pytorch实践(改造属于自己的resnet网络结构并训练二分类网络)
在学习pytorch过程中,突然想拥有属于自己的网络结构,于是便自己选择了一个比较简单的resnet18进行改造,并用其对蚂蚁和蜜蜂进行分类,比较一下没有经过预训练的resnet18好还是自己改造的resnet_diy好。
在开始撸代码之前,为了方便大家自己设计网络,我把resnet的pytorch实现详细的解读一遍。
ResNet
ResNet 解决了 deep NN 的两大问题:1. deep NN 的梯度弥散和爆炸问题;2. deep NN 的精度随着模型的加深,会逐渐饱和不再上升,甚至会大幅度下降。其算法原理简单的说,就是通过shorcut将远端的output与近端的output相连接,即H(x)=F(x)+x,以此来解决这两大问题。这个过程并没有严格的数学证明,大概因为shortcut可以很好的bp,详细了解请戳这里。

网络结构如上图所示,resnet有很多变形18/34/50/152。其中 ResNet 18/34 采用 Basic Block 作为基本单元,而 ResNet 50/101/152 则采用 Bottlenet Block 作为基本单元。
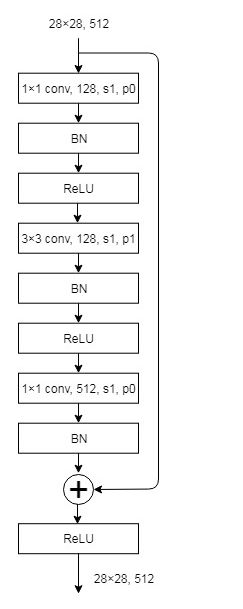
BasicBlock和Bottleneck

Basic Block就是左边的图,包括两个3×3的卷积操作。bollteneck是右边的图,为了减少参数,它采用了两个1×1的卷积。
Resnet18
ResNet 18/34 由 root block,stack 1-4 组成,每一个 stack 都由 Basic Block 叠加而成,所有 Basic Block 都采用 3×3 filter。其中,stack 1 每一层有64个 filter, stack 2 每一层有128个 filter,stack 3 每一层有256个 filter,stack 4 每一层有512个 filter。stack 1-4的数目,ResNet 18 为[2, 2, 2, 2],ResNet 34 为[3, 4, 6, 3]。

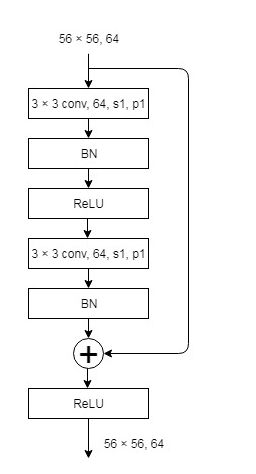
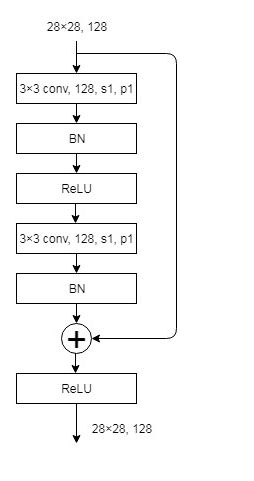
上面从左到右的顺序就是stack1-4的结构,第一个图是简单的卷积操作,并不涉及残差。
pytorch实现
下面我们对pytorch的实现进行详细解读。
class ResNet(nn.Module):
def __init__(self, block, layers, num_classes=1000, zero_init_residual=False):
super(ResNet, self).__init__()
self.inplanes = 64
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3,
bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(block, 64, layers[0])
self.layer2 = self._make_layer(block, 128, layers[1], stride=2)
self.layer3 = self._make_layer(block, 256, layers[2], stride=2)
self.layer4 = self._make_layer(block, 512, layers[3], stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.fc = nn.Linear(512 * block.expansion, num_classes)
显而易见,我们的网络结构可以在代码中清晰的看出来,除了layer1-4,即残差部分的代码有疑惑外,其他结构应该看得很明白,那下面我们就残差部分来讲解。
def _make_layer(self, block, planes, blocks, stride=1):
downsample = None
if stride != 1 or self.inplanes != planes * block.expansion:
downsample = nn.Sequential(
conv1x1(self.inplanes, planes * block.expansion, stride),
nn.BatchNorm2d(planes * block.expansion),
)
layers = []
layers.append(block(self.inplanes, planes, stride, downsample))
self.inplanes = planes * block.expansion
for _ in range(1, blocks):
layers.append(block(self.inplanes, planes))
return nn.Sequential(*layers)
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
首先弄懂几个参数意义,inplanes 是提供给block的通道数,planes表示block的输出通道。大家知道,在做残差相加的时候,我们必须保证残差的维度与真正输出的维度相等(注意这里维度是宽高以及深度)这样我们才能把它们堆到一起,所以程序中出现了降采样操作。
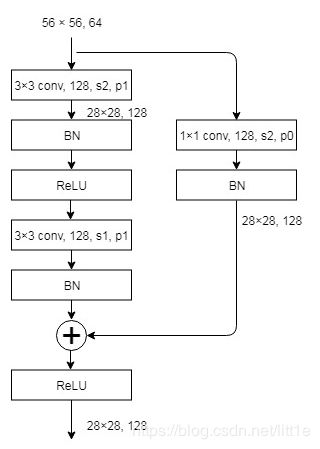
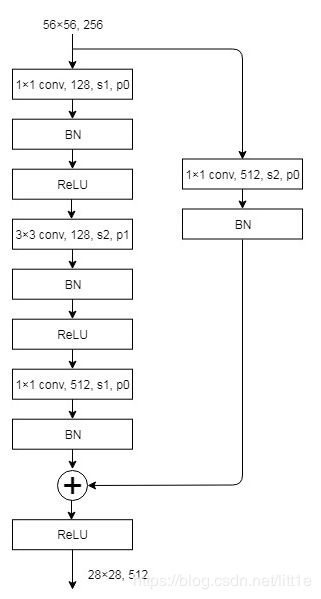
if stride != 1 or self.inplanes != planes * block.expansion:大家注意到这个if语句,它存在两种条件使他为真。第一就是stride != 1,我们以下图为例,输入56×56×256输出为28×28×512,显然,stride=2(resnet没有pooling)这时我们满足第一个条件,所以进入降采样操作,令stride=2,这样我的残差输出就变成了28×28。

