机器人之梦
《目录》
- 江涵秋影雁初飞,与客携壶上翠微
- 博弈局面
- 走迷宫
- 未来战事
- 年年岁岁花相似,岁岁年年人不同
- 脑机
- 接口
- 外骨骼
- 脑控打字
- 5G
- VR
- ROS 机器人
江涵秋影雁初飞,与客携壶上翠微
新征程 --- Robots。

电影里的机器人,硬件上是能做出来的,但没有那么智能 ~

目前,最智能的机器人是 科研机器人 ,

小小的一个 NAO 机器人,能卖到 10 万RMB,有些学校买是为了做研究,有些学校买是只是为了秀,提高知名度,招学生,骗子一个。
博弈局面
现在市场上的机器人主要是 工业机器人(机械臂),目的是打造一条自动化的生产线,比起流水线的效率会高很多,长期来说,成本较人工减低了很多,但一套这样的系统太贵了,目前只在沿海地区覆盖。
这就是一个趋势啊,对于各大厂商来说,也是一个博弈局面;先参加博弈的好处往往越多,换上工业机器人的厂商可以大幅度减低产品价格,打价格战 ......
 工业机器人界的大牌,简称 四大家族
工业机器人界的大牌,简称 四大家族
当所有人都意识不到博弈的时候,可能你吹吹风都能赢。
少数人意识到博弈的时候,谁意识到博弈谁赢。
大家都意识到博弈了,那就只能比执行力 —— 或者看谁能意识到新的博弈。
这个前提得是,您有足够的前瞻性预测了未来的博弈局面.......
 四大家族简介
四大家族简介
工业机器人最核心的地方,就是控制柜,里面的算法是最值钱的;而在这些算法里,最最重要的就是机械臂的加工轨迹(tool-path)的设计,学过工业机器人的同学应该很熟悉啊。
机械臂常用于制造业、运输业和测试应用中,比如让机械臂焊接一块玻璃,玻璃上有上千个点需要焊接。
如果让我们来设计算法的话,基本要求就是编制出一套触点的访问次序,这样机械臂就可以访问(并焊接)第 1 个触点,接着第 2 个触点,第 3 个 ...... 这样循环知道遍历了所有触点,最后机械臂再回到第 1 个触点,为下一块玻璃做准备,加工轨迹就是一个封闭的环呀。
减低成本,算法优化:机器人是昂贵的设备,因此我们希望焊接玻璃所花费的时间最少。
哇,您一看就发现这不就是计算机界著名的旅行商问题吗 !!! ( 旅行商问题的算法具体的内容记录在博客《算法!司南》)
走迷宫
也有很火的仓储机器人 AGV ,他们的算法就是图的搜索算法啊,如 广度优先搜索、深度优先搜索、A* 搜索 ...... ,这些算法的起源应该是想解决迷宫问题吧,解迷宫的算法就是扫地机器人、自动导航小车AGV、比AGV更智能的服务机器人、电网结构、无人机农业洒水、洒农药、汽车导航系统、物流路线、邮件发送、服务器响应浏览器发送网页的算法,学好一个一通百通,如果想解迷宫请见博客《爬虫导论》。

原理的确是解迷宫的算法,除此之外,这些物流机器人也通过人工智能优化了仓储物流的效率;物流机器人大幅度提高了空间的利用率(仓储空间完全自动化,这就不需要给人留下走路的地方)。
我们人类在管理仓库时,会分门别类地摆好货物,这样找的时候,会比较好找,而亚马逊的物流机器人却不是这么做的,TA们摆放货物的方式,在人类眼中看来可能是杂乱无章的,比如说电线和尿不湿摆在一起。
但物流机器人却能根据物品记录在系统中的位置,准确找到货物。TA们根本不在乎,也不需要花时间分门别类地摆放货物。
其次,亚马逊的物流运转,彻底从以人为主体,变成了以机器为主体,大大提升了效率,整个仓储区实现了无人化与自动化。
人类工人在仓储区外围有固定的工作站,当需要补货时,亚马逊机器人会驮着货架来接,补充好后,自动移走。当需要配货时,也不需要人类跑来跑去,装着对应货物的机器人,会排队来到配货员面前,配货员只要按照订单上的信息,把货物装进箱子里就好了。
这样,就将原有的货物中心化,变成配货工中心化,既降低了货物仓储和分拣的成本,也大大地提升了效率。
未来战事
古代战争基本上就是靠肉搏,拼刺刀,如果看到盾牌、连弩、攻城锤、大炮这种,就已经算是很高级的武器了。
武器的打击范围是很小的,比如早期的火枪,打击范围也就只有75米左右,准头也实在不怎么样。因为武器都需要人操作,射程也不怎么远,打一场仗需要非常多的人,每个人负责的面积可能只有几平方米。
这样子的战斗就需要非常长的准备时间,从宣战发兵到兵临城下,对方已经有足够的时间做好准备了。
今天,大到核武器、巡航导弹,小到无人机,都能将武器打击范围扩展到地球上的每一个角落,甚至不需要一兵一卒,只要依靠GPS和实时网络,就可以在地球另一端的控制室内操纵一切战局,而对于被打击的一方来说,一旦被瞄准,他们可以做出反应的时间是非常短的,也不太会有机会知道无人机是从什么地方飞来的,会持续袭击多久。
为了应对未来随时可能爆发的战争,大国之间都积极的研发军用机器人。
军用机器人相比人类士兵,从募集、训练,到投入战场,后勤保障,甚至抚恤费用,几十万、几百万美元的自动化设备成本其实一点也不高。

