VINS_FUSION入门系列---GPS与VIO融合
参考的博客:https://blog.csdn.net/subiluo/article/details/105429471
http://www.luyixian.cn/news_show_313718.aspx
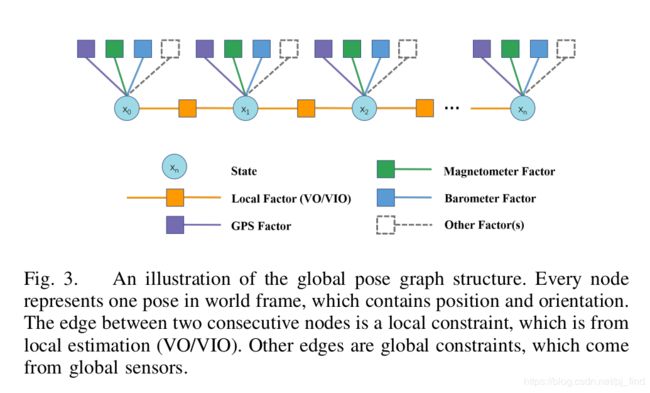
state: 状态量,位姿,速度,bias等
Local Factor: 局部观测约束,VIO相对位姿变换, 计算的是相邻两帧之间位姿的残差
1.代码的输入输出
输入输出的定义都在globalOptNode.cpp这个文件里面
ros::Subscriber sub_GPS = n.subscribe("/gps", 100, GPS_callback);
ros::Subscriber sub_vio = n.subscribe("/vins_estimator/odometry", 100, vio_callback);
pub_global_path = n.advertise("global_path", 100);
pub_global_odometry = n.advertise("global_odometry", 100);
pub_car = n.advertise("car_model", 1000);
vio的输入函数
void vio_callback(const nav_msgs::Odometry::ConstPtr &pose_msg)
{
//printf("vio_callback! \n");
double t = pose_msg->header.stamp.toSec();
last_vio_t = t;
//获取VIO输出的位置(三维向量),姿态(四元数)
Eigen::Vector3d vio_t(pose_msg->pose.pose.position.x, pose_msg->pose.pose.position.y, pose_msg->pose.pose.position.z);
Eigen::Quaterniond vio_q;
vio_q.w() = pose_msg->pose.pose.orientation.w;
vio_q.x() = pose_msg->pose.pose.orientation.x;
vio_q.y() = pose_msg->pose.pose.orientation.y;
vio_q.z() = pose_msg->pose.pose.orientation.z;
//位姿传入global Estimator中
globalEstimator.inputOdom(t, vio_t, vio_q);
m_buf.lock();
//寻找与VIO时间戳相对应的GPS信息
while(!gpsQueue.empty())
{
//获得最老的GPS数据和其时间
sensor_msgs::NavSatFixConstPtr GPS_msg = gpsQueue.front();
double gps_t = GPS_msg->header.stamp.toSec();
printf("vio t: %f, gps t: %f \n", t, gps_t);
// 10ms sync tolerance
if(gps_t >= t - 0.01 && gps_t <= t + 0.01)
{
//printf("receive GPS with timestamp %f\n", GPS_msg->header.stamp.toSec());
//GPS的经纬度,海拔高度
double latitude = GPS_msg->latitude;
double longitude = GPS_msg->longitude;
double altitude = GPS_msg->altitude;
//int numSats = GPS_msg->status.service;
//GPS数据的方差
double pos_accuracy = GPS_msg->position_covariance[0];
if(pos_accuracy <= 0)
pos_accuracy = 1;
//printf("receive covariance %lf \n", pos_accuracy);
//if(GPS_msg->status.status > 8)
//向globalEstimator中输入GPS数据
globalEstimator.inputGPS(t, latitude, longitude, altitude, pos_accuracy);
gpsQueue.pop();
//此处break,意味只存储了一个GPS数据后就break了。后来想明白了GPS不同于imu,是绝对位
break;
}
else if(gps_t < t - 0.01)
gpsQueue.pop();
else if(gps_t > t + 0.01)
break;
}
m_buf.unlock();
Eigen::Vector3d global_t;
Eigen:: Quaterniond global_q;
globalEstimator.getGlobalOdom(global_t, global_q);
nav_msgs::Odometry odometry;
odometry.header = pose_msg->header;
odometry.header.frame_id = "world";
odometry.child_frame_id = "world";
odometry.pose.pose.position.x = global_t.x();
odometry.pose.pose.position.y = global_t.y();
odometry.pose.pose.position.z = global_t.z();
odometry.pose.pose.orientation.x = global_q.x();
odometry.pose.pose.orientation.y = global_q.y();
odometry.pose.pose.orientation.z = global_q.z();
odometry.pose.pose.orientation.w = global_q.w();
