//函数原型:版本号linux-3.0.8
struct task_struct *__switch_to(structtask_struct *, struct thread_info *, struct thread_info *);
#define switch_to(prev,next,last) \
do { \
last =__switch_to(prev,task_thread_info(prev), task_thread_info(next)); \
} while (0)
//首先我们看一下以下的宏:
#define offsetof(TYPE, MEMBER) ((size_t) &((TYPE*)0)->MEMBER)
//以下事实上就是指向相应的struct成员
/*
CC_STACKPROTECT补丁是Tejun Heo在年给主线kernel提交的一个用来防止内核堆栈溢出的补丁。
默认的config是将这个选项关闭的,能够在编译内核的时候。改动.config文件为CONFIG_CC_STACKPROTECTOR=y
来启用。未来飞天内核能够将这个选项开启来防止利用内核stack溢出的day攻击。这个补丁的防
溢出原理是:在进程启动的时候,在每一个buffer的后面放置一个预先设置好的stack canary。你
能够把它理解成一个哨兵,当buffer发生缓冲区溢出的时候。肯定会破坏stack canary的值,当
stack canary的值被破坏的时候。内核就会直接当机。
那么是怎么推断stack canary被覆盖了呢?
事实上这个事情是gcc来做的,内核在编译的时候给gcc加了个-fstack-protector參数.
*/
DEFINE(TSK_STACK_CANARY, offsetof(struct task_struct,stack_canary));
//task_struct
DEFINE(TI_TASK, offsetof(struct thread_info, task));
//
/*
* Domain types
*/
/*
#define DOMAIN_NOACCESS 0
#define DOMAIN_CLIENT 1//是用户的域(运行程序,訪问数据),以及由所述接入加以防护
//个别章节和页面组成域的权限。
#ifdef CONFIG_CPU_USE_DOMAINS
#define DOMAIN_MANAGER 3//控制域的行为(当前域的sections和page。以及域訪问)。
#else
#define DOMAIN_MANAGER 1
#endif
*/
//相应图
//这个domain通过协处理器设置寄存器DomainAccess Control
DEFINE(TI_CPU_DOMAIN, offsetof(struct thread_info,cpu_domain));
/*
struct cpu_context_save {
__u32 r4;
__u32 r5;
__u32 r6;
__u32 r7;
__u32 r8;
__u32 r9;
__u32 sl;
__u32 fp;
__u32 sp;
__u32 pc;
__u32 extra[2]; /* Xscale 'acc' register, etc */
};
*/
DEFINE(TI_CPU_SAVE, offsetof(struct thread_info,cpu_context));
/*
在以下有个set_tls,相应我的平台set_tls_v6k
.macroset_tls_v6k, tp, tmp1, tmp2
mcr p15, 0, \tp, c13, c0, 3 @ set TLS register
.endm
tp_value就是为了设置TLS register的值
在多线程应用程序。当中一个进程共享同样的地址空间中的全部线程。还有常常出现须要维护的数据是唯一
的一个线程。TLS或线程本地存储。由于你或许能够从它的名字如今弄清楚。是用于线程抽象的概念。它是
一种高速和有效的方式来存储每一个线程的本地数据。
线程的本地数据的偏移量是通过TLS寄存器(H / W或S
/ W块),它指向线程各自的线程控制块訪问。
之前ARM内核。甚至ARM9和ARM11核心的一些不具备这样的TLS注冊物理上可用。
操作系统(Linux从这里開始)
须要效仿的软件。新一代的ARM内核。Cortex-AX起,确实有这TLS的寄存器可用(CP15)。
内核对TLS须要做的事情是可以让用户态程序(一般是nptl——一个pthread的实现)在某个时刻可以设置
线程唯一的基址值到内核的线程信息结构内。
*/
DEFINE(TI_TP_VALUE, offsetof(struct thread_info, tp_value));
/*
* These are the reasoncodes for the thread notifier.
*/
#define THREAD_NOTIFY_FLUSH 0
#define THREAD_NOTIFY_EXIT 1
#define THREAD_NOTIFY_SWITCH 2
#define THREAD_NOTIFY_COPY 3
/*
* Register switch for ARMv3 and ARMv4 processors
* r0 = previous task_struct, r1 = previous thread_info, r2 = next thread_info
* previous and next are guaranteed not to be the same.
