基于轮廓调整的SOTA实例分割方法,速度达32.3fps | CVPR 2020


作者 | VincentLee
来源 | 晓飞的算法工程笔记
 介绍
介绍
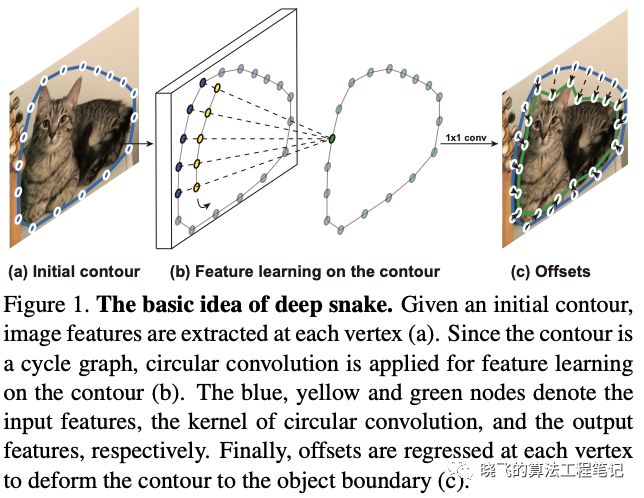
实例分割是许多计算机视觉任务中的重要手段,目前大多数的算法都采用在给定的bbox中进行pixel-wise分割的方法。受snake算法和Curve-GCN的启发,论文采用基于轮廓的逐步调整策略,提出了Deep snake算法进行实时实例分割,该算法将初始轮廓逐渐优化为目标的边界,如图1所示,达到很好的性能且依然保持很高的实时性(32.3fps) 。 论文的主要贡献如下:
提出基于学习的snake算法用于实时实例分割,对初始轮廓调整至目标边界,并且引入循环卷积(circular convolution)进行轮廓特征的学习。
提出two-stage流程进行实例分割,先初始化轮廓再调整轮廓,两个步骤均可以用于修正初始定位的误差。
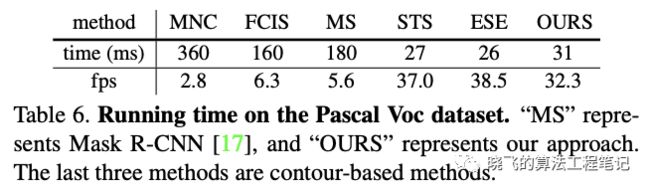
Deep snake能在多个实例分割数据集上达到SOTA,对于512的图片输入能达到32.3fps。
 方法
方法
Deep snake方法将初始轮廓逐渐优化为目标的边界来进行目标分割,即将物体轮廓作为输入,基于CNN主干特征预测每个顶点的偏移量。为了充分利用轮廓拓扑结构,论文使用循环卷积(circular convolution)进行顶点特征的学习,有助于学习轮廓的优化,并基于deep snake提出了一套实时实例分割的流程。
Learning-based snake algorithm
传统的snake算法将顶点的坐标作为变量来优化人工设计的能量函数(energy function),通过最小化能量函数来拟合目标边界。由于能量函数通常是非凸的,而且需要基于低维图像特征进行人工设计,通常会陷于局部最优解。
而deep snake则是直接从数据学习如何微调轮廓,对于 个顶点 ,首先构造每个顶点的特征向量,顶点 的特征 为对应的网络特征和顶点坐标的concate ,其中 为主干网络输出的特征图, 为顶点 处的双线性差值输出,附加的 用于描述顶点间的位置关系, 是平移不变的,由每个顶点坐标减去轮廓中所有顶点的最小 和 得到相对坐标。


