yolov3中loss函数的探索(一):ori-darknet、giou-darknet
yolov3中loss函数的探索
知识补丁
1.交叉熵
(p(xi):真实分布概率;q(xi):预测分布概率)
在机器学习中,我们需要评估label和predicts之间的差距,使用KL散度刚刚好,由于KL散度中的前一部分熵不变,故在优化过程中,只需要关注交叉熵就可以了。所以一般在机器学习中直接用用交叉熵做loss,评估模型。
交叉熵是用来评估当前训练得到的概率分布与真实分布的差异情况。
它刻画的是实际输出(概率)与期望输出(概率)的距离,也就是交叉熵的值越小,两个概率分布就越接近。
详情请参考:https://blog.csdn.net/tsyccnh/article/details/79163834
2.MSE:
均方误差loss函数:是求一个batch中n个样本的n个输出与期望输出的差的平方的平均值。

3.激活函数与loss函数的关系
softmax激活函数应用于多类分类–categorical_crossentropy交叉熵损失函数
softmax激活函数:

categorical_crossentropy交叉熵损失函数:
假设神经网络模型的最后一层的全连接层输出的是一维向量logits=[1,2,3,4,5,6,7,8,9,10],这里假设总共类别数量为10,使用softmax分类器完成多类分类问题,并将损失函数设置为categorical_crossentropy损失函数:
首先用softmax将logits转换成一个概率分布,然后取概率值最大的作为样本的分类 。softmax的主要作用其实是在计算交叉熵上,将logits转换成一个概率分布后再来计算,然后取概率分布中最大的作为最终的分类结果,这就是将softmax激活函数应用于多分类中。
sigmoid激活函数应用于多标签分类–binary_crossentropy交叉熵损失函数
sigmoid激活函数:
binary_crossentropy交叉熵损失函数:

sigmoid一般不用来做多类分类,而是用来做二分类,它是将一个标量数字转换到[0,1]之间,如果大于一个概率阈值(一般是0.5),则认为属于某个类别,否则不属于某个类别。这一属性使得其适合应用于多标签分类之中,在多标签分类中,大多使用binary_crossentropy损失函数。它是将一个标量数字转换到[0,1]之间,如果大于一个概率阈值(一般是0.5),则认为属于某个类别。本质上其实就是针对logits中每个分类计算的结果分别作用一个sigmoid分类器,分别判定样本是否属于某个类别同样假设,神经网络模型最后的输出是这样一个向量logits=[1,2,3,4,5,6,7,8,9,10], 就是神经网络最终的全连接的输出。这里假设总共有10个分类。
sigmoid应该会将logits中每个数字都变成[0,1]之间的概率值,假设结果为[0.01, 0.05, 0.4, 0.6, 0.3, 0.1, 0.5, 0.4, 0.06, 0.8], 然后设置一个概率阈值,比如0.3,如果概率值大于0.3,则判定类别符合,那么该输入样本则会被判定为类别3、类别4、类别5、类别7及类别8。即一个样本具有多个标签。
详情请参考:
https://blog.csdn.net/uncle_ll/article/details/82778750
https://blog.csdn.net/koreyoshichen/article/details/84823636
darknet-yolov3 loss函数
源码中loss函数的实现形式:
1.先计算各个维度的delta值;
2.计算各个维度的delta的平方和。
1.在目标检测任务里,有几个关键信息是需要确定的: (x,y),(w,h),class,confidence。
delta(x,y,w,h)如下代码:
float delta_yolo_box(box truth, float *x, float *biases, int n, int index, int i, int j, int lw, int lh, int w, int h, float *delta, float scale, int stride)
{
box pred = get_yolo_box(x, biases, n, index, i, j, lw, lh, w, h, stride);
float iou = box_iou(pred, truth);
float tx = (truth.x*lw - i);
float ty = (truth.y*lh - j);
float tw = log(truth.w*w / biases[2*n]);
float th = log(truth.h*h / biases[2*n + 1]);
delta[index + 0*stride] = scale * (tx - x[index + 0*stride]);
delta[index + 1*stride] = scale * (ty - x[index + 1*stride]);
delta[index + 2*stride] = scale * (tw - x[index + 2*stride]);
delta[index + 3*stride] = scale * (th - x[index + 3*stride]);
return iou;
}注解:

x,y,w,h采用的是MSE均方误差损失函数。
delta(class)如下代码:
void delta_yolo_class(float *output, float *delta, int index, int class, int classes, int stride, float *avg_cat)
{
int n;
if (delta[index]){
delta[index + stride*class] = 1 - output[index + stride*class];
if(avg_cat) *avg_cat += output[index + stride*class];
return;
}
for(n = 0; n < classes; ++n){
delta[index + stride*n] = ((n == class)?1 : 0) - output[index + stride*n];
if(n == class && avg_cat) *avg_cat += output[index + stride*n];
}
}注解:
论文如下:

1.但是源代码中还是应用的MSE损失函数????
有一种解释:对于Logistic回归,正好方差损失和交叉熵损失的求导形式是一样的,作者这里直接用方差损失代替了,因为数值趋势上是一样的。可参考(https://blog.csdn.net/jasonzzj/article/details/52017438)
2.delta[index]是否为0的判断????
因为选用的为sigmod-loss损失函数,具体请参考:
https://blog.csdn.net/jiyangsb/article/details/81976090
delta(confidence)如下代码:
for (b = 0; b < l.batch; ++b) {
for (j = 0; j < l.h; ++j) {
for (i = 0; i < l.w; ++i) {
for (n = 0; n < l.n; ++n) {
...
//负样本目标confidence
int obj_index = entry_index(l, b, n*l.w*l.h + j*l.w + i, 4);
avg_anyobj += l.output[obj_index];
l.delta[obj_index] = 0 - l.output[obj_index];
if (best_iou > l.ignore_thresh) {
l.delta[obj_index] = 0;
}
if (best_iou > l.truth_thresh) {
l.delta[obj_index] = 1 - l.output[obj_index];
...
}
}
}
}
for(t = 0; t < l.max_boxes; ++t){
...
int mask_n = int_index(l.mask, best_n, l.n);
if(mask_n >= 0){
...
//正样本目标confidence
int obj_index = entry_index(l, b, mask_n*l.w*l.h + j*l.w + i, 4);
avg_obj += l.output[obj_index];
l.delta[obj_index] = 1 - l.output[obj_index];
...
}
}
}注解:
ignore_thresh:当框的iou大于忽略阈值时,此框不在参与负样本的loss计算, l.delta[obj_index] = 0。
可以看出,此处也为Mse损失函数。
2.计算均方差:
*(l.cost) = pow(mag_array(l.delta, l.outputs * l.batch), 2);注解:
float mag_array(float *a, int n)
{
int i;
float sum = 0;
for(i = 0; i < n; ++i){
sum += a[i]*a[i];
}
return sqrt(sum);
}Keras-yolov3 loss函数
损失函数如下所示:
xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(raw_true_xy, raw_pred[..., 0:2],from_logits=True)
wh_loss = object_mask * box_loss_scale * 0.5 * K.square(raw_true_wh - raw_pred[..., 2:4])
confidence_loss = object_mask * K.binary_crossentropy(object_mask, raw_pred[..., 4:5], from_logits=True) + (1 - object_mask) * K.binary_crossentropy(object_mask, raw_pred[..., 4:5],from_logits=True) * ignore_mask
class_loss = object_mask * K.binary_crossentropy(true_class_probs, raw_pred[..., 5:], from_logits=True)
xy_loss = K.sum(xy_loss) / mf
wh_loss = K.sum(wh_loss) / mf
confidence_loss = K.sum(confidence_loss) / mf
class_loss = K.sum(class_loss) / mf
loss += xy_loss + wh_loss + confidence_loss + class_loss注解:
binary_crossentropy:二进制交叉熵损失函数;
square:均方差损失函数。
损失函数:
xy_loss:中心点的损失值。object_mask是y_true的第4位,即是否含有物体,含有是1,不含是0。box_loss_scale的值,与物体框的大小有关,2减去相对面积,值得范围是(1~2)。binary_crossentropy是二值交叉熵。
wh_loss:宽高的损失值。除此之外,额外乘以系数0.5,平方K.square()。
confidence_loss:框的损失值。两部分组成,第1部分是存在物体的损失值,第2部分是不存在物体的损失值,其中乘以忽略掩码ignore_mask,忽略预测框中IoU小于阈值的框。
class_loss:类别损失值。
将各部分损失值的和,除以均值,累加,作为最终的图片损失值。
详情请参考:https://blog.csdn.net/weixin_33725722/article/details/87985552
Pytorch-yolov3 loss函数
损失函数如下所示:
#顾名思义这里的x,y,z,w都是采用的最小均方差来评判误差
#位置损失
loss_x = self.mse_loss(x[obj_mask], tx[obj_mask])
loss_y = self.mse_loss(y[obj_mask], ty[obj_mask])
loss_w = self.mse_loss(w[obj_mask], tw[obj_mask])
loss_h = self.mse_loss(h[obj_mask], th[obj_mask])
#置信度损失,即有没有这个物体的概率
#bce_loss:二进制交叉熵
loss_conf_obj = self.bce_loss(pred_conf[obj_mask], tconf[obj_mask])
loss_conf_noobj = self.bce_loss(pred_conf[noobj_mask], tconf[noobj_mask])
loss_conf = self.obj_scale * loss_conf_obj + self.noobj_scale * loss_conf_noobj
#分类的损失 二分类交叉熵,bce_loss其实是个迭代器计算所有的误差然后求和。
loss_cls = self.bce_loss(pred_cls[obj_mask], tcls[obj_mask])
#all
total_loss = loss_x + loss_y + loss_w + loss_h + loss_conf + loss_cls
Giou-loss函数
1.简介:
论文:《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》
IoU是检测任务中最常用的指标,由于IoU是比值的概念,对目标物体的scale是不敏感的。然而检测任务中的BBox的回归损失(MSE loss, l1-smooth loss等)优化和IoU优化不是完全等价的(见下图)。
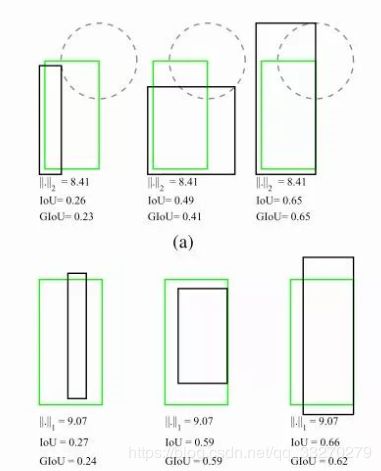
而且 Ln 范数对物体的scale也比较敏感。这篇论文提出可以直接把IoU设为回归的loss。然而有个问题是IoU无法直接优化没有重叠的部分。为了解决这个问题这篇paper提出了GIoU的思想。
假如现在有两个任意性质 A,B,我们找到一个最小的封闭形状C,让C可以把A,B包含在内,然后我们计算C中没有覆盖A和B的面积占C总面积的比值,然后用A与B的IoU减去这个比值:

损失函数:

2.在darknet中实现:
开源项目:https://github.com/generalized-iou/g-darknet
工程优化:
1.工程变动:
cfg文件:
loss函数的类型可以通过文件中的iou_loss选项进行选择,在.cfg中的每[yolo]一层上指定。当前的有效选项是:[iou|giou|mse]
iou_loss=mse #原始darknet loss函数类型(全部mse)
iou_loss=iou #x,y,w,h由mse损失函数换位box的iou-loss,confidence和class用mse。
iou_loss=giou #x,y,w,h由mse损失函数换位box的giou-loss,confidence和class用mse。新增不同维度loss函数的权重参数,表征其在总loss的重要程度,在.cfg中的每[yolo]一层上指定。具体如下:
cls_normalizer=1 #class和confidence的权重参数,默认值1
iou_normalizer=0.5 #box-iou的权重参数,默认值1。
#通过验证,以上参数的初始化为最优。data文件:
classes= 22
train = ../train.txt
valid = ../valid.txt
names = data/xxx.names
backup = backup
prefix = giou #新增输出前缀参数。数据增强:
用AlexeyAB’s fork中的OpenCV实现的方式替换了原darknet中的数据加载和增强的方式。
数据增强函数在g-darknet\src\image_opencv.cpp中的image image_data_augmentation()。
注:其余操作与原darknet一致,请参考《yolov3的环境搭建与应用》,该工程剩余新增功能暂不做尝试
2.试验对比:
论文结果:

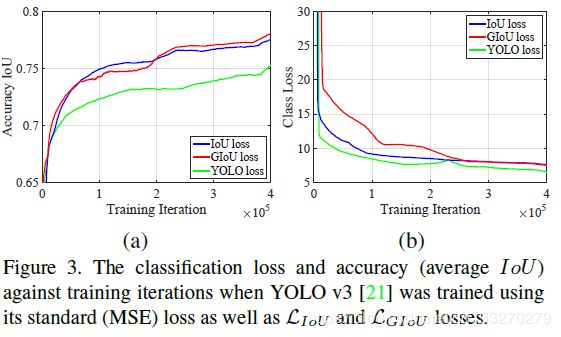
使用LGIoU损失时,YOLO v3的定位精度会大大提高(图3(a))。 然而,class不是最佳的(图3(b))。 由于AP受定位精度影响较小,受分类性能影响较大,所以修改cls_normalizer、iou_normalizer,对检测效果的影响较大。
实验结果:
1.Giou的Map低于Mse。
2.Giou的定位精度稍好于Mse。
原因如figure3注解。