Cuda中Global memory中coalescing例程解释
Global memory是cuda中最常见的存储类型,又叫做Device memory,位于Host主机区域上,它的生命周期是在整个Grid里面,大约具有500个cycle latency。在cuda并行程序中,尽量用Coalesing accessing的策略来最大化带宽bandwidth。什么是
Coalesing accessing呢?如图所示:
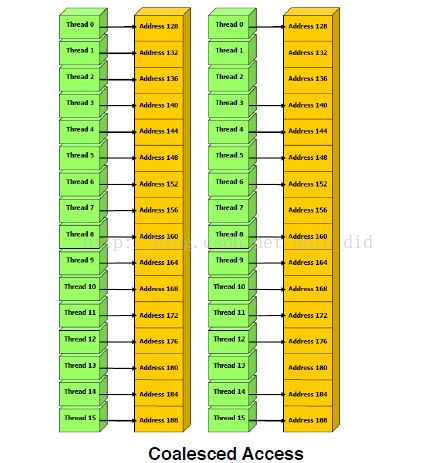
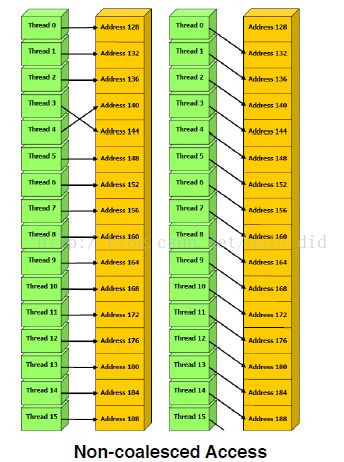
当半个Warp的16个threads在一次memory transaction中coalesced时,Global memory中的带宽得到了最大的利用。其中,需要注意的是,Device在一次transaction中,从global memory中可以一次读取32-bit,64-bit,128-bit,例如
64 bytes - each thread reads a word: int, float, …
128 bytes - each thread reads a double-word: int2, float2, …
32 bytes (compute capability 1.2+) - each thread reads a short
int.
下面有两个实例来说明Global memory中的coalescing问题:
1)float3型Uncoalesced
__global__ void accessFloat3(float3 *d_in,
float3* d_out)
{
int index = blockIdx.x * blockDim.x + threadIdx.x;
float3 a = d_in[index];
a.x += 2;
a.y += 2;
a.z += 2;
d_out[index] = a;
}
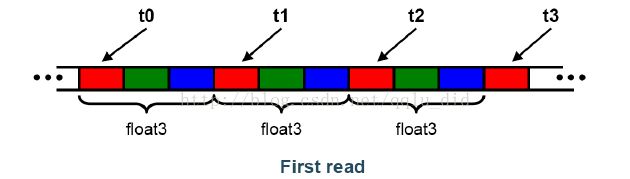
在这段代码中,float3有12个bytes,不等于要求的4,8,16 bytes,半个warp读取3个64bytes中非连续区域,如图:
有三种方法可以解决这个问题
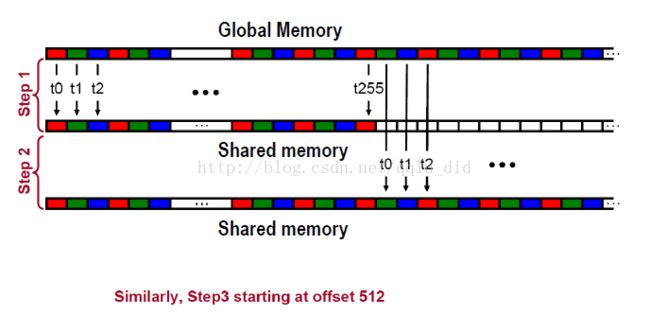
1:使用shared memory,也叫做3-step approach
假如每个block中使用256个threads,这样一个thread block需要 sizeof(float3)*256 bytes的share memory空间,每个thread读取3个单独的float型,这实质上是指讲输入定义为float型,在核函数里面讲读取在share memory中的float变量转换为float3型并进行操作,最后再转换成float型输出,如图;
代码如下:

如果不好理解的话,假设我们的blockDim=4,取4个float3型变量,我们会发现,每一个thread中输入操作(输出操作一样)为:
Thread 0:
S_data[0]=g_in[0];
S_data[4]=g_in[4]; S_data[8]=g_in[8];
Thread 1:
S_data[1]=g_in[1];
S_data[5]=g_in[5]; S_data[9]=g_in[9];
Thread 2:
S_data[2]=g_in[2];
S_data[6]=g_in[6]; S_data[10]=g_in[10];
Thread 3:
S_data[3]=g_in[3];
S_data[7]=g_in[7]; S_data[11]=g_in[11];
可以看出,对于每个thread同一时刻(similar step)的数据读入,地址均是连续,这样就达到了coalescing。
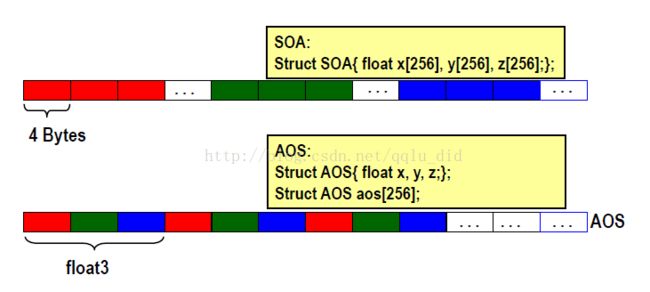
2)使用数组的结构体(SOA)来取代结构体的数组(AOS)
3)使用alignment specifiers
__align__(X), where X = 4, 8, or 16
struct __align__(16) {
float x;
float y;
float z;
};
尽管这损失了比较多的空间:

2)第二个实例:矩阵转置 Matrix Transpose.
