注: 程序所用的OpenCV版本是 2.4.10 ,3.0以上的版本可能会有不同
先贴一下完整的工程代码:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include
#include
using namespace cv;
using namespace std;
void main()
{
ifstream fin("calibdata.txt"); /* 标定所用图像文件的路径 */
ofstream fout("caliberation_result.txt"); /* 保存标定结果的文件 */
//读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
cout<<"开始提取角点………………";
int image_count=0; /* 图像数量 */
Size image_size; /* 图像的尺寸 */
Size board_size = Size(4,6); /* 标定板上每行、列的角点数 */
vector image_points_buf; /* 缓存每幅图像上检测到的角点 */
vector> image_points_seq; /* 保存检测到的所有角点 */
string filename;
int count= -1 ;//用于存储角点个数。
while (getline(fin,filename))
{
image_count++;
// 用于观察检验输出
cout<<"image_count = "<count = "< 第 "< : "<"<"<> object_points; /* 保存标定板上角点的三维坐标 */
/*内外参数*/
Mat cameraMatrix=Mat(3,3,CV_32FC1,Scalar::all(0)); /* 摄像机内参数矩阵 */
vector point_counts; // 每幅图像中角点的数量
Mat distCoeffs=Mat(1,5,CV_32FC1,Scalar::all(0)); /* 摄像机的5个畸变系数:k1,k2,p1,p2,k3 */
vector tvecsMat; /* 每幅图像的旋转向量 */
vector rvecsMat; /* 每幅图像的平移向量 */
/* 初始化标定板上角点的三维坐标 */
int i,j,t;
for (t=0;t tempPointSet;
for (i=0;i image_points2; /* 保存重新计算得到的投影点 */
cout<<"\t每幅图像的标定误差:\n";
fout<<"每幅图像的标定误差:\n";
for (i=0;i tempPointSet=object_points[i];
/* 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 */
projectPoints(tempPointSet,rvecsMat[i],tvecsMat[i],cameraMatrix,distCoeffs,image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector tempImagePoint = image_points_seq[i];
Mat tempImagePointMat = Mat(1,tempImagePoint.size(),CV_32FC2);
Mat image_points2Mat = Mat(1,image_points2.size(), CV_32FC2);
for (int j = 0 ; j < tempImagePoint.size(); j++)
{
image_points2Mat.at(0,j) = Vec2f(image_points2[j].x, image_points2[j].y);
tempImagePointMat.at(0,j) = Vec2f(tempImagePoint[j].x, tempImagePoint[j].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err/= point_counts[i];
std::cout<<"第"< 运行前需要先准备标定图片和记录标定图片列表的文本文件,并放入程序所在目录下,如下图所示:
文本文件的内容如下:
运行效果图1:

图2:

图3:
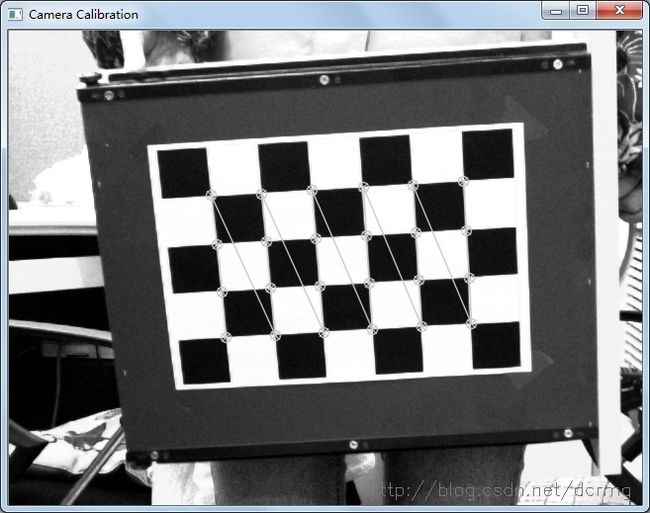
图4:
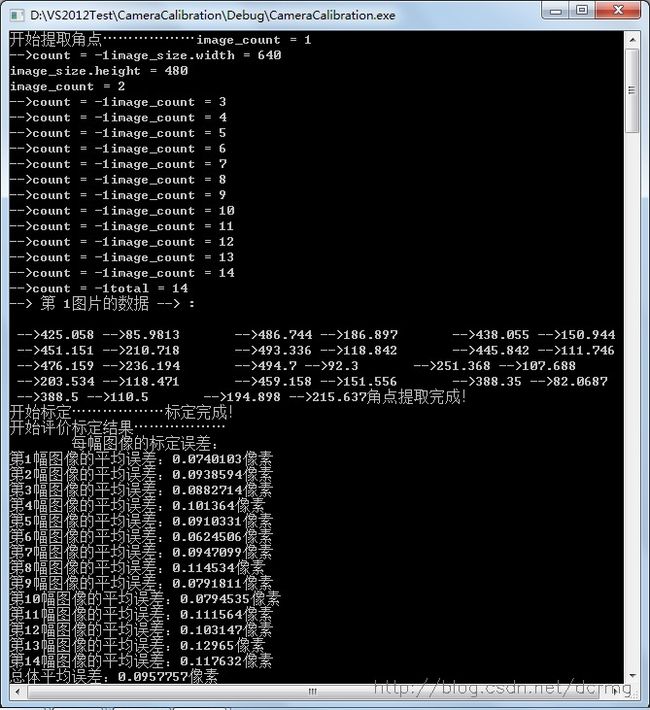
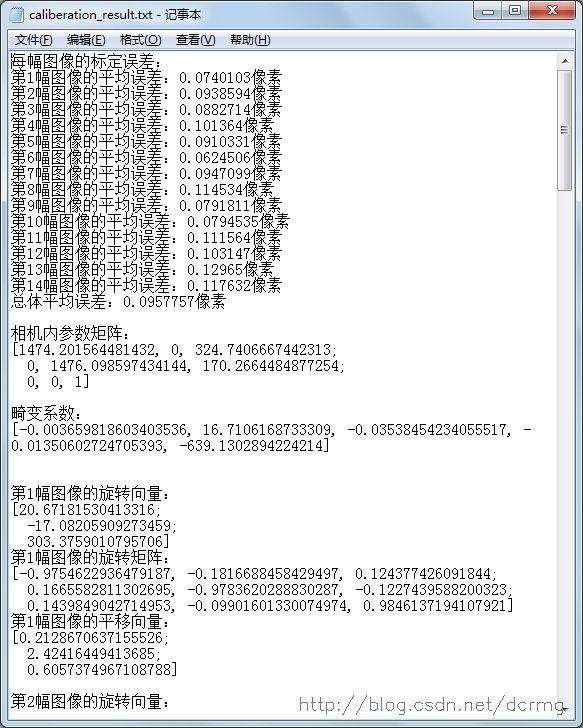
最后在程序所在目录下生成“caliberation_result.txt”文件,记录了标定的误差、相机内外参数信息:
感谢无名前辈提供的测试图例!