无人机设计中的下一个进化步骤
据一些人说,无人驾驶飞机(UAV)的商业意义,或无人驾驶飞机,因为他们更为人所知,可能和互联网一样重要。高调的应用如航空摄影和录像,这在很大程度上被民主化的无人机,有群众诉求和相应的高容量。更为深奥的用途包括农业管理,在医疗应用中,它们的使用预计会增加。
“无人机作为一种服务”的概念已经出现,因为公司为企业提供了一个交钥匙解决方案。澄清围绕立法可以说是帮助而不是阻碍了新兴产业,虽然整体的有效载荷的限制,但他们的优势是有保证。亚马逊和脸谱网等大型组织正在积极开发利用无人驾驶飞机在偏远地区运送货物和互联网连接的计划。
这些新出现的应用将越来越依赖自主性,因此,无人机可能成为完全融入社会的真正自主车辆的第一种形式。这是一个活跃的研究领域,商业系统已经出现,如家庭监控无人驾驶飞机,可以自主导航建筑物的周边时,检测到的运动,并转播它看到的房主在互联网上。
作为无人驾驶,无人机也不受限制;紧凑的系统,包括电源、处理、和有效载荷。为了真正有用,即使在危险多变的天气条件下,它们也必须保持稳定和高效。为了尽可能长时间地在一次充电中运行,他们不可避免地需要能够自己充电以便能够重新充电,使他们几乎无限期地自主操作。这一级别的精确控制和导航正在创造对新技术的需求,并强调了两项最关键的特性:马达控制和导航。
电子速度控制
作为一个系统,无人机可以用飞行控制器、电子调速器、蓄电池和有效载荷等功能元件来描述。ESC是独立的,但仍然由飞行控制器管理。这主要是因为它是一种从专用解决方案中获益的复杂函数。
ESC负责控制每个电动机的速度,因此,每个电动机通常有一个专用ESC。为了协调它们的操作,所有ESCs必须能够通过飞行控制器直接或间接地相互通信;在一个典型的无人机中,可能有四个胚胎干细胞和四个马达。ESC已经成为一个卓越的领域,经常被作为一个完整的子系统呈现,可以很容易地集成,并且现在有一个小但越来越多的ESC解决方案。
由于无人机技术的稳定性和效率是至关重要的,因此控制马达的方式对无人驾驶飞机的操作至关重要。的方法,许多ESC供应商采用磁场定向控制(FOC),一个控制电机的转矩技术,通过它,速度。实施的时候,FOC提供加速度快速变化而不引入不稳定,使无人机的同时最大化效率执行复杂的动作。驱动矢量的快速计算是至关重要的矢量控制,这就是为什么它已成为针对电机控制一般微控制器供应商的关注,特别是与胚胎干细胞。
无人驾驶飞机最受欢迎的电机形式是无刷直流电动机,因为它体积小,成本相对较低,而且经久耐用。为了进一步降低材料清单,无人机制造商通常采用无传感器拓扑结构,也就是说,电机的位置是通过监测电动机的状态而不是转子的位置来确定的。通过矢量控制算法的无位置传感器无刷直流电机的控制是复杂的,而另一个原因是交钥匙解决方案已开始从领先的单片机厂商崭露头角。
一个例子是steval-esc001v1电子调速控制器(ESC)从意法半导体,它汇集了意法半导体的stm32f303cbt7单片机及其l6398驱动器和功率MOSFET stl160ns3llh7电机控制SDK。它们共同构成驱动三相无刷电机完整的解决方案,无论是无刷直流电机或永磁同步电机(永磁同步电机的无速度传感器矢量控制算法)使用。功率MOSFET沟道30 V,160的STripFET H7设备。该设计可以提供最大的RMS电流为20 A,这足以驱动专业无人驾驶飞机使用的电机。图1显示了解决方案的框图。
STMicroelectronics指出,免费使用,而不是一个梯形控制算法中使用的一些ESCs,提供更好的扭矩控制,而实现它提供还提供了主动制动和减速时的能量回收。
意法半导体的steval-esc001v1电子速度控制方案框图
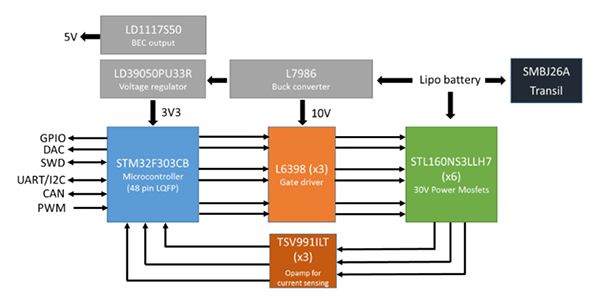
图1:意法半导体的steval-esc001v1电子速度控制解决方案基于磁场定向控制的框图,这是开发无人机。