一般做法:Uncoalesced Transpose,GMEM为Global memory
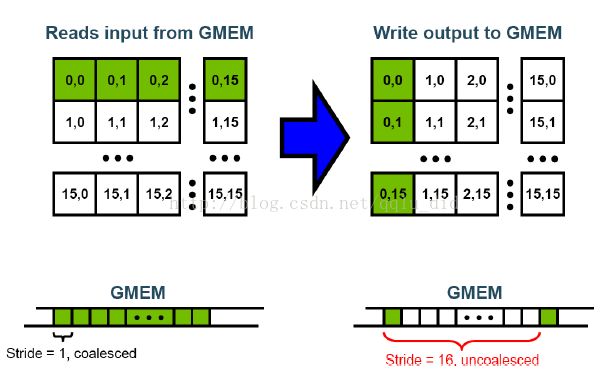
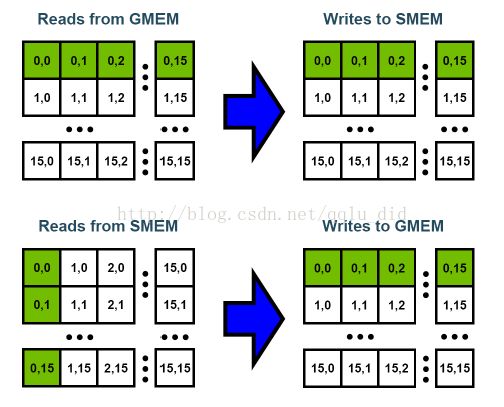
我们发现一般的做法,在写output时,地址是不连续的,即uncoalesced,因此我们利用shared memory存储输入数据,根据转置的关系,来实现coalescing,SMEM为shared memory,如下图:
代码如下:
__global__ void transpose(float *odata, float *idata, int width, int height)
{
__shared__ float block[BLOCK_DIM*BLOCK_DIM];
unsigned int xBlock = blockDim.x * blockIdx.x;
unsigned int yBlock = blockDim.y * blockIdx.y;
unsigned int xIndex = xBlock + threadIdx.x;
unsigned int yIndex = yBlock + threadIdx.y;
unsigned int index_out, index_transpose;
if (xIndex < width && yIndex < height)
{
unsigned int index_in = width * yIndex + xIndex;
unsigned int index_block = threadIdx.y * BLOCK_DIM + threadIdx.x;
block[index_block] = idata[index_in];
index_transpose = threadIdx.x * BLOCK_DIM + threadIdx.y;
index_out = height * (xBlock + threadIdx.y) + yBlock + threadIdx.x;
}
__syncthreads();
if (xIndex < width && yIndex < height)
odata[index_out] = block[index_transpose];
程序的逻辑关系有时还挺绕的,
我们以一个4*4矩阵为例,将逻辑关系展示如下:
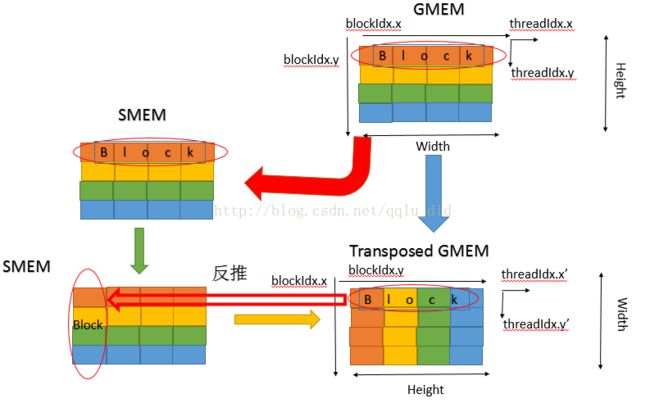
设dim3 gridDim(4,1), dim3 blockDim(1,4),以橙色block为例,如输入数据时,将其放入到sharememory中,代码体现在:
unsigned int index_in = width * yIndex + xIndex;
unsigned int index_block = threadIdx.y * BLOCK_DIM + threadIdx.x;
block[index_block] = idata[index_in];
接下来的代码实际上是将block的区域给换了,如左下图所示,block换成了一列四种不同颜色的,最终转置的矩阵如右下图所示,从图示可以看出,最终结果的坐标系Height、Width、blockIdx.x、
blockIdx.y均对位变换了,这时我们只需要找threadIdx.x'、threadIdx.y'与threadIdx.x、threadIdx.y之间的关系,其实可以看出,一个block里面的坐标系没有发生变换,则threadIdx.x'=threadIdx.x,threadIdx.y'=threadIdx.y,所以代码如下:
index_transpose = threadIdx.x * BLOCK_DIM + threadIdx.y;
index_out = height * (xBlock + threadIdx.y) + yBlock + threadIdx.x;
总体来说,Global memory中coalescing就是保证其在数据读取或者写入时,使用连续的地址,且地址所存储的变量尺寸为32、64、128 bit,我们常常使用share memory来解决coalescing问题。