英国联合部队的前总指挥,理查德·巴伦爵士就说:“机器人可不会管你要抚恤金!”;自动化武器报废了,战损是可以精确用费用来衡量的,士兵可不行,各种心理因素、社会反响、政治影响多了去了。
现代新型的战争形式,已经不再是那种飞机、坦克、机枪、战壕的方式,而是变得更加分散,更加的小型化,更多地偏向反恐战争;如美国,就以打击恐怖组织为名头,对中东发动了一次又一次的间谍行动和无人机轰炸。
因为美国的无人机和间谍活动是一种不平等的战争方式(被攻击的人几乎没有反应时间、也不知道无人机从哪里来、目的是什么),因此唯一的方法就是隐藏身份。
极端恐怖组织 ISIS 就于 2015 年发布了这一份指南,建议执行任务的信徒们不要戴头巾,不要留胡子,不要经常去清真寺,要把身份一直隐藏到秘密任务前的最后一刻。
这个还真有点细思极恐了,说得稍微危言耸听一点,这些人随时随地都有可能出现在我们身边;这也就意味着对他们的打击也可能随时随地出现在我们身边。
这就是在传统战场已经消失的情况下,我们需要学习应付和面对的新的战争形态,类似无人机打击这样的新战争模式,极有可能在毫无预警的情况下,突然出现在你我的身边。
年年岁岁花相似,岁岁年年人不同
目前,全世界的主流机器人都是工业机器人,也就是在流水线上作业的机器人,比如说安装汽车配件、组装设备的机器人。
但在未来,机器人的另一大任务,就是照顾老龄人口生活,TA们可以帮助老年人洗衣做饭,照料老年人的日常起居和医疗健康,因此,未来社会对于服务型机器人的需求将会越来越强。
服务型机器人和工业型机器人最大的差别在于,工业型机器人的作用是取代人类,而服务型机器人则是辅助人类、照顾人类。
目前主流的服务型机器人有三种,分别是医疗型机器人、陪伴型机器人和护理辅助型机器人。
这三种机器人的作用各不相同:
- 医疗型机器人能够提供医疗辅助,
- 陪伴型机器能够和人类建立亲密关系,帮助人们缓解孤独 (隔座送钩春酒暖,分曹射覆蜡灯红);
- 护理辅助型机器人能够辅助人类提取重物。
脑机
脑机接口,这里的 “脑”,指的是大脑以及我们的神经系统。
21 世纪之后,脑机接口飞速发展,这主要是因为神经科学家们发现了大脑的可塑性。
什么是可塑性呢 ,举个例子 ?
老司机开车的时候,对外界的感觉从自己的身体扩展到了汽车的车体,TA 不用看,就知道车离马路牙子有多远。
您可能觉得,这不就是长期练习以后,形成了肌肉记忆嘛!
但在神经科学家们看来,没有那么简单,“车感” 这种现象和大脑的可塑性有关,神经科学家们认为这是大脑重新定义了身体的边界。
这有一个神奇的事情,我们能操控身体就像老司机驾驶汽车一般熟练,可那是因为我们的身体有感觉细胞呀,感觉细胞能随时把信号传递给大脑,可汽车是没有的。
脑机接口的起点,也是一件与“车感”类似的事件。
有些人不幸被截肢,失去了手,但 TA 总觉得那只手还在;而且这个不存在的手还常常会有剧烈的疼痛感,或者僵硬的瘫痪感。
这就很奇怪了,要知道手已经失去了,那手的感知细胞也就不存在了,没有感知细胞给大脑传递信号,怎么还会痛呢 ???
经过了许久许久,神经科学家们终于解决了这个问题。
他们用纸箱和镜子组成了一个镜箱,如图。

