智能车仿真 —— 2020室外光电组仿真指导(一)
前言
今天推出了官方的仿真文件,我也参与了部分仿真模型的设计,提供一个简单的参考思路。
完整文章地址:古月居博客网站
模型下载地址
https://pan.baidu.com/s/1TFBTbCeyQMuKnxemCbyNSw 提取码: crm5
安装依赖工具
sudo apt-get install ros-kinetic-controller-manager
sudo apt-get install ros-kinetic-gazebo-ros-control
sudo apt-get install ros-kinetic-effort-controllers
sudo apt-get install ros-kinetic-joint-state-controller
sudo apt-get install ros-kinetic-driver-base
sudo apt-get install ros-kinetic-rtabmap-ros
sudo apt-get install ros-kinetic-ackermann-msgs
sudo apt-get install ros-kinetic-teb-local-planner
如果gazebo打开仿真出现cmd134字眼是gazebo版本太低的原因从7.0.0升级到7.16.0即可!!!
模型使用说明
首先创建工作区间:
mkdir -p smartcar_ws/src
初始化工作区间
cd ~/smartcar_ws/src
catkin_init_workspace
然后导入仿真文件,将百度云下载的压缩文件解压,将其中的racecar_description.7z文件复制到smartcar_ws/src下并提取(如下图):
将压缩文件中的smartcar_plane.7z文件提取到.gazebo下的models下,具体操作如下:
- 在home目录下ctrl + h显示隐藏文件
- 找到.gazebo文件
- 进入文件中的models文件夹(如果没有就自己创建一个)
- 将smartcar_plane.7z解压到models下
在racecar_description文件夹下创建worlds文件夹,然后把百度网盘的world文件放到下面:

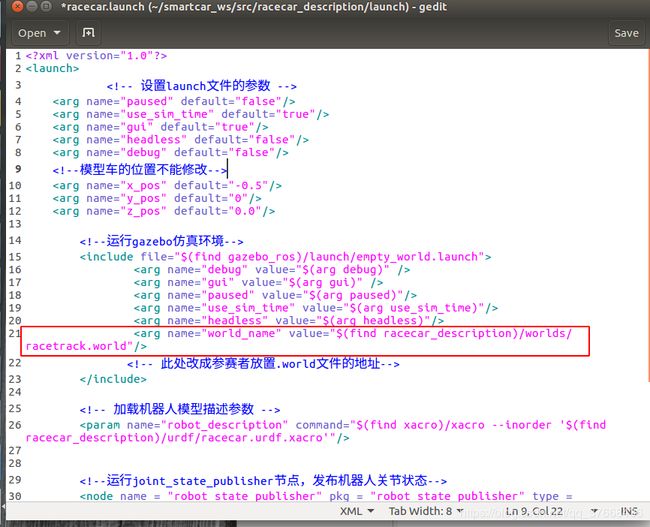
修改一下launch文件夹中的racecar.launch文件:
编译工程:
cd ~/smartcar_ws
catkin_make
使能环境变量:
echo "source ~/smartcar_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
启动仿真环境:
roslaunch racecar_description racecar.launch
启动rviz和gazebo:
roslaunch racecar_description racecar_rviz.launch

仿真任务提示
这里推荐下古月居网站哦~完整文章传送门
听说有人配置不来运动控制器,加了点提示~戳上面持续更新
享受比赛~
附件:关于添加锥桶
gazebo是可以直接打开world文件的,命令格式:
gazebo ***.world
官方提供的场地目前没加锥桶,我们可以自己添加,首先下载gazebo的模型:
链接:http://pan.baidu.com/s/1pKaeg0F 密码:cmxc (来自rosclub.cn)
或是下载https://bitbucket.org/osrf/gazebo_models/downloads/ (ExBot ROS专区,网友提醒)
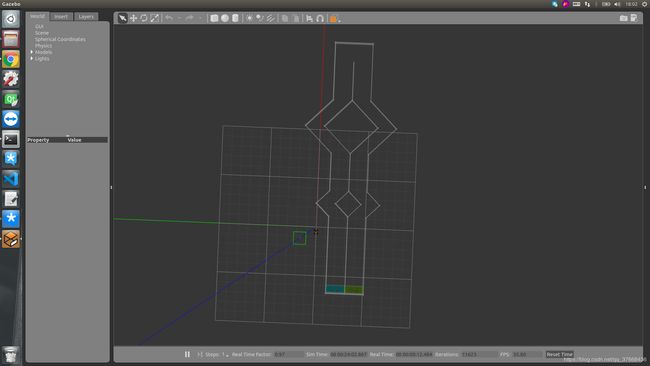
下载后找到官方的场地world文件,进入那个文件夹:
gazebo racetrack.world
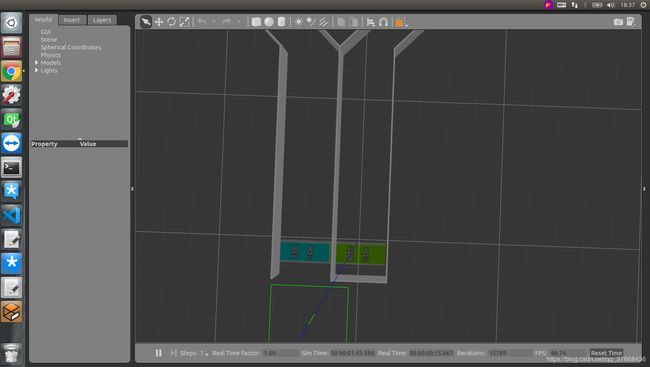
点击左上角insert插入锥桶:

插入后保存新的world文件,点击左上角:
![]()
选择save world as替换官方的world即可:
