Android-Framework:Sensor框架Framework层解读
Sensor整体架构

整体架构说明
- 黄色部分表示硬件,它要挂在I2C总线上
- 红色部分表示驱动,驱动注册到Kernel的Input Subsystem上,然后通过Event Device把Sensor数据传到HAL层,准确说是HAL从Event读
- 绿色部分表示动态库,它封装了整个Sensor的IPC机制,如SensorManager是客户端,SensorService是服务端,而HAL部分是封装了服务端对Kernel的直接访问
- 蓝色部分就是我们的Framework和Application了,JNI负责访问Sensor的客户端,而Application就是具体的应用程序,用来接收Sensor返回的数据,并处理实现对应的UI效果,如屏幕旋转,打电话时灭屏,自动调接背光(这三个功能的具体实现会在以后分析)
Sensor总体调用关系图
本节主要解读Android的Framework层框架。

Sensor 框架分为三个层次,客户度、服务端、HAL层,服务端负责从HAL读取数据,并将数据写到管道中,客户端通过管道读取服务端数据。
客户端主要类
SensorManager.java
从android4.1开始,把SensorManager定义为一个抽象类,定义了一些主要的方法,该类主要是应用层直接使用的类,提供给应用层的接口
SystemSensorManager.java
继承于SensorManager,客户端消息处理的实体,应用程序通过获取其实例,并注册监听接口,获取sensor数据。
sensorEventListener接口
用于注册监听的接口
sensorThread
是SystemSensorManager的一个内部类,开启一个新线程负责读取读取sensor数据,当注册了sensorEventListener接口的时候才会启动线程
android_hardware_SensorManager.cpp
负责与java层通信的JNI接口
SensorManager.cpp
sensor在Native层的客户端,负责与服务端SensorService.cpp的通信
SenorEventQueue.cpp
消息队列
服务端主要类
SensorService.cpp
服务端数据处理中心
SensorEventConnection
从BnSensorEventConnection继承来,实现接口ISensorEventConnection的一些方法,ISensorEventConnection在SensorEventQueue会保存一个指针,指向调用服务接口创建的SensorEventConnection对象
Bittube.cpp
在这个类中创建了管道,用于服务端与客户端读写数据
SensorDevice
负责与HAL读取数据
HAL层
Sensor.h是google为Sensor定义的Hal接口,单独提出去
客户端读取数据
调用时序图

apk注册监听器


SensorManager mSensorManager =
(SensorManager)getSystemService(SENSOR_SERVICE);
Sensor mAccelerometer =
mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
protected void onResume() {
super.onResume();
mSensorManager. registerListenerImpl (this, mAccelerometer,
SensorManager.SENSOR_DELAY_NORMAL);
}
protected void onPause() {
super.onPause();
mSensorManager.unregisterListener(this);
}
public interface SensorEventListener {
public void onSensorChanged(SensorEvent event);
public void onAccuracyChanged(Sensor sensor, int accuracy);
}
Activity实现了SensorEventListener接口。
在onCreate方法中,获取SystemSensorManager,并获取到加速传感器的Sensor;
在onResume方法中调用SystemSensorManager,registerListenerImpl注册监听器;
当Sensor数据有改变的时候将会回调onSensorChanged方法。
初始化SystemSensorManager
public SystemSensorManager(Context context,Looper mainLooper) {
mMainLooper = mainLooper;
mContext = context;
synchronized(sListeners) {
if (!sSensorModuleInitialized) {
sSensorModuleInitialized = true;
nativeClassInit();
// initialize the sensor list
sensors_module_init();
final ArrayList fullList = sFullSensorsList;
int i = 0;
do {
Sensor sensor = new Sensor();
i = sensors_module_get_next_sensor(sensor, i);
if (i>=0) {
//Log.d(TAG, "found sensor: " + sensor.getName() +
// ", handle=" + sensor.getHandle());
fullList.add(sensor);
sHandleToSensor.append(sensor.getHandle(), sensor);
}
} while (i>0);
sPool = new SensorEventPool( sFullSensorsList.size()*2 );
sSensorThread = new SensorThread();
}
}
}
系统开机启动的时候,会创建SystemSensorManager的实例,在其构造函数中,主要做了四件事情:
- 初始化JNI:调用JNI函数nativeClassInit()进行初始化
- 初始化Sensor列表:调用JNI函数sensors_module_init,对Sensor模块进行初始化。创建了native层SensorManager的实例。
- 获取Sensor列表:调用JNI函数sensors_module_get_next_sensor()获取Sensor,并存在sHandleToSensor列表中
- 构造SensorThread类:构造线程的类函数,并没有启动线程,当有应用注册的时候才会启动线程
启动SensorThread线程读取消息队列中数据
protected boolean registerListenerImpl(SensorEventListener listener, Sensor sensor,
int delay, Handler handler) {
synchronized (sListeners) {
ListenerDelegate l = null;
for (ListenerDelegate i : sListeners) {
if (i.getListener() == listener) {
l = i;
}
}
…….