pub_global_odometry.publish(odometry);
pub_global_path.publish(*global_path);
publish_car_model(t, global_t, global_q);
// write result to file
std::ofstream foutC("/home/tony-ws1/output/vio_global.csv", ios::app);
foutC.setf(ios::fixed, ios::floatfield);
foutC.precision(0);
foutC << pose_msg->header.stamp.toSec() * 1e9 << ",";
foutC.precision(5);
foutC << global_t.x() << ","
<< global_t.y() << ","
<< global_t.z() << ","
<< global_q.w() << ","
<< global_q.x() << ","
<< global_q.y() << ","
<< global_q.z() << endl;
foutC.close();
}
再看一下inputOdom函数,这个函数把vio的结果存储在localPoseMap中,然后使用外参 WGPS_T_WVIO把VIO的结果转换到GPS坐标系下存储在globalPoseMap中。注意,此时我们考虑刚开始gps没对齐时,此时外参WGPS_T_WVIO是单位矩阵,所以globalPoseMap里的位姿和VIO的结果一样。globalPoseMap是存储融合优化后的位姿的,这也符合逻辑:在没有gps数据时,融合结果完全和VIO一样。我的理解就是这个值也是放在GPS里面进行优化状态量的初始值,然后进行迭代优化的.
void GlobalOptimization::inputOdom(double t, Eigen::Vector3d OdomP, Eigen::Quaterniond OdomQ)
{
mPoseMap.lock();
// 把vio直接输出的位姿存入 localPoseMap 中
vector localPose{OdomP.x(), OdomP.y(), OdomP.z(),
OdomQ.w(), OdomQ.x(), OdomQ.y(), OdomQ.z()};
localPoseMap[t] = localPose;
// 把VIO转换到GPS坐标系下,准确的说是转换到以第一帧GPS为原点的坐标系下
// 转换之后的位姿插入到globalPoseMap 中
Eigen::Quaterniond globalQ;
globalQ = WGPS_T_WVIO.block<3, 3>(0, 0) * OdomQ;
Eigen::Vector3d globalP = WGPS_T_WVIO.block<3, 3>(0, 0) * OdomP + WGPS_T_WVIO.block<3, 1>(0, 3);
vector globalPose{globalP.x(), globalP.y(), globalP.z(),
globalQ.w(), globalQ.x(), globalQ.y(), globalQ.z()};
globalPoseMap[t] = globalPose;
lastP = globalP;
lastQ = globalQ;
//把vio转换坐标系后的结果赋值给global_path,给最新传入的一个初始值。
geometry_msgs::PoseStamped pose_stamped;
pose_stamped.header.stamp = ros::Time(t);
pose_stamped.header.frame_id = "world";
pose_stamped.pose.position.x = lastP.x();
pose_stamped.pose.position.y = lastP.y();
pose_stamped.pose.position.z = lastP.z();
pose_stamped.pose.orientation.x = lastQ.x();
pose_stamped.pose.orientation.y = lastQ.y();
pose_stamped.pose.orientation.z = lastQ.z();
pose_stamped.pose.orientation.w = lastQ.w();
global_path.header = pose_stamped.header;
global_path.poses.push_back(pose_stamped);
mPoseMap.unlock();
}
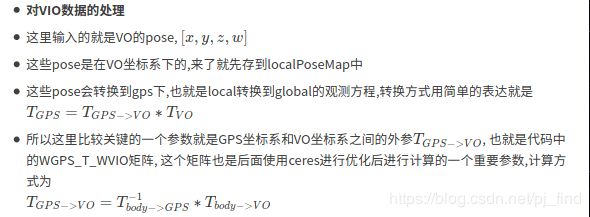
对gps信号转换坐标系
这里是输入的VO数据的10ms内的GPS数据进行坐标系转换,GPS2XYZ函数将GPS的经纬度坐标转换为ENU坐标,并且第一帧的GPS数据作为原点[0,0,0]转换之后的gps数据和协方差一起存入到GPSPositionMap中
void GlobalOptimization::inputGPS(double t, double latitude, double longitude, double altitude, double posAccuracy)
{
double xyz[3];
// 因为经纬度表示的是地球上的坐标,而地球是一个球形,
// 需要首先把经纬度转化到平面坐标系上
// 值得一提的是,GPS2XYZ()并非把经纬度转化到世界坐标系下(以0经度,0纬度为原点),
// 而是以第一帧GPS数据为坐标原点,这一点需要额外注意
GPS2XYZ(latitude, longitude, altitude, xyz);
// 存入经纬度计算出的平面坐标,存入GPSPositionMap中
vector tmp{xyz[0], xyz[1], xyz[2], posAccuracy};
//printf("new gps: t: %f x: %f y: %f z:%f \n", t, tmp[0], tmp[1], tmp[2]);
GPSPositionMap[t] = tmp;
newGPS = true;
}
接着就是进行优化了,先讲VIO的优化,加载优化的相关参数.
