RT-Thread Studio硬件定时器hwtimer在stm32f411上的使用笔记
创建基于F411的芯片空工程。
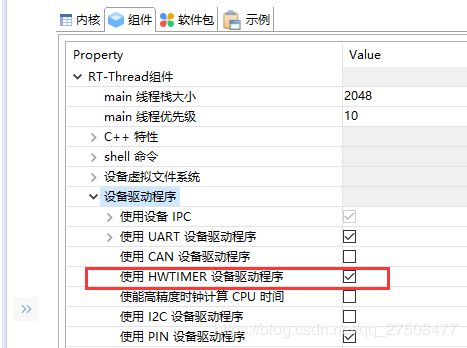
启用hwtimer:
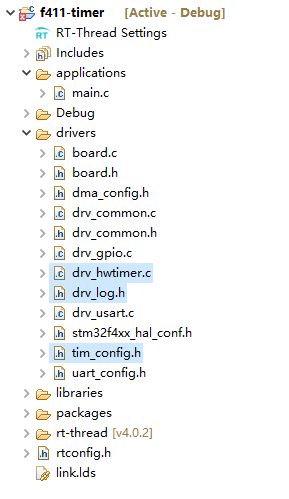
拷贝以下三个文件到drivers目录,路径分别为
C:\RT-ThreadStudio\download\rt-thread-sdk\rt-thread-src\v4.0.2\bsp\stm32\libraries\HAL_Drivers\config\f4
和 C:\RT-ThreadStudio\download\rt-thread-sdk\rt-thread-src\v4.0.2\bsp\stm32\libraries\HAL_Drivers 。
注释掉drv_hwtimer.c中的#include "drv_config.h"。
取消注释stm32f4xx_hal_conf.h中的#define HAL_TIM_MODULE_ENABLED。
向tim_config.h添加#include 。
向drv_hwtimer.c添加#include 。
向drv_hwtimer.c添加#include 。
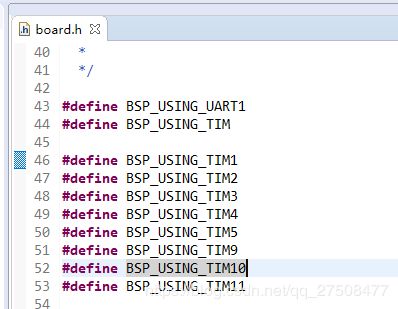
在board.h中定义需要使用的定时器:
根据要使用的定时器,修改tim_config.h:
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2018-12-11 zylx first version
*/
#ifndef __TIM_CONFIG_H__
#define __TIM_CONFIG_H__
#include 在drv_hwtimer.h中增加CubeMX生成的底层代码:
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* htim_base)
{
if (htim_base->Instance == TIM1)
{
__HAL_RCC_TIM1_CLK_ENABLE();
}
else if (htim_base->Instance == TIM2)
{
__HAL_RCC_TIM2_CLK_ENABLE();
}
else if (htim_base->Instance == TIM3)
{
__HAL_RCC_TIM3_CLK_ENABLE();
}
else if (htim_base->Instance == TIM4)
{
__HAL_RCC_TIM4_CLK_ENABLE();
}
else if (htim_base->Instance == TIM5)
{
__HAL_RCC_TIM5_CLK_ENABLE();
}
else if (htim_base->Instance == TIM9)
{
__HAL_RCC_TIM9_CLK_ENABLE();
}
else if (htim_base->Instance == TIM10)
{
__HAL_RCC_TIM10_CLK_ENABLE();
}
else if (htim_base->Instance == TIM11)
{
__HAL_RCC_TIM11_CLK_ENABLE();
}
}
修改drv_hwtimer.h中HAL_TIM_PeriodElapsedCallback,为使用的定时器添加回调函数:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
#ifdef BSP_USING_TIM1
if (htim->Instance == TIM1)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM1_INDEX].time_device);
}
#endif
#ifdef BSP_USING_TIM2
if (htim->Instance == TIM2)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM2_INDEX].time_device);
}
#endif
#ifdef BSP_USING_TIM3
if (htim->Instance == TIM3)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM3_INDEX].time_device);
}
#endif
#ifdef BSP_USING_TIM4
if (htim->Instance == TIM4)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM4_INDEX].time_device);
}
#endif
#ifdef BSP_USING_TIM5
if (htim->Instance == TIM5)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM5_INDEX].time_device);
}
#endif
#ifdef BSP_USING_TIM9
if (htim->Instance == TIM9)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM9_INDEX].time_device);
}
#endif
#ifdef BSP_USING_TIM10
if (htim->Instance == TIM10)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM10_INDEX].time_device);
}
#endif
#ifdef BSP_USING_TIM11
if (htim->Instance == TIM11)
{
rt_device_hwtimer_isr(&stm32_hwtimer_obj[TIM11_INDEX].time_device);
}
#endif
}
添加中断函数入口:
#ifdef BSP_USING_TIM2
void TIM2_IRQHandler(void)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM2_INDEX].tim_handle);
/* leave interrupt */
rt_interrupt_leave();
}
#endif
#ifdef BSP_USING_TIM3
void TIM3_IRQHandler(void)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM3_INDEX].tim_handle);
/* leave interrupt */
rt_interrupt_leave();
}
#endif
#ifdef BSP_USING_TIM4
void TIM4_IRQHandler(void)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM4_INDEX].tim_handle);
/* leave interrupt */
rt_interrupt_leave();
}
#endif
#ifdef BSP_USING_TIM5
void TIM5_IRQHandler(void)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM5_INDEX].tim_handle);
/* leave interrupt */
rt_interrupt_leave();
}
#endif
#ifdef BSP_USING_TIM11
void TIM1_BRK_TIM9_IRQHandler(void)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM9_INDEX].tim_handle);
/* leave interrupt */
rt_interrupt_leave();
}
#endif
#if defined( BSP_USING_TIM1) ||defined(BSP_USING_TIM10)
void TIM1_UP_TIM10_IRQHandler(void)
{
/* enter interrupt */
rt_interrupt_enter();
#ifdef BSP_USING_TIM1
if (__HAL_TIM_GET_FLAG(&stm32_hwtimer_obj[TIM1_INDEX].tim_handle,TIM_IT_UPDATE) != RESET)
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM1_INDEX].tim_handle);
#endif
#ifdef BSP_USING_TIM10
if (__HAL_TIM_GET_FLAG(&stm32_hwtimer_obj[TIM10_INDEX].tim_handle,TIM_IT_UPDATE) != RESET)
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM10_INDEX].tim_handle);
#endif
/* leave interrupt */
rt_interrupt_leave();
}
#endif
#ifdef BSP_USING_TIM11
void TIM1_TRG_COM_TIM11_IRQHandler(void)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_TIM_IRQHandler(&stm32_hwtimer_obj[TIM11_INDEX].tim_handle);
/* leave interrupt */
rt_interrupt_leave();
}
#endif
新建一个usertimer.c,添加示例代码,通过msh调用即可看到效果:
/*
* Copyright (c) 2006-2020, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2020-03-23 ShineRoyal the first version
*/
#include 注意,定时器1的定时会快一倍(这里是1s的间隔,但定时器1会500ms进一次中断),尚不清楚是rt-thread的库造成的还是硬件本身时钟相关的原因,后续在研究。
完整工程下载
第二天找到了具体原因,查看RT-Thread Studio部分定时器时钟不正确的解决方案