《雷达系统设计MATLAB仿真》学习
文章目录
- 第一章
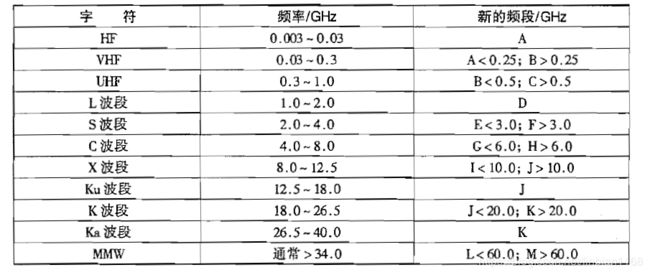
- 雷达分类
- 按频段分类
- 按波形分类
- 按用途分类
- 监视雷达
- 跟踪雷达
- 第四章
- 模糊函数
- 模糊函数的几点应用
- 目标分辨情况
- 测量精度
- 模糊情况
- 杂波抑制能力
- 输出功率波形
- 第六章
- 杂波
- 擦地角、掠射角、下俯角、入射角
- 海杂波
- 地杂波
- RCS
- 第七章
- 单延迟线对消器/双延迟线对消器
- 递归滤波器
- MTI
- 脉冲发射机频谱
- 第九章
- 自动检测
- 单脉冲
- 比幅单脉冲
- 比相单脉冲
- 雷达信号处理基础
- 在雷达中重要的概率分布
- 功率分布
- 电压分布
- 相位分布
- 常规处理流程
- 雷达的时间尺度
- 天线
第一章
雷达分类
按频段分类
参见《雷达系统设计Matlab仿真》

按波形分类

按用途分类
参见《雷达与探测》
此处摘图、引用只引述了部分内容
监视雷达

跟踪雷达
跟踪雷达通常是指能够连续跟踪特定目标、不断地对目标坐标进行精确测量并输出目标坐标位置(如目标方位(A) 、目标仰角( E ) 、目标斜距( R ) 和径向速度( v) 等参数)的雷达。
第四章
模糊函数
参见《雷达系统设计Matlab仿真》、《现代信号处理_胡广书》

模糊函数的图形称为模糊图,一般被用来确定某一给定图形的目标分辨能力。
模糊函数的图形是三维图,难以描述,一般使用三维模糊图的等高图作为模糊图,对应着某个门限值的三维模糊图的时频截面

模糊函数的几点应用
参见“模糊函数”的几点应用
目标分辨情况
模糊函数与目标环境图结合起来,可以观察目标分辨情况。当多个目标同时存在于目标环境图上其中一个是待观测目标时,其余目标都是干扰目标。此时可将模糊图的原点直接重合到目标环境图上。如果干扰杂波或目标落入模糊椭圆之内,则不能分辨。否则可以分辨。
测量精度
若没有噪声(理想情况),根据匹配滤波器的输出可以精确地复现信号的模糊函数。有主峰的位置可以精确估计目标,即目标距离和相对径向速度。通常存在噪声,主峰的最大值位置会产生偏移,带来测量误差。主峰越尖锐,噪声引起的主峰值的偏移越小,目标距离、速度的测量精度越高。
模糊情况
有些信号除了在原点存在模糊函数的主峰外,在其它地方还按一定规律分布着尖峰-模糊瓣。当干扰信号落入模糊瓣内,则会造成混淆。我们设计波形时,应尽量避免回波信号落入模糊瓣内。
杂波抑制能力
若已知目标环境图,它与目标环境图重叠,观察主峰与杂波干扰是否交叠,可以迅速地判断此种信号在这种环境下是否适用,也可用此法选择在此环境条件下适用的波形。若在杂波干扰区内,模糊函数,则此波形具有良好的杂波抑制能力。
输出功率波形
模糊图函数可以看成是匹配滤波器响应模值平方的组合,因此可以用来描述匹配滤波器对目标环境图中的匹配目标与邻近目标的输出功率波形。
第六章
杂波
杂波主要可以分为面杂波和体杂波两类。面杂波包括数目、植被、地表、人造建筑及海杂波;体杂波通常拥有大的范围(尺寸),其包括金属箔条、雨、鸟、昆虫。面杂波会随着区域的不同而改变,而体杂波更具有可预测性。
擦地角、掠射角、下俯角、入射角