*/
ENTRY(__switch_to)
UNWIND(.fnstart )
UNWIND(.cantunwind )
//ip就是上一个线程的thread_info里面的cpu_context的地址
add ip, r1, #TI_CPU_SAVE
//r3里面存着下一个线程tp值
ldr r3, [r2, #TI_TP_VALUE]
//存储r4 - sl, fp, sp, lr到thread_info->cpu_context里。分别使用arm和thumb实现 //这就是保存现场。 ARM( stmia ip!, {r4 - sl, fp, sp, lr} ) @ Store most regs on stack THUMB( stmia ip!, {r4 - sl, fp} ) @ Store most regs on stack THUMB( str sp, [ip], #4 ) THUMB( str lr, [ip], #4 ) #ifdef CONFIG_CPU_USE_DOMAINS //r6存着下一个线程的DOMAIN属性 ldr r6, [r2, #TI_CPU_DOMAIN] #endif //set_tls 上面已分析 set_tls r3, r4, r5 #if defined(CONFIG_CC_STACKPROTECTOR) && !defined(CONFIG_SMP) ldr r7, [r2, #TI_TASK]//下一个线程的task_struct ldr r8, =__stack_chk_guard//r8里面是__stack_chk_guard地址 ldr r7, [r7, #TSK_STACK_CANARY]//到这里。r7里面是stack_canary值 #endif #ifdef CONFIG_CPU_USE_DOMAINS //设置domain寄存器。 mcr p15, 0, r6, c3, c0, 0 @ Set domain register #endif //r5里面是上一个线程的task_struct mov r5, r0 //r4就是下一个线程的thread_info里面的cpu_context的地址 add r4, r2, #TI_CPU_SAVE //r4 r5仅仅是暂时保存一下 //以下的thread_notify_head通知链,以下样例说明 ldr r0, =thread_notify_head mov r1, #THREAD_NOTIFY_SWITCH bl atomic_notifier_call_chain #if defined(CONFIG_CC_STACKPROTECTOR) && !defined(CONFIG_SMP) str r7, [r8]//__stack_chk_guard = (next)threadinfo->task->stack_canary #endif THUMB( mov ip, r4 )//ip指向线程的thread_info里面的cpu_context的地址 mov r0, r5//r0从新指向上一个线程的task_struct //以下相应了上面的保存现场,这里就是恢复现场。
pc相应了下个进程的cpu_context->pc //从上面看到这个cpu_context->pc就是之前保存现场的lr,就是下个线程要运行的地方。 ARM( ldmia r4, {r4 - sl, fp, sp, pc} ) @ Load all regs saved previously THUMB( ldmia ip!, {r4 - sl, fp} ) @ Load all regs saved previously THUMB( ldr sp, [ip], #4 ) THUMB( ldr pc, [ip] ) UNWIND(.fnend ) ENDPROC(__switch_to)
实验代码:
#include
#include
#include
#include
MODULE_LICENSE("GPL");
static int test_event(struct notifier_block *this, unsigned long event, void *ptr)
{
printk(KERN_INFO "In Event: Event Number is %ld\n",event);
return NOTIFY_DONE;
}
static struct notifier_block test_notifier =
{
.notifier_call = test_event,
};
static int __init reg_notifier(void)
{
int err = 0;
printk(KERN_INFO "Begin to register:\n");
err = thread_register_notifier(&test_notifier);
if (err)
{
printk(KERN_ERR "register test_notifier error\n");
goto fail1;
}
printk(KERN_INFO "register reboot_notifier completed\n");
return 0;
fail1:
return err;
}
static void __exit unreg_notifier(void)
{
thread_unregister_notifier(&test_notifier);
printk(KERN_INFO "Unregister finished\n");
}
module_init(reg_notifier);
module_exit(unreg_notifier);
打印:
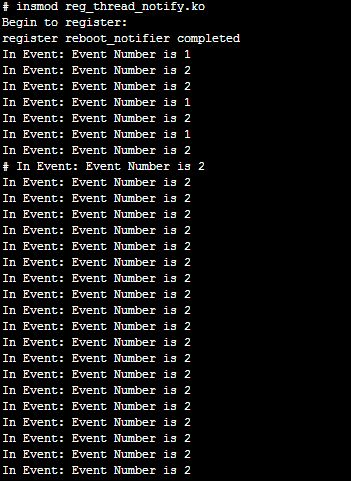
2都是THREAD_NOTIFY_SWITCH,当然会不断的切换!