// if we don't find it, add it to the list
if (l == null) {
l = new ListenerDelegate(listener, sensor, handler);
sListeners.add(l);
……
if (sSensorThread.startLocked()) {
if (!enableSensorLocked(sensor, delay)) {
…….
}
……
} else if (!l.hasSensor(sensor)) {
l.addSensor(sensor);
if (!enableSensorLocked(sensor, delay)) {
……
}
}
}
return result;
}
当有应用程序调用registerListenerImpl()方法注册监听的时候,会调用SensorThread.startLoacked()启动线程。
线程只会启动一次,并调用enableSensorLocked()接口对指定的sensor使能,并设置采样时间。
SensorThreadRunnable实现了Runnable接口,在SensorThread类中被启动
boolean startLocked() {
try {
if (mThread == null) {
SensorThreadRunnable runnable = new SensorThreadRunnable();
Thread thread = new Thread(runnable, SensorThread.class.getName());
thread.start();
synchronized (runnable) { //队列创建成功,线程同步
while (mSensorsReady == false) {
runnable.wait();
}
}
}
private class SensorThreadRunnable implements Runnable {
SensorThreadRunnable() {
}
private boolean open() {
sQueue = sensors_create_queue();
return true;
}
public void run() {
…….
if (!open()) {
return;
}
synchronized (this) {
mSensorsReady = true;
this.notify();
}
while (true) {
final int sensor = sensors_data_poll(sQueue, values, status, timestamp);
…….
}
}
}
在open函数中调用JNI函数sensors_create_queue()来创建消息队列,然后调用SensorManager. createEventQueue()创建。
在startLocked函数中启动新的线程后,做了一个while的等待while (mSensorsReady == false),只有当mSensorsReady等于true的时候,才会执行enableSensorLocked()函数对sensor使能。而mSensorsReady变量,是在open()调用创建消息队列成功之后才会true,所以认为,三个功能调用顺序是如下:
- 调用open函数创建消息队列
- 调用enableSensorLocked()函数对sensor使能
- 调用sensors_data_poll从消息队列中读取数据,而且是在while (true)循环里一直读取
服务端实现
调用时序图
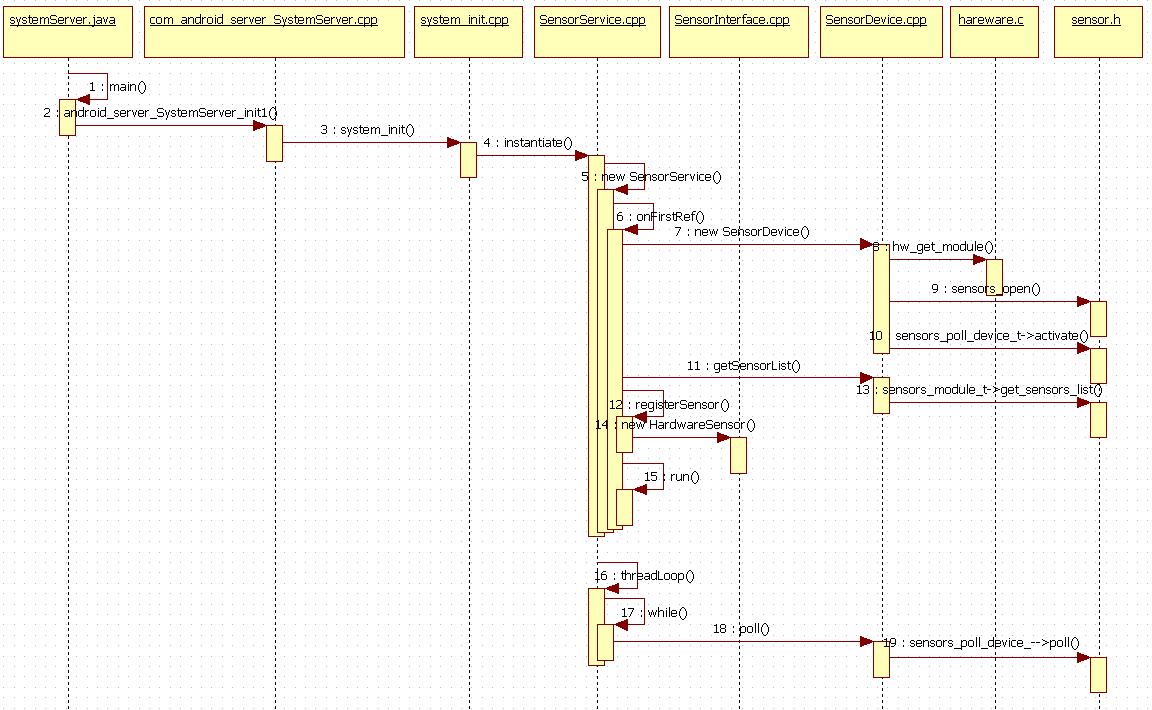
启动SensorService服务
在SystemServer进程中的main函数中,通过JNI调用,调用到com_android_server_SystemServer.cpp的android_server_SystemServer_init1()方法,该方法又调用system_init.cpp中的system_init():
extern "C" status_t system_init()
{
……
property_get("system_init.startsensorservice", propBuf, "1");
if (strcmp(propBuf, "1") == 0) {
// Start the sensor service
SensorService::instantiate();
}
…..
return NO_ERROR;
}
