软件篇-03-基于ORB_SLAM2手写SLAM稠密地图构建实现
/-----------------------------------
本篇文章首发于知乎专栏
https://zhuanlan.zhihu.com/QIQI-HITwh
/---------------------------------------------------------------------------------
声明: 本文使用的方法不是从内部修改ORBSLAM2源码以获取稠密点云,而是先从ZED2
sdk获取以摄像头坐标系为描述的三维点云/作为点云地图的一个子集,然后融合IMU与ORB_SLAM2进行实时定位,通过点云滤波,点云融合建图。
以下是在室内实验的demo,由于是纯双目,没有深度传感器,在白墙和地板上有些失真,下次等移动平台到了我会去室外实验。
一、获取实时坐标和点云图
使用ORBSLAM2获取当前姿态,同时ZED2 利用其IMU数据对速度加速度积分得出另一个姿态,考虑到ORBSLAM2的响应及时性和IMU数据的漂移,当两者数据相差较大时停止建图,等待恢复正常,否则以ORB_SLAM2的姿态信息为准,同时手动添加损失量对IMU姿态信息进行校准。在某些情况下ORB_SLAM2可能会跟丢,此时通过IMU数据积分获取迪卡尔空间位移变化量,并回到之前的位置重新确定位置。
if(!startTimer)
{
timeLast = ros::Time::now().toSec();
startTimer = 1;
ROS_ERROR("\noffect between two poseMsgs is too big, stop mapping...");
ROS_WARN("the offset from zed2Pose to orbPose2 is:\nx:%f y:%f z:%f \n-------------"
,carTF_zed2.pose.position.x - carTF_orb.pose.position.x
,carTF_zed2.pose.position.y - carTF_orb.pose.position.y
,carTF_zed2.pose.position.z - carTF_orb.pose.position.z);
}else if(timeNow = ros::Time::now().toSec() - timeLast > 10)
{
startTimer = 0;
timeLast = timeNow = 0;
ROS_WARN("Don't warry, it seems that something wrong happend, trying to fix it...");
x_bias = carTF_zed2.pose.position.x - carTF_orb.pose.position.x;
y_bias = carTF_zed2.pose.position.y - carTF_orb.pose.position.y;
z_bias = carTF_zed2.pose.position.z - carTF_orb.pose.position.z;
}
这里我订阅ZED2 sdk输出的实时点云,有一点需要注意的是实时的点云和姿态信息必需要时间戳同步,不然融合出来的地图会发生很大的偏移和扭曲。使用ros message_filters管理消息同步,可以设置弱同步和强同步。
imu_sub = n.subscribe("/zed/zed_node/imu/data", 1, &MapBuild::imuCallback,this);
carTF_orb_sub = n.subscribe("/orb_slam2_stereo/pose", 1, &MapBuild::carTF_orb_Callback,this);
pointCloud_sub = new message_filters::Subscriber<sensor_msgs::PointCloud2>
( n, "/zed2/zed_node/point_cloud/cloud_registered", 1);
carTF_zed2_sub = new message_filters::Subscriber<geometry_msgs::PoseStamped>
(n, "/zed2/zed_node/pose", 1);
sync_ = new message_filters::Synchronizer<sync_pol> (sync_pol(10), *pointCloud_sub, *carTF_zed2_sub);
sync_->registerCallback(boost::bind(&MapBuild::buildMap_callback, this, _1, _2));
二、点云坐标系变换
我们当前的点云是相对摄像头坐标系的,但是建图就要将这些点转换到世界坐标系,点的坐标系变换我这里就不讲了,不懂的去看一下《机器人学导论》/题外话“英文的原汁原味”。要用到的工具当然是Eigen了。这里吐槽一下,Eigen和geometry_msgs::PoseStamped里有关四元数的写法顺序是颠倒的,大家注意一下。
Quaterniond quaternion(carTF_zed2.pose.orientation.w,
carTF_zed2.pose.orientation.x,
carTF_zed2.pose.orientation.y,
carTF_zed2.pose.orientation.z);
Matrix3d rotation_matrix;
rotation_matrix=quaternion.toRotationMatrix();
// transform the cloud link to the "map" frame
Vector3d position_transform
(carTF_zed2.pose.position.x - x_bias,
carTF_zed2.pose.position.y - y_bias,
carTF_zed2.pose.position.z - z_bias);
for (int i=0; i<cloud_xyz->width; i++)
{
