OpenCvSharp 学习笔记3 --图像的修改和保存 以及掩膜操作
一 :图像的颜色空间转换
在OpenCvSharp中颜色转换函数为:Cv2.CvtColor()
参数:
| 参数 | 说明 |
|---|---|
| src: | 源图像,8位无符号,16位无符号或单精度浮点 |
| dst: | 输出图像,具有与src相同的大小和深度 |
| code: | 颜色空间转换代码:(ColorConversionCodes)枚举类型 |
代码:
static void Main(string[] args)
{
Mat src = new Mat(@"C:\Users\whx\Desktop\opcvImage\s1.jpg ", ImreadModes.Color);
if (src == null) //上面的加载方式如果找不到指定的文件也会报错
{
Console.WriteLine("加载图像失败");
return;
}
Mat outImage = new Mat(); //声明一个容器,装载改变后的图像
//参数:1 原图矩阵容器 2:保存图像的矩阵容器 3:颜色转换通道(很多,查手册)
Cv2.CvtColor(src, outImage, ColorConversionCodes.RGB2GRAY); //转为灰度空间图像,
//参数:1 要保存图片的路径 2:图像的矩阵容器 ,(图片保存格式个根据自定义的后缀名)
Cv2.ImWrite(@"C:\Users\whx\Desktop\out.png", outImage);//保存到桌面
using (new Window("src", WindowMode.Normal, src))
using (new Window("out", WindowMode.Normal, outImage))
{
Cv2.WaitKey();
}
}
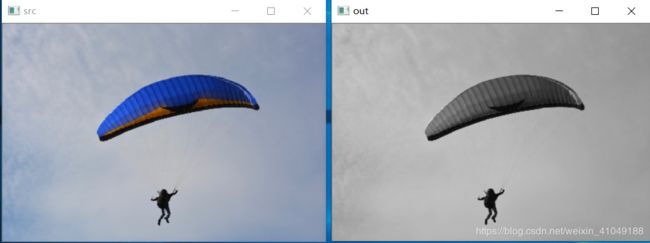
左边是源图像,右边是转为灰度空间的图像,保存路径在桌面。
转为灰度空间的类型在 OpenCvSharp 中的 ColorConversionCodes.RGB2GRAY 与 ColorConversionCodes.BRR2GRAY 都能实现,OpenCvSharp 加载进来的图像是哪一种?
代码
static void Main(string[] args)
{
#region
//自定义一张全红色的图片
Mat src = new Mat(100,100,MatType.CV_8UC3,new Scalar(0,0,255));
Vec3b vec3B = new Vec3b();
//获取第一个像素的三通道像素值
vec3B.Item0 = src.At(0, 0)[0];
vec3B.Item1 = src.At(0, 0)[1];
vec3B.Item2 = src.At(0, 0)[2];
Console.WriteLine("0 :"+vec3B.Item0); //控制台输出
Console.WriteLine("1 :"+vec3B.Item1);
Console.WriteLine("2 :"+vec3B.Item2);
using (new Window("src image", WindowMode.FreeRatio, src)) //创建一个新窗口显示图像
{
Cv2.WaitKey();
}
#endregion
}
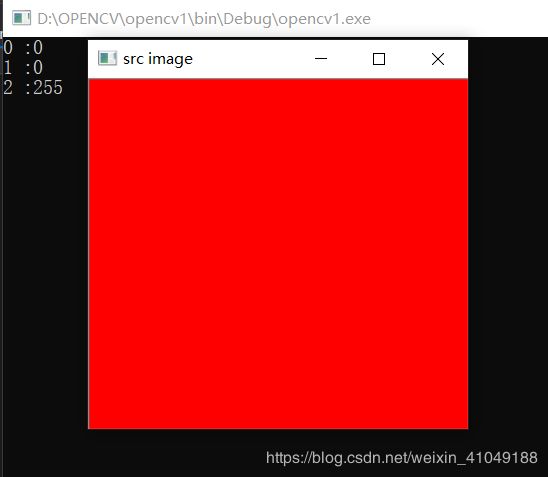
根据输出像素值(0,0,255)可以看出 OpenCvSharp 三通道像素值排列为:BGR
二: 掩膜操作,提高图像对比度
使用Cv2.Filter2D函数:
| 参数 | 说明 |
|---|---|
| src: | 输入的源图像 |
| dst: | 输出图像,一个Mat 对象,与原图图像具有相同的大小和图像深度 |
| ddepth: | 目标图像的所需深度。如果它是负的,它就是与src.depth()相同,不确定时就填 -1 |
| kernel: | 卷积核 |
| anchor: | 内核的锚点,表示经过过滤的点的相对位置. (- 1,-1)表示锚位于内核中心 |
| delta: | 在卷积过程中,该值会加到每个像素上。默认情况下,这个值为 0 。相当于一个增益值 |
| borderType: | 指定边缘处理的方法,比较复杂,选择默认值即可。是枚举类型 |
代码:
static void Main(string[] args)
{
using (Mat src = new Mat(@"C:\Users\whx\Desktop\opcvImage\m4.jpg", ImreadModes.AnyColor | ImreadModes.AnyDepth))
using (Mat dst = new Mat())
{
//定义一个掩膜矩阵
InputArray kernel = InputArray.Create(new int[3, 3] { { 0, -1, 0 }, { -1, 5, -1 }, { 0, -1, 0 } });
//进行掩膜操作,提高图片亮度
Cv2.Filter2D(src, dst, -1, kernel, new Point(-1, 1), 0, BorderTypes.Default);
using (new Window("OutputImage", WindowMode.Normal, dst))
using (new Window("InputImage",WindowMode.Normal,src))
{
Cv2.WaitKey(0);
}
}
}