在获得顶点特征后,需要对轮廓特征进一步学习,顶点的特征可以视作1-D离散信号 ,然后使用标准卷积对顶点逐个进行处理,但这样会破坏轮廓的拓扑结构。因此,将顶点特征定义为公式1的周期信号,然后使用公式2的循环卷积进行特征学习, 为可学习的卷积核, 为标准卷积操作。
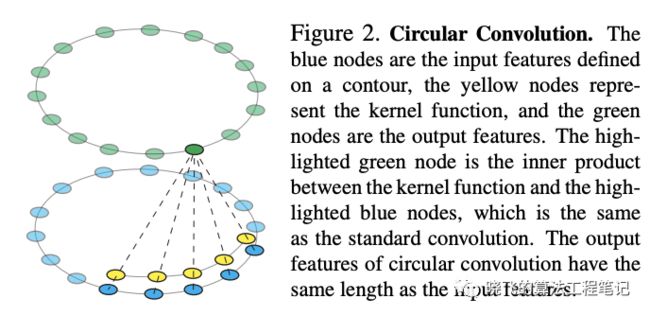
循环卷积操作如图2所示,与标准的卷积操作类似,可以很简单地集成到目前的网络中。在特征学习后,对每个顶点使用3个 卷积层进行偏移的输出,实验中循环卷积的核大小固定为9。
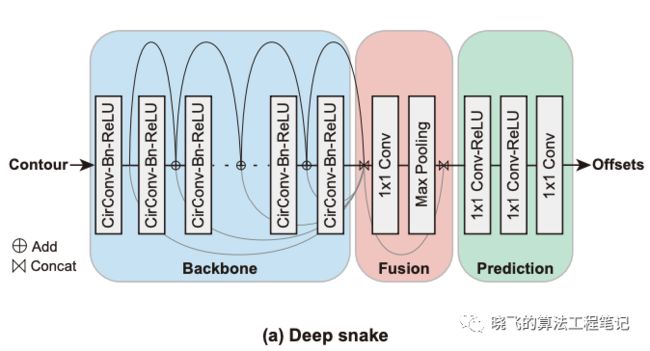
图a展示了deep snake的细节结构,输入为初始轮廓,主干包含8个"CirConv-Bn-ReLU"层,每层都使用残差连接,Fusion block用于融合主干网络中的多尺度轮廓特征,Prediction head使用3个 卷积输出每个顶点的偏移。
Deep snake for instance segmentation
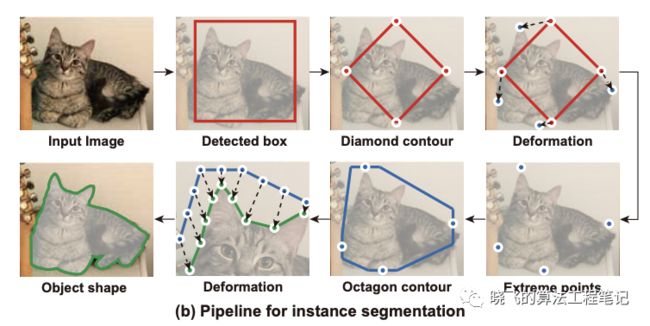
将deep snake加入到目标检测模型中进行实例分割,流程如图b所示。模型首先产生目标框,将其构建成菱形框,然后使用deep snake算法将菱形顶点调整为目标极点,构造八边形轮廓,最后进行迭代式deep snake轮廓调整得到目标形状
Initial contour proposal
论文采用ExtreNet的极点思想,能够很好地包围物体。在得到矩形框后,获取4条边的中心点 连成菱形轮廓,使用deep snake对菱形轮廓调整成极点 ,然后每个极点放置一条边,连接边构造多边形,每个极点的边为其对应的bbox边的 ,若边超过原bbox范围会被截断。在实际使用时,菱形轮廓输入deep snake前会平均上采样到40个点(有助于deep snake计算),但损失函数计算只考虑 的对应偏移
Contour deformation
对八边形平均采样 个点,将上极点 作为起点,同样地,GT轮廓对物体边缘平均采样 个点,将靠近 的点作为起点, 一般为128。如果顶点离GT很远,很难直接正确调整,于是采用迭代式地进行deep snake调整,实验采用的迭代次数为3次。
轮廓是目标空间位置的一种扩展表示方法,通过调整轮廓到物体边缘能够帮助解决detector的定位误差
Handling multi-component objects
由于遮挡,一个实例可能包含多个组件,然而一个轮廓只能勾勒出bbox内的一个组件。为了解决这个问题,使用RoIAlign来提取初始bbox特征,然后配合detector来检测组件的box,再对每个box进行上述的轮廓调整,最后结合初始bbox内相同类别的组件输出最终的物体形状。
 实现细节
实现细节
Training strategy

极点的损失函数如公式3, 为预测的极点。

迭代轮廓调整的损失函数如公式4, 为调整后的顶点, 为对应的GT边缘点。对于检测部分,则采用跟原检测函数一样的损失函数。
Detector
使用CenterNet作为检测器,对于物体检测,使用跟原来一样的设定输出类别相关的box,而对于组件检测,则使用类不可知的CenterNet,对于 的特征图,输出 的中心点heatmap和 的box大小特征图。
 实验
实验
Ablation studies

