USART串口控制外设
#include “stm32f10x.h”
#include “LQ12864.h”
#include “adc.h”
#include
#include “bsp_clkconfig.h”
#include “bsp_mcooutput.h”
#include “bsp_SysTick.h”
#include “usart.h”
void main_delay(u32 ms)
{
int i, j;
for(i = 0; i < ms; i++)
{
for(j = 0; j < 1000; j++)
{
}
}
}
//定义函数,串口初始化
void uart_config(){
//创建USART串口(USART1串口)类型的初始化结构体变量
USART_InitTypeDef USART_InitStructure;
//创建GPIO引脚配置结构体变量
GPIO_InitTypeDef GPIO_InitStructure;
//使能GPIOA组的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//参数1:RCC_APB2Periph_GPIOA是GPIOA组标示
//参数2: ENABLE使能时钟的状态
//使能GPIOA重映射功能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//参数1:RCC_APB2Periph_AFIO GPIO引脚复用标示
//参数2:使能状态ENABLE
//使能片上外设串口USART1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//参数1:RCC_APB2Periph_USART1 片上外设的标示
//参数2:使能状态ENABLE
//stm32 片上外设USART1 发送 引脚 TX -复用、重新映射-> GPIO PA9(模式是复用推挽)
//设置GPIO 引脚的模式(PA9模式)
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
//设置引脚号
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
//设置引脚的工作的频率
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//初始化PA9引脚
GPIO_Init(GPIOA, &GPIO_InitStructure);
//参数1:GPIO组标示
//参数2:引脚配置结构体变量
//stm32 片上外设USART1 接收 引脚 RX -复用、重新映射-> GPIO PA10(模式是浮空输入)
//设置GPIO浮空输入模式
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
//设置引脚号
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
//初始化PA10引脚
GPIO_Init(GPIOA, &GPIO_InitStructure);
//配置串口
//设置串口波特率:9600位/秒
USART_InitStructure.USART_BaudRate = 9600;
//设置串口USART1数据包里面的数据位:8位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
//设置数据发送完成数据停止位:1位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
//设置校验:无,数据包小 无需校验USART_Parity_No
USART_InitStructure.USART_Parity = USART_Parity_No;
//设置硬件流控制:无控制USART_HardwareFlowControl_None
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None//设置串口的模式:输入模式、输出模式
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
//初始化串口信息
USART_Init(USART1, &USART_InitStructure);
//参数1:串口的标示
//参数2:串口的配置信息
//使能串口
USART_Cmd(USART1, ENABLE);
//参数1:串口标示USART1
//参数2:使能串口
}
int main(void)
{
uint16_t val;
int i = 0 ;
char buf[100] = { 0 };
RCC_ClocksTypeDef RCC_Clocks; //时钟结构体
HSE_SetSysClock(RCC_PLLMul_2); //16Mhz,库函数默认多数为72MHZ。此处设置为16M,主要是因为发现72M时proteus仿真串口容易出现乱码。
delay_init() ;
LCD_Init() ;
Adc_Init();
//调用函数,串口初始化
uart_config();
//格式化输出内容到串口
printf(“input data : “);
//格式化输入函数到串口
scanf(”%s”, buf);
//输出输入的内容buf
printf(“get data : %s\r\n”, buf);
//\r:回车,光标到行首
//\n:换行,光标到下一行
while(1)
{
}
}

#include “stm32f10x.h”
#include “LQ12864.h”
#include “adc.h”
#include
#include “bsp_clkconfig.h”
#include “bsp_mcooutput.h”
#include “bsp_SysTick.h”
#include “usart.h”
void main_delay(u32 ms)
{
int i, j;
for(i = 0; i < ms; i++)
{
for(j = 0; j < 1000; j++)
{
;
}
}
}
void uart_config(){
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
//GPIO_InitTypeDef init;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//init.GPIO_Mode = GPIO_Mode_Out_PP;
//init.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
//init.GPIO_Speed = GPIO_Speed_50MHz;
//GPIO_Init(GPIOA,&init);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
//GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1,ENABLE);
//GPIO_SetBits(GPIOA,GPIO_Pin_1);
//GPIO_SetBits(GPIOA,GPIO_Pin_2);
}
void fan_init(){
GPIO_InitTypeDef init;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
init.GPIO_Pin = GPIO_Pin_8;
init.GPIO_Mode = GPIO_Mode_Out_PP;
init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &init);
GPIO_SetBits(GPIOA, GPIO_Pin_8);
}
void buzzer_init(){
GPIO_InitTypeDef init;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
init.GPIO_Pin = GPIO_Pin_2;
init.GPIO_Mode = GPIO_Mode_Out_PP;
init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &init);
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
void led_init(){
GPIO_InitTypeDef init;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
init.GPIO_Pin = GPIO_Pin_15;
init.GPIO_Mode = GPIO_Mode_Out_PP;
init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &init);
GPIO_SetBits(GPIOA, GPIO_Pin_15);
}
int main(void)
{
uint16_t val;
int i = 0 ;
char buf[100] = { 0 };
RCC_ClocksTypeDef RCC_Clocks;
HSE_SetSysClock(RCC_PLLMul_2);
delay_init() ;
LCD_Init() ;
Adc_Init();
uart_config();
fan_init();
led_init();
buzzer_init();
while(1)
{
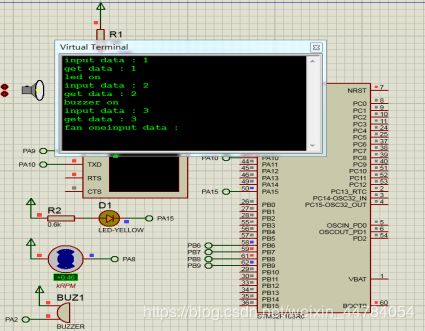
printf("input data :");
scanf("%s",buf);
printf("get data : %s\r\n", buf);
if(buf[0]=='1'){
printf("len on\r\n");
GPIO_ResetBits(GPIOA, GPIO_Pin_15);
}
if(buf[0]=='2'){
printf("buzzer on\r\n");
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
if(buf[0]=='3'){
printf("fan on\r\n");
GPIO_ResetBits(GPIOA, GPIO_Pin_8);
}
}
}