在这里创建了SensorService的实例。
SensorService初始化
SensorService创建完之后,将会调用SensorService::onFirstRef()方法,在该方法中完成初始化工作。
首先获取SensorDevice实例,在其构造函数中,完成了对Sensor模块HAL的初始化:
SensorDevice::SensorDevice()
: mSensorDevice(0),
mSensorModule(0)
{
status_t err = hw_get_module(SENSORS_HARDWARE_MODULE_ID,
(hw_module_t const**)&mSensorModule);
if (mSensorModule) {
err = sensors_open(&mSensorModule->common, &mSensorDevice);
ALOGE_IF(err, "couldn't open device for module %s (%s)",
SENSORS_HARDWARE_MODULE_ID, strerror(-err));
if (mSensorDevice) {
sensor_t const* list;
ssize_t count = mSensorModule->get_sensors_list(mSensorModule, &list);
mActivationCount.setCapacity(count);
Info model;
for (size_t i=0 ; iactivate(mSensorDevice, list[i].handle, 0);
}
}
}
}
这里主要做了三个工作:
- 调用HAL层的hw_get_modele()方法,加载Sensor模块so文件
- 调用sensor.h的sensors_open方法打开设备
- 调用sensors_poll_device_t->activate()对Sensor模块使能
再看看SensorService::onFirstRef()方法:
void SensorService::onFirstRef()
{
SensorDevice& dev(SensorDevice::getInstance());
if (dev.initCheck() == NO_ERROR) {
sensor_t const* list;
ssize_t count = dev.getSensorList(&list);
if (count > 0) {
……
for (ssize_t i=0 ; i
在这个方法中,主要做了4件事情:
- 创建SensorDevice实例
- 获取Sensor列表
- 调用SensorDevice.getSensorList(),获取Sensor模块所有传感器列表
- 为每个传感器注册监听器
registerSensor( new HardwareSensor(list[i]) );
void SensorService::registerSensor(SensorInterface* s)
{
sensors_event_t event;
memset(&event, 0, sizeof(event));
const Sensor sensor(s->getSensor());
// 添加到Sensor列表,给客户端使用
mSensorList.add(sensor);
// add to our handle->SensorInterface mapping
mSensorMap.add(sensor.getHandle(), s);
// create an entry in the mLastEventSeen array
mLastEventSeen.add(sensor.getHandle(), event);
}
HardwareSensor实现了SensorInterface接口。
- 启动线程读取数据
调用run方法启动新线程,将调用SensorService::threadLoop()方法。
在新的线程中读取HAL层数据
SensorService实现了Thread类,当在onFirstRef中调用run方法后,将在新的线程中调用SensorService::threadLoop()方法。
bool SensorService::threadLoop()
{
……
do {
count = device.poll(buffer, numEventMax);
recordLastValue(buffer, count);
……
// send our events to clients...
