柯西不等式可知,想让左式能取等于右式,需要有
h ( t ) = K s ( t 0 − t ) ; H ( f ) = K S ∗ ( f ) e − j 2 π f 0 t 0 h(t)=K s\left(t_{0}-t\right) ; H(f)=K S^{*}(f) e^{-j 2 \pi f_{0} t_{0}} h(t)=Ks(t0−t);H(f)=KS∗(f)e−j2πf0t0
上式中tto可见可以有无数个取值,但是为了满足因果性最小,一般t0取s(t)码元宽度T。
此时输出信号的大小为:
y ( t ) = s ( t ) ∗ h ( t ) = s ( t ) ∗ K s ( T − t ) = K ∫ − ∞ ∞ s ( T − t + τ ) s ( τ ) d τ = K R s ( t − T ) y ( T ) = K ∫ 0 T S 2 ( τ ) d τ \begin{array}{l}{y(t)=s(t)^{*} h(t)=s(t) * K s(T-t)=K \int_{-\infty}^{\infty} s(T-t+\tau) s(\tau) d \tau=K R_{s}(t-T)} \\ {y(T)=K \int_{0}^{T} S^{2}(\tau) d \tau}\end{array} y(t)=s(t)∗h(t)=s(t)∗Ks(T−t)=K∫−∞∞s(T−t+τ)s(τ)dτ=KRs(t−T)y(T)=K∫0TS2(τ)dτ
可见,使用匹配滤波器的情况下,滤波器端输出信号相当于其输入信号自相关的延迟,且有在t=T时刻取到最大值。
在满足上面要求的情况下,对于一个码元,我们在抽样时刻 T 时抽样有:
y ( t ) = ∫ 0 t [ s ( τ ) + n w ( τ ) ] s ( τ ) d τ = ∫ 0 t s 2 ( τ ) d τ + ∫ 0 t n w ( τ ) s ( τ ) d τ y ( T ) = ∫ 0 T s 2 ( τ ) d τ + ∫ 0 T n w ( τ ) s ( τ ) d τ = E s + Z \begin{aligned} y(t) &=\int_{0}^{t}\left[s(\tau)+n_{w}(\tau)\right] s(\tau) d \tau \\ &=\int_{0}^{t} s^{2}(\tau) d \tau+\int_{0}^{t} n_{w}(\tau) s(\tau) d \tau \\ y(T) &=\int_{0}^{T} s^{2}(\tau) d \tau+\int_{0}^{T} n_{w}(\tau) s(\tau) d \tau = E_{s}+Z \end{aligned} y(t)y(T)=∫0t[s(τ)+nw(τ)]s(τ)dτ=∫0ts2(τ)dτ+∫0tnw(τ)s(τ)dτ=∫0Ts2(τ)dτ+∫0Tnw(τ)s(τ)dτ=Es+Z
匹配滤波器不能等效成相关器的情况:
发送信号波形没有限制在一个符号发送间隔的时候,匹配滤波器不能等效成相关器。
第七章 数字调制信号
数字调制和模拟调制在本质上是相同地,都是利用基带信号对载波波形的某些参量进行控制,使载波的这些参量随基带信号变化。
数字调制系统:正弦波作为载波,载波参量随基带信号幅度、频率和相位变化 ——调幅(ASK)、调频(FSK)和调相(PSK、DPSK)。
数字信号于模拟信号都有在调制上类似的性质,比如模拟信号的频谱从基带搬移至频带、数字信号的功率谱从基带搬移至频带。