填充板的尺寸小于30毫米,60毫米,如图2(顶部)和图3(底部侧)所示,突出显示关键功能部件。
意法半导体steval-esc001v1图像(顶部)
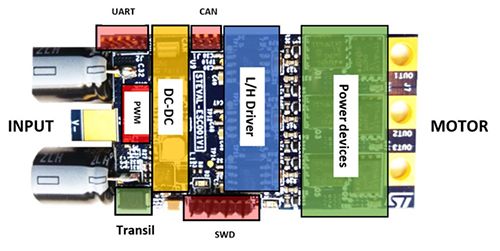
图2:这steval-esc001v1(顶部)。
意法半导体steval-esc001v1图像(底部)
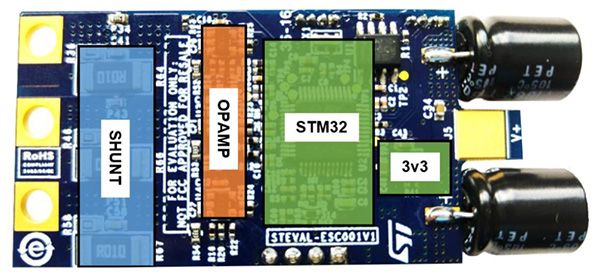
图3:这steval-esc001v1(底部)。
评估板是使用ST程序/编程器来编程的,固件可以使用ST电机控制工作台配置(可以使用MC Workbench的简短视频介绍)。使用这个软件和评估板,工程师可以配置电机和编译所需的驱动电机的固件。当驱动电机的每个相位的信号由电路板计算和应用时,用PWM信号来设定电机的转速。如图4所示,在1060至1860微米之间的脉冲被用来将马达速度设置在最小值和最大值之间。
用于调节电机转速的pwm信号图
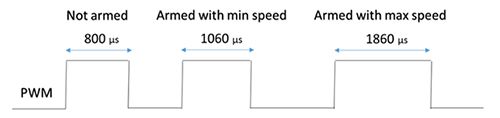
图4:用来调节的steval-esc001v1控制电动机转速的PWM信号。
ESC的参考设计
一般来说,电机控制对于许多半导体制造商来说,是一个越来越重要的应用领域,尤其是那些具有强大的微控制器组合的应用领域。这包括德克萨斯仪器,已开发和产品化的解决方案,提供一个免费预装在选择Piccolo MCUs的ROM和通过API。
如果没有传感器来提供关于电动机位置的反馈,那么选择的方式是在开环配置中运行电动机或使用其他形式的反馈。需要注意的是,闭环配置提供了更大的控制,并导致更好的整体性能。提供闭环操作所需的反馈属于一个称为观测器的专用固件函数,它利用电机绕组中产生的反电势来估计其位置。由于这个原因,固件也称为估计器。
在TI的解决方案,估计固件被称为InstaSPIN快,即流量、角度、速度和转矩。快速被描述为一个通用的三相电机软件编码器,能够工作在一系列的电机实现,包括同步和异步直流和交流电机。它是由FOC转矩控制器软件,InstaSPIN-FOC,形成钛的motorware软件包的一部分;一个免费使用,免费下载的解决方案。然而,该解决方案的一部分是专有的,只提供基于ROM的代码支持MCU;而InstaSPIN-FOC可执行从RAM或闪存,快速算法必须执行从罗
高速无传感器矢量参考设计无人机的胚胎干细胞从德克萨斯仪器提供了一个简单的方法来评估InstaSPIN技术。它是基于C2000 Piccolo Launchpad launchxl-f28069m开发板(图5)和drv8305evm三相电机驱动器BoosterPack评价模块(图6)。
德克萨斯仪器C2000 Piccolo Launchpad launchxl-f28069m开发板的图像
图5:C2000 Piccolo Launchpad launchxl-f28069m开发板(图片来源:凯利讯半导体)。
德克萨斯仪器drv8305evm三相电机驱动器BoosterPack评价模块的图像
图6:这drv8305evm三相电机驱动器BoosterPack评价模块(图片来源:凯利讯半导体)。
在这样一个竞争激烈的环境中,与易用性相匹配的性能往往是非常有说服力的理由来选择一种特定的解决方案,在这方面TI已竭尽全力从竞争中脱颖而出。例如,控制算法需要了解控制电机的某些参数,但TI坚持认为,它的解决方案需要提供较少的电机参数,即不需要数据表。此外,一旦电机已被确定,该InstaSPIN-FOC和快速的解决方案不需要调整,不像大多数其他的解决方案。
估计的准确性是另一个重要的参数,在这里,TI说,它的解决方案可以开始跟踪在一个电周期,可以保持在低于1赫兹的精度;其他解决方案通常只在5赫兹以上的频率准确,并可能在高频率妥协。这些好处还意味着,TI的解决方案可以提供100%扭矩启动,完全稳定在零速度。