Vector3d position_(cloud_xyz->at(i).x,cloud_xyz->at(i).y,cloud_xyz->at(i).z);
Vector3d position = rotation_matrix*position_ + position_transform;
cloud_xyz->at(i).x = position[0];
cloud_xyz->at(i).y = position[1];
cloud_xyz->at(i).z = position[2];
}
三、点云滤波
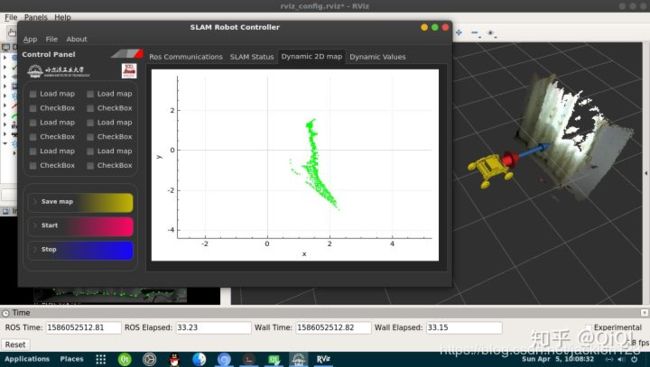 可以看到,图中绿色的点云原本是墙面和窗帘,但是在边缘却有很多飞点
可以看到,图中绿色的点云原本是墙面和窗帘,但是在边缘却有很多飞点
我们获取的原始点云有很多的噪声点并且密度太大,TX2吃不消,因此这里要对这些点云进行滤波,这里使用pcl的体素滤波和直通滤波。
// Perform the actual filtering
// VoxelGrid(decrease the memory occupation) & PassThrough(delete some incorrect points)
pcl::PCLPointCloud2* cloud2 = new pcl::PCLPointCloud2;
pcl::PCLPointCloud2ConstPtr cloudPtr(cloud2);
pcl_conversions::toPCL(*cloud, *cloud2);
// VoxelGrid
pcl::PCLPointCloud2* cloud_filtered_1 = new pcl::PCLPointCloud2;
pcl::PCLPointCloud2ConstPtr cloud_filter_1_Ptr(cloud_filtered_1);
pcl::VoxelGrid<pcl::PCLPointCloud2> filter_1;
filter_1.setInputCloud (cloudPtr);
filter_1.setLeafSize (0.03, 0.03, 0.03);
filter_1.filter(*cloud_filtered_1);
// PassThrough
pcl::PCLPointCloud2* cloud_filtered_2 = new pcl::PCLPointCloud2;
pcl::PCLPointCloud2ConstPtr cloud_filter_2_Ptr(cloud_filtered_2);
pcl::PassThrough<pcl::PCLPointCloud2> filter_2;
filter_2.setInputCloud (cloud_filter_1_Ptr);
filter_2.setFilterFieldName ("y");
filter_2.setFilterLimits (-1.2, 1.2);
// filter_2.setFilterLimitsNegative (true);
filter_2.filter(*cloud_filtered_2);
pcl::PCLPointCloud2 cloud_filtered_3;
filter_2.setInputCloud (cloud_filter_2_Ptr);
filter_2.setFilterFieldName ("z");
filter_2.setFilterLimits (-2, 2);
// filter_2.setFilterLimitsNegative (true);
filter_2.filter(cloud_filtered_3);
四、点云融合
// fused the current cloud to the fused cloud
*cloud_xyzFused += *cloud_xyz;
pcl::toROSMsg(*cloud_xyzFused, mPointcloudFusedMsg);
mPointcloudFusedMsg.header.frame_id = "map";
pointCloudFused_pub.publish(mPointcloudFusedMsg);
五、去除重复的点云
实验过程中不可避免的会回到某个之前来过的姿态,这个时候不能任由重复的点云在我的地图上大行其道,因此需要实时判断当前的点云是否已经添加到地图中去了,使用pcl::registration::CorrespondenceEstimation判断当前点云和地图有多少重复的点,该数目与点云总体数目之比如果大于某个阈值,则丢弃该点云。
pcl::registration::CorrespondenceEstimation<pcl::PointXYZRGB, pcl::PointXYZRGB> est;
cloud_xyzFusedPtr = cloud_xyzFused->makeShared();
cloud_xyzPtr = cloud_xyz->makeShared();
est.setInputSource (cloud_xyzPtr);
est.setInputTarget (cloud_xyzFusedPtr);
pcl::Correspondences all_correspondences;
// Determine all reciprocal correspondences
est.determineReciprocalCorrespondences (all_correspondences);
// filter the reciprocal points cloud
if(1.0*all_correspondences.size()/cloud_xyz->width < 0.9)
{
// fused the current cloud to the fused cloud
*cloud_xyzFused += *cloud_xyz;
pcl::toROSMsg(*cloud_xyzFused, mPointcloudFusedMsg);
mPointcloudFusedMsg.header.frame_id = "map";
pointCloudFused_pub.publish(mPointcloudFusedMsg);
}
我们下期再见
./下期就有小车实际的实验了