从上图可以看出,OutputImage 比 Inputimage 的亮度明显增强。
三:利用指针修改图像像素值,进行图像对比度处理
代码:
unsafe static void Main(string[] args)
{
Mat src, dst;
src = Cv2.ImRead(@"C:\Users\whx\Desktop\opcvImage\m4.jpg"); //读取图片
if (src.Data == null)
{
Console.WriteLine("加载图像失败");
return;
}
#region
/*
* 两种判断方法都可以
*/
//if(src.Empty()) //如果数组没有元素,则返回true。
//{
// Console.WriteLine("加载图像失败");
// return;
//}
//显示方式2
//new Window("Input Image", WindowMode.FreeRatio);
//Cv2.ImShow("Input Image",src);
//Cv2.WaitKey(0);
#endregion
#region 指针操作增加饱和度
int clos = (src.Cols - 1) * src.Channels(); //RGB有三个通道,(图像的列(长度) * 图像的通道数)
int rows = src.Rows; //行(高度)
int offsetx = src.Channels();
dst = new Mat(src.Size(), src.Type()); //初始化
for (int row = 1; row < rows - 1; row++)
{
IntPtr current = src.Ptr(row); //当前行
byte* curr = (byte*)current.ToPointer();
IntPtr upRow = src.Ptr(row - 1);//上一行
byte* up = (byte*)upRow.ToPointer();
IntPtr nextRow = src.Ptr(row + 1);//下一行
byte* next = (byte*)nextRow.ToPointer();
IntPtr outPut = dst.Ptr(row); //输出
byte* opt = (byte*)outPut.ToPointer();
for (int col = offsetx; col < clos; col++)
{
opt[col] = (byte)Saturate.Saturate_cast((5 * curr[col] - (curr[col - offsetx] + curr[col + offsetx] + up[col] + next[col])));
}
}
#endregion
using (new Window("OutputImage", WindowMode.FreeRatio, dst))
using (new Window("InputImage", WindowMode.FreeRatio, src))
{
Cv2.WaitKey(0);
}
}
public class Saturate
{
//要确保运算后的像素值在正确的范围内
public static int Saturate_cast(int n)
{
if(n<=0)
{
return 0;
}
else if(n>255)
{
return 255;
}
else
{
return n;
}
}
}

效果与上面使用API操作基本一致。这里是由一个计算公式:
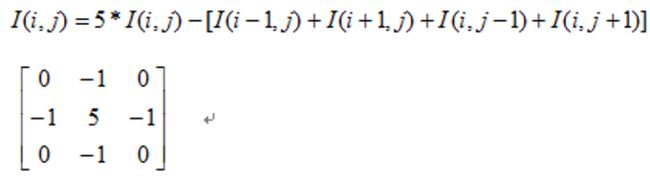
对应这行代码:
opt[col] = (byte)Saturate.Saturate_cast((5 * curr[col] - (curr[col - offsetx] + curr[col + offsetx] + up[col] + next[col])));
四:减少图像亮度
代码:
static void Main(string[] args)
{
Mat src, dst;
src = Cv2.ImRead(@"C:\Users\whx\Desktop\opcvImage\m4.jpg"); //读取图片
dst = new Mat(src.Size(), src.Type()); //初始化
src.CopyTo(dst); //把原图像拷贝到 dst 中
for (int i = 0; i < src.Rows; i++)
{
for (int j = 0; j < src.Cols; j++)
{
Vec3b color = new Vec3b();//新建Vec3b对象(字节的三元组(System.Byte))
color.Item0 = (byte)Saturate.Saturate_cast((src.Get(i, j).Item0 - 50));// B 读取原来的通道值并减50
color.Item1 = (byte)Saturate.Saturate_cast((src.Get(i, j).Item1 - 50)); // G
color.Item2 = (byte)Saturate.Saturate_cast((src.Get(i, j).Item2 - 50)); // R
src.Set(i, j, color);
}
}
using (new Window("Input", WindowMode.FreeRatio, dst))
using (new Window("Output", WindowMode.FreeRatio, src))
{
Cv2.WaitKey(0);
}
}

输出图像明显比输入的亮度下降。
代码:
static void Main(string[] args)
{
Mat src, dst;
src = Cv2.ImRead(@"C:\Users\whx\Desktop\opcvImage\m4.jpg"); //读取图片
dst = new Mat(src.Size(), src.Type()); //初始化
src.CopyTo(dst); //把原图像拷贝到 dst 中
for (int i = 0; i < src.Rows; i++)
{
for (int j = 0; j < src.Cols; j++)
{
Vec3b color = new Vec3b();//新建Vec3b对象(字节的三元组(System.Byte))
color.Item0 = (byte)Saturate.Saturate_cast((src.Get(i, j).Item0 + 50));//读取原来的通道值并加50
color.Item1 = (byte)Saturate.Saturate_cast((src.Get(i, j).Item1 + 50));
color.Item2 = (byte)Saturate.Saturate_cast((src.Get(i, j).Item2 + 50));
src.Set(i, j, color);
}
}
using (new Window("Input", WindowMode.FreeRatio, dst))
using (new Window("Output", WindowMode.FreeRatio, src))
{
Cv2.WaitKey(0);
}
}

输出图像明显比输入的亮度提高很多。