开发平台和交钥匙解决方案的可用性意味着现在可以更容易地开始使用无人机设计。TI认为,其解决方案可以启动和运行在两分钟,强调先进的矢量控制方案已经在很短的时间内。然而,导航也不一定如此,但它正在迅速发展,而且很快就会有解决方案,可以为所有种类的无人车辆提供完全自主导航。
差分GNSS
导航主要是复杂的一件事:障碍。没有任何障碍可以避免,汽车已经是自驾车,但事实是,从A点到B点将是简单得多,如果它是一条直线,没有任何之间的。幸运的是,在天空中,这是常有的事。出于这个原因,自主无人驾驶飞机很可能比后来的时间更常见。当然,仍然需要考虑碰撞检测和避障技术,但总的来说,飞的物体比不飞的物体有很大的优势。
全球导航卫星系统(GNSS)的使用现在是导航的同义词,当与地图软件一起使用时,它将成为一个强大的组合。然而,全球导航卫星系统是众所周知的,只有精确到米内,而不是厘米,这是必要的自主无人驾驶飞机,可能本身测量不到一米。对于某些应用,如大面积露天或多公里地面石油管道的检查,这是可以接受的。对于新出现的无人驾驶飞机应用,如货物交付,将需要更高的精确度。
如果没有支持这种精确度的基础设施,自主设备将依靠机器视觉帮助他们导航真实世界。然而,出现了一些解决方案,提供了与某些应用程序相适应的精确度。他们采用差分GNSS(DGPS),采用修正的数据由一个基站的完善和正确定位数据通过移动对象派生,简称虎。
该技术被称为实时动态(RTK)和被国际认可的标准组织的海事服务无线电技术委员会(RTCM)定义。它依赖于基站与漫游者之间的实时通信通道,最常用于高端测量设备。然而,该技术正开始在以大众市场解决方案为定位的模块中实现。一个例子是从u-blox GNSS定位模块,包括neo-m8p-0和neo-m8p-2模块,旨在使探测器和基站,分别。
该公司声称,这些模块的设计是为了满足一般无人驾驶车辆的需求,但包括使它们特别适用于无人机的特性,如移动基线模式;使基站能够移动以及漫游者的功能。这可能与运载式无人驾驶飞机有关,它将从一个更大、更传统的运载工具向邻近地区发射。
该模块是基于u-blox M8 GNSS接收机,并与GPS兼容,GLONASS和BeiDou卫星导航网络,并且能够使用GPS和GLONASS和北斗的同时,提供更快的首次定位时间。然而,u-blox指出如果RTK的更新速度是至关重要的,那么他们应该只使用GPS模式。图7说明了模块是如何操作的。
u-blox的neo-m8p模块创建一个差分求解图像
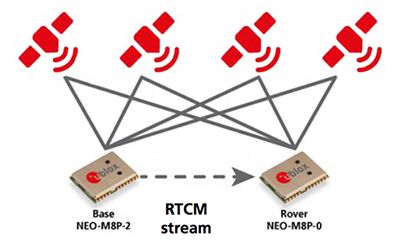
图7:采用了u-blox neo-m8p模块来创建一个差分求解厘米级定位精度。
基站供应车一股RTCM 3消息(参考站参数)。然后,探测器必须解决载波相位模糊,此时它可以进入RTK固定模式,并开始实现厘米精确定位数据。根据u-blox,这个过程一般不超过60秒,被称为收敛时间。月球车将进入RTK固定模式时,接收机具有能见度至少六颗卫星的连续相锁;如果与GLONASS系统同时工作,它需要从第二系统的至少两个卫星是可见的,并与BeiDou增加至三。
当在RTK模式下运行时,漫游者的位置相对于基站位置报告。因此,月球车的绝对位置将参照基站的绝对位置和月球车相对于它的位置。这也适用于无人驾驶飞机需要返回充电站以充电的相关应用。当基站在移动基线模式下工作时,其绝对位置不再固定。然而,漫游者仍然可以保持厘米精确的定位相对于它,这是适用于当无人驾驶飞机是在“跟随我”模式,例如。随着差分定位的介绍,完全自主的无人机概念确实开始形成。
结论
自主和稳定将是明天无人驾驶飞机的主要特点。如FOC的电机控制和差分成为更综合的技术,无人机的快速和持续的发展是有保证的。像这里所提供的预集成解决方案的可用性使先进无人机的开发过程变得更简单,为原始设备制造商提供了利用激动人心的新可能性的机会。