Baseline将轮廓视为图结构,然后使用GCN进行轮廓调整,初始轮廓为围绕bbox的椭圆,Arichitecture加入Fusion block,Initial proposal加入论文的轮廓初始化方法,最后是将GCN修改为循环卷积,可以看到每个步骤都对AP有提升。
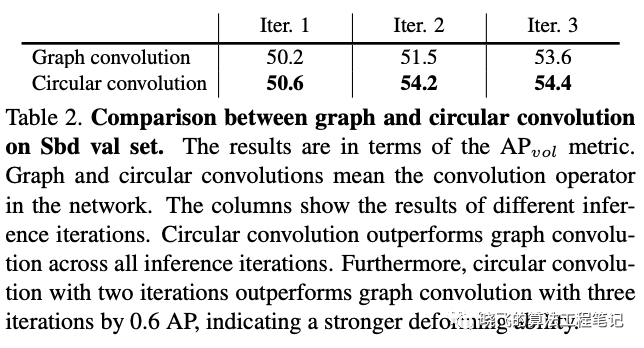
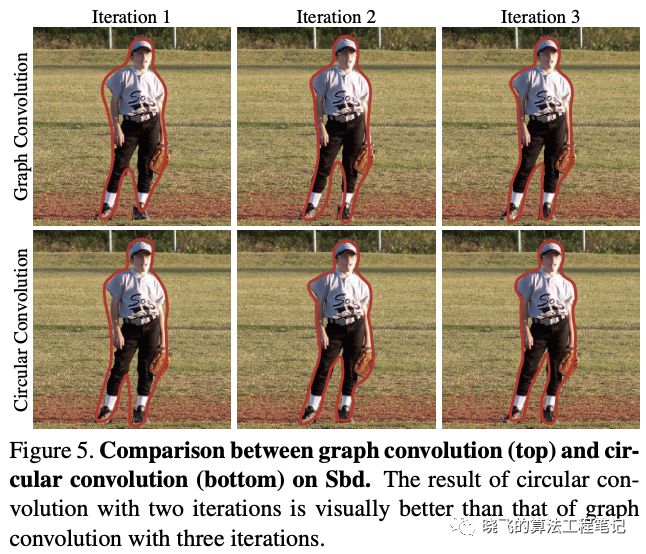
论文也对比了卷积类型以及迭代次数对结构的影响,可以看到循环卷积的结果比GCN要好。
Comparison with the state-of-the-art methods
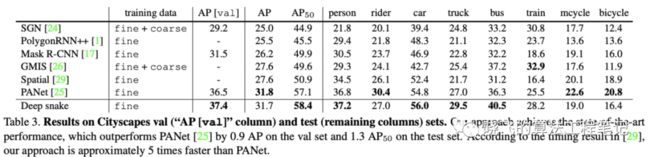
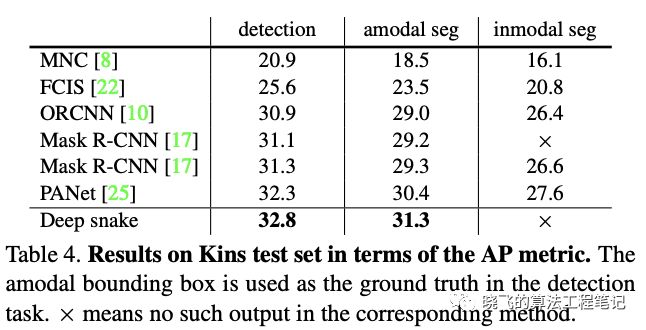

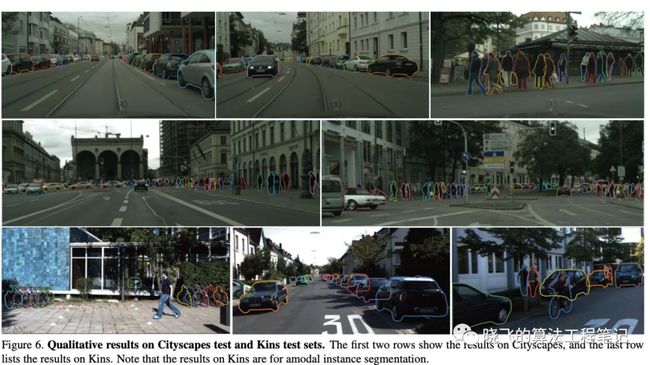

论文在不同的数据集上都取得了不错的效果,作者在每个数据集上的训练参数都有点不一样,具体参数可以看看原文
Running time
 结论
结论
论文提出基于轮廓的实例分割方法Deep snake,轮廓调整是个很不错的方向,引入循环卷积,不仅提升了性能还减少了计算量,保持了实时性,但是Deep snake的大体结构不够优雅,应该还有一些工作可以补。
论文地址:https://arxiv.org/abs/2001.01629
论文代码:https://github.com/zju3dv/snake/
参考内容
Snakes: Active Contour Models - http://www.cs.ait.ac.th/~mdailey/cvreadings/Kass-Snakes.pdf
Fast Interactive Object Annotation with Curve-GCN - https://arxiv.org/pdf/1903.06874.pdf
【end】
◆精彩推荐◆
推荐阅读百万人学AI:CSDN重磅共建人工智能技术新生态清华学霸组团的工业AIoT创企再获数千万融资:玩家应推动在边缘 AI 芯片上跑算法阿里文娱测试实战:机器学习+基于热度链路推荐的引流,让对比测试更精准另一种声音:容器是不是未来?1 分钟抗住 10 亿请求!某些 App 怎么做到的?| 原力计划探索比特币独特时间链、挖矿费用及场外交易的概念你点的每个“在看”,我都认真当成了AI