const SortedVector< wp > activeConnections(
getActiveConnections());
size_t numConnections = activeConnections.size();
for (size_t i=0 ; i connection(
activeConnections[i].promote());
if (connection != 0) {
connection->sendEvents(buffer, count, scratch);
}
}
} while (count >= 0 || Thread::exitPending());
return false;
}
在while循环中一直读取HAL层数据,再调用SensorEventConnection->sendEvents将数据写到管道中。
客户端与服务端通信
数据传送
客户端与服务端通信的状态图:

客户端服务端线程
在图中可以看到有两个线程:
-
- 一个是服务端的一个线程,这个线程负责源源不断的从HAL读取数据。
- 另一个是客户端的一个线程,客户端线程负责从消息队列中读数据。
创建消息队列
客户端可以创建多个消息队列,一个消息队列对应有一个与服务器通信的连接接口
创建连接接口
服务端与客户端沟通的桥梁,服务端读取到HAL层数据后,会扫面有多少个与客户端连接的接口,然后往每个接口的管道中写数据
创建管道
每一个连接接口都有对应的一个管道。
上面是设计者设计数据传送的原理,但是目前Android4.1上面的数据传送不能完全按照上面的理解。
因为在实际使用中,消息队列只会创建一个,也就是说客户端与服务端之间的通信只有一个连接接口,只有一个管道传数据。
那么数据的形式是怎么从HAL层传到JAVA层的呢?
其实数据是以一个结构体sensors_event_t的形式从HAL层传到JNI层。看看HAL的sensors_event_t结构体:
typedef struct sensors_event_t {
int32_t version;
int32_t sensor; //标识符
int32_t type; //传感器类型
int32_t reserved0;
int64_t timestamp; //时间戳
union {
float data[16];
sensors_vec_t acceleration; //加速度
sensors_vec_t magnetic; //磁矢量
sensors_vec_t orientation; //方向
sensors_vec_t gyro; //陀螺仪
float temperature; //温度
float distance; //距离
float light; //光照
float pressure; //压力
float relative_humidity; //相对湿度
};
uint32_t reserved1[4];
} sensors_event_t;
在JNI层有一个ASensorEvent结构体与sensors_event_t向对应,frameworks/native/include/android/sensor.h:
typedef struct ASensorEvent {
int32_t version;
int32_t sensor;
int32_t type;
int32_t reserved0;
int64_t timestamp;
union {
float data[16];
ASensorVector vector;
ASensorVector acceleration;
ASensorVector magnetic;
float temperature;
float distance;
float light;
float pressure;
};
int32_t reserved1[4];
} ASensorEvent;
交互调用时序图

经过前面的介绍,现在知道了客户端实现的方式及服务端的实现,但是没有具体讲到它们是如何进行通信的,现在看看客户端与服务端之间的通信。
主要涉及的是进程间通信,有IBind和管道通信。
客户端通过IBind通信获取到服务端的远程调用,然后通过管道进行sensor数据的传输。
服务端
native层实现了sensor服务的核心实现,Sensor服务的主要流程的实现在sensorservice类中,下面重点分析下这个类的流程。
class SensorService :
public BinderService,
public BnSensorServer,
protected Thread
看看sensorService继承的类:
继承BinderService这个模板类添加到系统服务,用于Ibinder进程间通信。
 View Code
View Code
在前面的介绍中,SensorService服务的实例是在System_init.cpp中调用SensorService::instantiate()创建的,即调用了上面的instantiate()方法,接着调用了publish(),在该方法中,我们看到了new SensorService的实例,并且调用了defaultServiceManager::addService()将Sensor服务添加到了系统服务管理中,客户端可以通过defaultServiceManager:getService()获取到Sensor服务的实例。
继承BnSensorServer这个是sensor服务抽象接口类提供给客户端调用:
class Sensor;
class ISensorEventConnection;
class ISensorServer : public IInterface
{
public:
DECLARE_META_INTERFACE(SensorServer);
//获取Sensor列表
virtual Vector getSensorList() = 0;
//创建一个连接的接口,这些都是提供给客户端的抽象接口,服务端实例化时候必须实现
virtual sp createSensorEventConnection() = 0;
};
class BnSensorServer : public BnInterface
{
public:
//传输打包数据的通讯接口,在BnSensorServer被实现
virtual status_t onTransact( uint32_t code,
const Parcel& data,
Parcel* reply,