map>::iterator iter;
iter = globalPoseMap.begin();
for (int i = 0; i < length; i++, iter++)
{
t_array[i][0] = iter->second[0];
t_array[i][1] = iter->second[1];
t_array[i][2] = iter->second[2];
q_array[i][0] = iter->second[3];
q_array[i][1] = iter->second[4];
q_array[i][2] = iter->second[5];
q_array[i][3] = iter->second[6];
problem.AddParameterBlock(q_array[i], 4, local_parameterization);
problem.AddParameterBlock(t_array[i], 3);
}
将观测值两帧VIO的差传入到优化框架中
//vio factor
iterVIONext = iterVIO;
iterVIONext++;
// 添加VIO残差,观测量是两帧VIO数据之差,是相对的。而下面的GPS是绝对的
if(iterVIONext != localPoseMap.end())
{
Eigen::Matrix4d wTi = Eigen::Matrix4d::Identity();
Eigen::Matrix4d wTj = Eigen::Matrix4d::Identity();
wTi.block<3, 3>(0, 0) = Eigen::Quaterniond(iterVIO->second[3], iterVIO->second[4],
iterVIO->second[5], iterVIO->second[6]).toRotationMatrix();
wTi.block<3, 1>(0, 3) = Eigen::Vector3d(iterVIO->second[0], iterVIO->second[1], iterVIO->second[2]);
wTj.block<3, 3>(0, 0) = Eigen::Quaterniond(iterVIONext->second[3], iterVIONext->second[4],
iterVIONext->second[5], iterVIONext->second[6]).toRotationMatrix();
wTj.block<3, 1>(0, 3) = Eigen::Vector3d(iterVIONext->second[0], iterVIONext->second[1], iterVIONext->second[2]);
Eigen::Matrix4d iTj = wTi.inverse() * wTj;
Eigen::Quaterniond iQj;
iQj = iTj.block<3, 3>(0, 0);
Eigen::Vector3d iPj = iTj.block<3, 1>(0, 3);
ceres::CostFunction* vio_function = RelativeRTError::Create(iPj.x(), iPj.y(), iPj.z(),
iQj.w(), iQj.x(), iQj.y(), iQj.z(),
0.1, 0.01);
problem.AddResidualBlock(vio_function, NULL, q_array[i], t_array[i], q_array[i+1], t_array[i+1]);
,而VIO的数据和状态量的残差定义为:(j时刻的状态量-i时刻的状态量)得到的增量-vio增量。其意味着融合后的位置必须和GPS位置尽可能重合,而两帧间的增量要和VIO尽可能相等。这对理解坐标转换至关重要,这样的处理意味着vio的数据并不对融合后的绝对位置做约束,只要求融合后的位置增量和vio的增量误差尽可能小。所以融合后的位置会在GPS坐标系下。
bool operator()(const T* const w_q_i, const T* ti, const T* w_q_j, const T* tj, T* residuals) const
{
T t_w_ij[3];//世界坐标系下ij帧的位置增量
t_w_ij[0] = tj[0] - ti[0];
t_w_ij[1] = tj[1] - ti[1];
t_w_ij[2] = tj[2] - ti[2];
T i_q_w[4];//i帧的四元数逆
QuaternionInverse(w_q_i, i_q_w);
T t_i_ij[3];//i帧坐标系下,ij帧的位置增量
ceres::QuaternionRotatePoint(i_q_w, t_w_ij, t_i_ij);
residuals[0] = (t_i_ij[0] - T(t_x)) / T(t_var);
residuals[1] = (t_i_ij[1] - T(t_y)) / T(t_var);
residuals[2] = (t_i_ij[2] - T(t_z)) / T(t_var);
T relative_q[4];//传入观测的四元数增量
relative_q[0] = T(q_w);
relative_q[1] = T(q_x);
relative_q[2] = T(q_y);
relative_q[3] = T(q_z);
T q_i_j[4];//状态量计算的四元数增量
ceres::QuaternionProduct(i_q_w, w_q_j, q_i_j);
T relative_q_inv[4];
QuaternionInverse(relative_q, relative_q_inv);
T error_q[4];//状态量计算的增量乘上测量量的逆,定义了残差
ceres::QuaternionProduct(relative_q_inv, q_i_j, error_q);
residuals[3] = T(2) * error_q[1] / T(q_var);
residuals[4] = T(2) * error_q[2] / T(q_var);
residuals[5] = T(2) * error_q[3] / T(q_var);
return true;
}
对GPS因子的优化.
加载GPS观测值
//gps factor
// GPS残差,这个观测量直接就是GPS的测量数据,
// 残差计算的是GPS和优化变量的差,这个是绝对的差。
double t = iterVIO->first;
iterGPS = GPSPositionMap.find(t);
if (iterGPS != GPSPositionMap.end())
{
ceres::CostFunction* gps_function = TError::Create(iterGPS->second[0], iterGPS->second[1],
iterGPS->second[2], iterGPS->second[3]);
//printf("inverse weight %f \n", iterGPS->second[3]);
problem.AddResidualBlock(gps_function, loss_function, t_array[i]);
这个里的状态量就是前面从VIO坐标系转到GPS坐标系作为初值进行优化.
TError(double t_x, double t_y, double t_z, double var)
:t_x(t_x), t_y(t_y), t_z(t_z), var(var){}
//首先是GPS的数据和状态量定义的残差:状态量位置-gps算出来的位置
template
bool operator()(const T* tj, T* residuals) const
{
residuals[0] = (tj[0] - T(t_x)) / T(var);
residuals[1] = (tj[1] - T(t_y)) / T(var);
residuals[2] = (tj[2] - T(t_z)) / T(var);
return true;
}
在优化求解完成以后,会遍历globalPoseMap,对其更新。即globalPoseMap里面存储着优化后的位姿。同时,之后会用在VIO坐标系下的位置(localPoseMap里)和优化后在GPS坐标系下的位置(globalPose)对外参WGPS_T_WVIO进行更新。还是考虑第一次同步的gps数据传入,优化完成后。外参WGPS_T_WVIO之前是单位矩阵,而第一次更新,会算出真正和实际相符的外参。
iter = globalPoseMap.begin();
for (int i = 0; i < length; i++, iter++)
{
vector globalPose{t_array[i][0], t_array[i][1], t_array[i][2],
q_array[i][0], q_array[i][1], q_array[i][2], q_array[i][3]};
iter->second = globalPose;
if(i == length - 1)
{
Eigen::Matrix4d WVIO_T_body = Eigen::Matrix4d::Identity();
Eigen::Matrix4d WGPS_T_body = Eigen::Matrix4d::Identity();
double t = iter->first;
WVIO_T_body.block<3, 3>(0, 0) = Eigen::Quaterniond(localPoseMap[t][3], localPoseMap[t][4],
localPoseMap[t][5], localPoseMap[t][6]).toRotationMatrix();
WVIO_T_body.block<3, 1>(0, 3) = Eigen::Vector3d(localPoseMap[t][0], localPoseMap[t][1], localPoseMap[t][2]);
WGPS_T_body.block<3, 3>(0, 0) = Eigen::Quaterniond(globalPose[3], globalPose[4],
globalPose[5], globalPose[6]).toRotationMatrix();
WGPS_T_body.block<3, 1>(0, 3) = Eigen::Vector3d(globalPose[0], globalPose[1], globalPose[2]);
WGPS_T_WVIO = WGPS_T_body * WVIO_T_body.inverse();
}
}
updateGlobalPath();