海杂波
在小和中等的入射余角范围内,海杂波信号的强度随入射角的增大而增大,随风速(或海表面状态)的增强而增强,并且在垂直极化和逆风/顺风方向上杂波信号强度通常较大。
地杂波
RCS
参见雷达截面积(Radar Cross Section,RCS)(MATLAB部分仿真+Code)
RCS是视角、频率、极化的复杂函数。


第七章
单延迟线对消器/双延迟线对消器
clc;clear all;close all;
f = 0:0.01:3;
FS = 1;
b = [1 -1];
a = [1];
[H,w]=freqz(b,a,f,FS);
HF_0=abs(H)/max(abs(H));
b = conv(b,b); %级联
[H,w]=freqz(b,a,f,FS);
HF_1=abs(H)/max(abs(H));
figure;subplot(2,1,1);
hold on;
plot(w,HF_0);
plot(w,HF_1);
hold off;
legend('单延迟线','双延迟线')
subplot(2,1,2);
hold on;
plot(w,20*log10(HF_0));
plot(w,20*log10(HF_1));
hold off;
legend('单延迟线','双延迟线')

递归滤波器
为了避免由于正反馈造成的动荡,k值必须小于1。(1-k)^(-1)的值通常等于从目标接收到的回波脉冲数目。
clc;clear all;close all;
f = 0:0.01:1;
FS = 1;
k = 0.25;
b = [1 -1];
a = [1 -k];
[H,W] = freqz(b,a,f,FS);
y1 = abs(H);
k = 0.7;
b = [1 -1];
a = [1 -k];
[H,W] = freqz(b,a,f,FS);
y2 = abs(H);
k = 0.9;
b = [1 -1];
a = [1 -k];
[H,W] = freqz(b,a,f,FS);
y3 = abs(H);
k = 0.98;
b = [1 -1];
a = [1 -k];
[H,W] = freqz(b,a,f,FS);
y4 = abs(H);
figure;
hold on;
plot(f,y1,'r-');
plot(f,y2,'b*');
plot(f,y3,'k^');
plot(f,y4,'r*');
hold off;
legend('k=0.25','k=0.7','k=0.9','k=0.98')

MTI
脉冲发射机频谱
参见《雷达手册_2.4》

第九章
自动检测
参见《雷达手册_7.2》
1- 如果同相和正交分量分别是高斯分布的,那么包络是瑞利分布的,而功率是指数分布的;
2- 未解决非相参、虚警问题,可采用 自适应设置门限、非参量型型检测器和杂波图 的方法。

单脉冲
“单脉冲”,指的是能在单个脉冲上的得到角误差信息的能力,它已成为"跟踪技术"的通用名称。
比幅单脉冲
使用一个特殊的天线馈电方式以使四个波束由一个脉冲产生,因而称为"单脉冲",例如


比相单脉冲

雷达信号处理基础
在雷达中重要的概率分布
雷达信号处理基础_附录A
功率分布
χ2分布
参见 三大抽样分布:卡方分布,t分布和F分布的简单理解



指数分布
韦布尔分布
参见Weibull分布(韦伯分布、威布尔分布)

对数正态分布
![]()

K分布
电压分布
瑞利分布
中心χ分布
偏正χ分布
莱斯分布
K分布
相位分布
均匀分布
Tikhonov分布
常规处理流程

雷达的时间尺度

天线
参见波束形成半功率宽度(HPBW)和瑞利限(BW)
常见的天线类型包括抛物面反射天线、扫描馈源天线、透镜天线和相控阵天线。从信号处理角度,天线最重要的特性是增益、波束宽度和旁瓣电平。
3dB带宽 Δu=0.891 λ/D
瑞利波束宽度 Δu=λ/D
AZ=水平方向图
EI=俯仰方向图