uint32_t flags = 0);
};
}; // namespace android
ISensorServer接口提供了两个抽象方法给客户端调用,关键在于createSensorEventConnection()方法,该在服务端被实现,在客户端被调用,并返回一个SensorEventConnection的实例,创建连接,客户端拿到SensorEventConnection实例之后,可以对sensor进行通信操作,仅仅作为通信的接口而已,它并没有用来传送Sensor数据,因为Sensor数据量比较大,IBind实现比较困难。真正实现Sensor数据传送的是管道,在创建SensorEventConnection实例中,创建了BitTube对象,里面创建了管道,用于客户端与服务端的通信。
客户端
时序图

客户端主要在SensorManager.cpp中创建消息队列
class ISensorEventConnection;
class Sensor;
class Looper;
// ----------------------------------------------------------------------------
class SensorEventQueue : public ASensorEventQueue, public RefBase
{
public:
SensorEventQueue(const sp& connection);
virtual ~SensorEventQueue();
virtual void onFirstRef();
//获取管道句柄
int getFd() const;
//向管道写数据
static ssize_t write(const sp& tube,
ASensorEvent const* events, size_t numEvents);
//向管道读数据
ssize_t read(ASensorEvent* events, size_t numEvents);
status_t waitForEvent() const;
status_t wake() const;
//使能Sensor传感器
status_t enableSensor(Sensor const* sensor) const;
status_t disableSensor(Sensor const* sensor) const;
status_t setEventRate(Sensor const* sensor, nsecs_t ns) const;
// these are here only to support SensorManager.java
status_t enableSensor(int32_t handle, int32_t us) const;
status_t disableSensor(int32_t handle) const;
private:
sp getLooper() const;
//连接接口,在SensorService中创建的
sp mSensorEventConnection;
//管道指针
sp mSensorChannel;
mutable Mutex mLock;
mutable sp mLooper;
};
SensorEventQueue类作为消息队列,作用非常重要,在创建其实例的时候,传入了SensorEventConnection的实例,SensorEventConnection继承于ISensorEventConnection。
SensorEventConnection其实是客户端调用SensorService的createSensorEventConnection()方法创建的,它是客户端与服务端沟通的桥梁,通过这个桥梁,可以完成一下任务:
- 获取管道的句柄
- 往管道读写数据
- 通知服务端对Sensor使能
流程解析
客户端获取SensorService服务实例
客户端初始化的时候,即SystemSensorManager的构造函数中,通过JNI调用,创建native层SensorManager的实例,然后调用SensorManager::assertStateLocked()方法做一些初始化的动作。
status_t SensorManager::assertStateLocked() const {
if (mSensorServer == NULL) {
// try for one second
const String16 name("sensorservice");
……
status_t err = getService(name, &mSensorServer);
……
mSensors = mSensorServer->getSensorList();
size_t count = mSensors.size();
mSensorList = (Sensor const**)malloc(count * sizeof(Sensor*));
for (size_t i=0 ; i
前面我们讲到过,SensorService的创建的时候调用了defaultServiceManager:getService()将服务添加到了系统服务管理中。
现在我们又调用defaultServiceManager::geService()获取到SensorService服务的实例。
在通过IBind通信,就可以获取到Sensor列表,所以在客户端初始化的时候,做了两件事情:
- 获取SensorService实例引用
- 获取Sensor传感器列表
注册SensorLisenter
时序图

new ListenerDelegate(SensorEventListener listener, Sensor sensor, Handler handler)
在这个构造函数中会创建一个Handler,它会在获取到Sensor数据的时候被调用。
mHandler = new Handler(looper) {
@Override
public void handleMessage(Message msg) {
final SensorEvent t = (SensorEvent)msg.obj;
final int handle = t.sensor.getHandle();
switch (t.sensor.getType()) {
// Only report accuracy for sensors that support it.