再看第二个条件 self.inplanes != planes * block.expansion,这是self.inplanes=256,而planes =512(这里因为basic block,block.expansion=1),所以第二个条件满足,那么进行降采样用1×1卷积改变通道数。
总之,这个步骤就是为了匹配维度。
BatchNorm2d
我们每一层都进行了BN,这里简单介绍一下,为了减小Internal Covariate Shift,对神经网络的每一层做归一化不就可以了,假设将每一层输出后的数据都归一化到0均值,1方差,满足正太分布,但是,此时有一个问题,每一层的数据分布都是标准正太分布,导致其完全学习不到输入数据的特征,因为,费劲心思学习到的特征分布被归一化了,因此,直接对每一层做归一化显然是不合理的。
但是如果稍作修改,加入可训练的参数做归一化,那就是BatchNorm实现的了,接下来结合下图的伪代码做详细的分析:
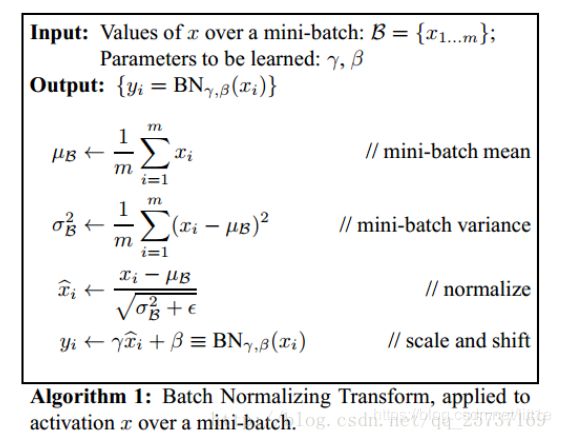
之所以称之为batchnorm是因为所norm的数据是一个batch的,
1.先求出此次批量数据xxx的均值
2.求出此次batch的方差
3.接下来就是对xxx做归一化
4.最重要的一步,引入缩放和平移变量 ,计算归一化后的值
接下来详细介绍一下这额外的两个参数,之前也说过如果直接做归一化不做其他处理,神经网络是学不到任何东西的,但是加入这两个参数后,事情就不一样了,先考虑特殊情况下,如果γ和β分别等于此batch的标准差和均值,那么yi不就还原到归一化前的x了吗,也即是缩放平移到了归一化前的分布,相当于batchnorm没有起作用,β 和γ分别称之为 平移参数和缩放参数 。这样就保证了每一次数据经过归一化后还保留的有学习来的特征,同时又能完成归一化这个操作,加速训练。

其实就是对γ,β反向BP来优化它们。
DIY resnet
我的想法其实很简单,就是在Resnet18的每个block中加一个1×1的卷积,让它的非线性更加丰富,这样网络的表达能力应该可以更好。其实没啥现实意义纯属娱乐。
class BasicBlock(nn.Module):
expansion = 1
def __init__(self, inplanes, planes, stride=1, downsample=None):
super(BasicBlock, self).__init__()
self.conv1 = conv1x1(inplanes, planes) #+
self.bn1 = nn.BatchNorm2d(planes) #+
self.conv2 = conv3x3(planes, planes, stride)
self.bn2 = nn.BatchNorm2d(planes)
self.relu = nn.ReLU(inplace=True)
self.conv3 = conv3x3(planes, planes)
self.bn3 = nn.BatchNorm2d(planes)
#self.conv4 = conv1x1(planes, planes)
# self.bn4 = nn.BatchNorm2d(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
# out = self.relu(out)
# out = self.conv4(out)
# out = self.bn4(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
改的部分就这些,大家在理解了代码之后也可以试一试,还是很有成就感的。
我的主要思想:用未训练的resnet18(需要将它的模型稍微改变一下,因为原来的模型是在imagenet数据集上训练的,而我们是简单的蜜蜂和蚂蚁的二分类),改造如下:
model_ft = models.resnet18(pretrained=False)
num_ftrs = model_ft.fc.in_features
model_ft.fc = nn.Linear(num_ftrs, 2)
model_ft = model_ft.to(device)
criterion = nn.CrossEntropyLoss()
# Observe that all parameters are being optimized
optimizer_ft = optim.SGD(model_ft.parameters(), lr=0.001, momentum=0.9)
# Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
model_ft = train_model(model_ft, criterion, optimizer_ft, exp_lr_scheduler,
num_epochs=25)
最终结果如下:

DIY的效果优于resnet18。
代码请参考https://github.com/guxiaowei1/DIYresnet-NST