case Sensor.TYPE_MAGNETIC_FIELD:
case Sensor.TYPE_ORIENTATION:
// call onAccuracyChanged() only if the value changes
final int accuracy = mSensorAccuracies.get(handle);
if ((t.accuracy >= 0) && (accuracy != t.accuracy)) {
mSensorAccuracies.put(handle, t.accuracy);
mSensorEventListener.onAccuracyChanged(t.sensor, t.accuracy);
}
break;
default:
// For other sensors, just report the accuracy once
if (mFirstEvent.get(handle) == false) {
mFirstEvent.put(handle, true);
mSensorEventListener.onAccuracyChanged(
t.sensor, SENSOR_STATUS_ACCURACY_HIGH);
}
break;
}
mSensorEventListener.onSensorChanged(t);
sPool.returnToPool(t);
}
};
创建消息队列
时序图

当客户端第一次注册监听器的时候,就需要创建一个消息队列,也就是说,android在目前的实现中,只创建了一个消息队列,一个消息队列中有一个管道,用于服务端与客户断传送Sensor数据。
在SensorManager.cpp中的createEventQueue方法创建消息队列:
sp SensorManager::createEventQueue()
{
sp queue;
Mutex::Autolock _l(mLock);
while (assertStateLocked() == NO_ERROR) {
//创建连接接口
sp connection =
mSensorServer->createSensorEventConnection();
if (connection == NULL) {
// SensorService just died.
LOGE("createEventQueue: connection is NULL. SensorService died.");
continue;
}
//创建消息队列
queue = new SensorEventQueue(connection);
break;
}
return queue;
}
客户端与服务器创建一个SensorEventConnection连接接口,而一个消息队列中包含一个连接接口。
创建连接接口:
sp SensorService::createSensorEventConnection()
{
sp result(new SensorEventConnection(this));
return result;
}
SensorService::SensorEventConnection::SensorEventConnection(
const sp& service)
: mService(service), mChannel(new BitTube ())
{
}
关键在于BitTube,在构造函数中创建了管道:
BitTube::BitTube()
: mSendFd(-1), mReceiveFd(-1)
{
int sockets[2];
if (socketpair(AF_UNIX, SOCK_SEQPACKET, 0, sockets) == 0) {
int size = SOCKET_BUFFER_SIZE;
setsockopt(sockets[0], SOL_SOCKET, SO_SNDBUF, &size, sizeof(size));
setsockopt(sockets[0], SOL_SOCKET, SO_RCVBUF, &size, sizeof(size));
setsockopt(sockets[1], SOL_SOCKET, SO_SNDBUF, &size, sizeof(size));
setsockopt(sockets[1], SOL_SOCKET, SO_RCVBUF, &size, sizeof(size));
fcntl(sockets[0], F_SETFL, O_NONBLOCK);
fcntl(sockets[1], F_SETFL, O_NONBLOCK);
mReceiveFd = sockets[0];
mSendFd = sockets[1];
} else {
mReceiveFd = -errno;
ALOGE("BitTube: pipe creation failed (%s)", strerror(-mReceiveFd));
}
}
其中:fds[0]就是对应的mReceiveFd,是管道的读端,sensor数据的读取端,对应的是客户端进程访问的。
fds[1]就是对应mSendFd,是管道的写端,sensor数据写入端,是sensor的服务进程访问的一端。
通过pipe(fds)创建管道,通过fcntl来设置操作管道的方式,设置通道两端的操作方式为O_NONBLOCK ,非阻塞IO方式,read或write调用返回-1和EAGAIN错误。
总结下消息队列
客户端第一次注册监听器的时候,就需要创建一个消息队列,客户端创了SensorThread线程从消息队列里面读取数据。
SensorEventQueue中有一个SensorEventConnection实例的引用,SensorEventConnection中有一个BitTube实例的引用。
使能Sensor
客户端创建了连接接口SensorEventConnection后,可以调用其方法使能Sensor传感器:
status_t SensorService::SensorEventConnection::enableDisable(
int handle, bool enabled)
{
status_t err;
if (enabled) {
err = mService->enable(this, handle);
} else {
err = mService->disable(this, handle);
}
return err;
}
handle对应着Sensor传感器的句柄
服务端往管道写数据
bool SensorService::threadLoop()
{
……
do {
count = device.poll(buffer, numEventMax);
recordLastValue(buffer, count);
……
// send our events to clients...
const SortedVector< wp > activeConnections(
getActiveConnections());
size_t numConnections = activeConnections.size();
for (size_t i=0 ; i connection(
activeConnections[i].promote());
if (connection != 0) {
connection->sendEvents(buffer, count, scratch);
}
}
} while (count >= 0 || Thread::exitPending());
return false;
}
前面介绍过,在SensorService中,创建了一个线程不断从HAL层读取Sensor数据,就是在threadLoop方法中。
关键在与下面了一个for循环,其实是扫描有多少个客户端连接接口,然后就往没每个连接的管道中写数据。
status_t SensorService::SensorEventConnection::sendEvents(
sensors_event_t const* buffer, size_t numEvents,
sensors_event_t* scratch)
{
// filter out events not for this connection
size_t count = 0;
if (scratch) {
……
}
……
if (count == 0)
return 0;
ssize_t size = mChannel->write(scratch, count*sizeof(sensors_event_t));
……
}
调用该连接接口的BitTube::write():
ssize_t BitTube::write(void const* vaddr, size_t size)
{
ssize_t err, len;
do {
len = ::send(mSendFd, vaddr, size, MSG_DONTWAIT | MSG_NOSIGNAL);
err = len < 0 ? errno : 0;
} while (err == EINTR);
return err == 0 ? len : -err;
} }
到此,服务端就完成了往管道的写端写入数据。
客户端读管道数据
时序图
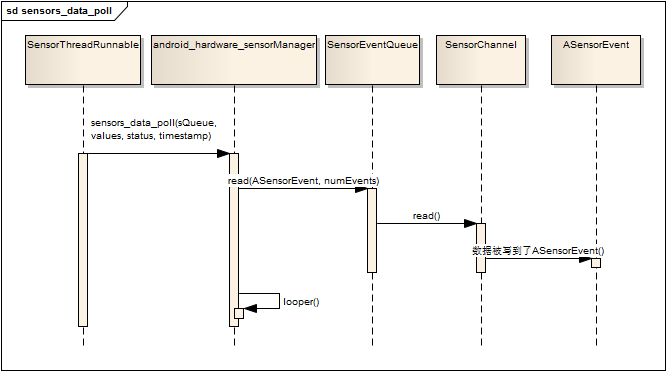
ssize_t SensorEventQueue::read(ASensorEvent* events, size_t numEvents)
{
return BitTube::recvObjects(mSensorChannel, events, numEvents);
}
调用到了BitTube::read():
static ssize_t recvObjects(const sp& tube,
T* events, size_t count) {
return recvObjects(tube, events, count, sizeof(T));
}
ssize_t BitTube::recvObjects(const sp& tube,
void* events, size_t count, size_t objSize)
{
ssize_t numObjects = 0;
for (size_t i=0 ; i(events) + objSize * i;
ssize_t size = tube->read(vaddr, objSize);
if (size < 0) {
// error occurred
return size;
} else if (size == 0) {
// no more messages
break;
}
numObjects++;
}
return numObjects;
}
ssize_t BitTube::read(void* vaddr, size_t size)
{
ssize_t err, len;
do {
len = ::recv(mReceiveFd, vaddr, size, MSG_DONTWAIT);
err = len < 0 ? errno : 0;
} while (err == EINTR);
if (err == EAGAIN || err == EWOULDBLOCK) {
return 0;
}
return err == 0 ? len : -err;
}
参考文章
http://blog.sina.com.cn/u/2314572533
http://blog.csdn.net/cs_lht