TA的原理很简单,就是病人把一只健全的手伸进箱子里,通过镜子的反射,他以为看到另一只失去的手。
病人活动那只健全的手,会以为在活动另一只失去的手,一段时间之后,疼痛感居然就减轻了。
神经科学家认为是因为失去的手,仍然被大脑定义在身体的边界之内。
具体来说,这是由于大脑已经有了对身体全局洞察,TA 自己会对身体有个预判,认为还能指挥这只手;但手却没法给大脑反馈,所以,当大脑频繁指挥,比如让手活动,手却一动不动的时候,大脑就觉得,这只手瘫痪了。
于是就有了僵硬或者疼痛的“幻肢”感觉,镜箱所做的,其实就是用错觉告诉大脑:“看!你的手就在这里,你能指挥TA”。
那么之前感到的痛感,通过活动这个 “幻肢”,逐渐就消退了。
其实,从上面俩个实例可以看出大脑是可以修改身体的边界,这时神经科学家们就想搞事情了:机器能不能进入这个边界呢 ?
后来,他们发现大脑修改边界造成的局面就是大脑皮层的重组,大脑皮层如同计算机的 CPU,我们的思考、视觉、运动、性格等等都与大脑皮层有关;经过长期的镜箱训练后,大脑的皮层就重组了,大脑的边界也就改变了,接着手也就不痛了......
目前脑机接口的原理便是这般。
接口
脑机接口,这里的 “脑”,指的是大脑以及我们的神经系统;而 “机” 是外部设备,例如机械臂、外骨骼、无人机、电子皮肤等等。
在脑机部分,我们清楚的理解了脑机接口技术的原理,但摆在脑机接口面临的一个很现实的问题是,我们怎么把大脑和机器连接起来呢,难道要开颅吗 ???
脑机接口最大的难题,就在于“接口”两个字。
接口的功能,其实就像语言一样,要把大脑里的讯息理解以后,翻译出来。
虽然说,直到现在我们都不太清楚神经元之间是怎么排布、怎么连接的,但早在1924年,第一个采集脑信号的设备就诞生了
一位叫汉斯-贝格尔的德国医生做出来的,他当时发现,从我们人的头皮上能采集到一些电波一样的信号,而这些电信号似乎和一个人的精神状态有关。
比如说,人在比较放松的状态下,会释放一种较为固定的电波,我们称之为 α 波。
当然,现在我们知道,这是因为大脑的一切活动都伴随着神经元的放电现象,如当人学习一项新技能的时候,大脑里特定区域的神经元就会开始释放电信号,经过多次练习的巩固,就会形成一条稳定的神经通路,人也就掌握了这个技能。
所以说,电信号就是大脑跟身体沟通的一种神秘语言,这其实就是我们现在经常说的“脑电波”;做脑机接口的科学家们,最想要实现的就是看谁能采集更多、更精准的电信号数据,而后尝试理解这些信号所对应的大脑指令。
那怎么采集呢 ??
在美国,侵入派和非侵派公司刚好在东西海岸主动划分了地盘。
侵入派盛行在硅谷为首的西部,代表公司是希望提升人类智力的 Kernel 和马斯克的 NeuraLink 。
而 “非侵派” 呢,集中在东部,有从哈佛校园走出来的 BrainCo,还有加拿大的 Muse 等等。
- 侵入派就像《黑客帝国》一样,把电极放到大脑里去,这叫 “侵入式” 的脑机接口;
 侵入派:要开颅放在大脑里
侵入派:要开颅放在大脑里
- 非侵派是像100年前汉斯-贝格尔那样,隔着头皮,用挂在脑外的设备来采集信号,这叫“非侵式”脑机接口。
 非侵派
非侵派
您很可能在生活中,已经见过非侵式脑机了。
我们最常使用的非侵入接口,其实就是医院里面你会见到的脑电图;做脑电图的时候,人会戴上一个布满电极的帽子,电极采集的脑信号会传导给一台机器,分析脑电波。
比如波形显示出 β 波,说明人很紧张;一般人进入睡眠后,脑波频率会下降,变成 θ 波。
这种方式的劣势,就是采集到的信号分辨率比较低。因为
颅骨会大量拦截从大脑发放的脑电信号,这就像是说,我们想去听一场演唱会,不只没有门票进去,还是站在非常远的广场上听的;不过,大家可也别因此就小看了非侵式脑机接口的潜力。
毕竟,天文学家仅仅是通过望远镜观测,也发现了宇宙星系之中的“红移”现象,提出了宇宙膨胀的学说;而且非侵入接口明显会被更快的商用......
图灵证明了计算机是可以做出来后,其余的具体实现都得交给物理学家;同样,神经科学家们有了想法之后,其余的具体实现都得交给材料科学家了。
 纳米材料制做的 电子纹身
纳米材料制做的 电子纹身
因此脑机接口,就是把我们大脑的想法传递给外部设备,甚至直接传递给其他人的大脑。
外骨骼
如果你对“外骨骼”这个词有点陌生,你可以想象,外骨骼就等于现实中的钢铁侠里的战甲,样子会简陋一点,功能也没有那么强大。

2014年巴西世界杯开幕式,骚年 利亚诺·平托 就是穿了这样庞大、笨重的机械战甲,踢出了当年世界杯的第一球。
虽然,当时踢球动作只持续了 2 秒,甚至很多人没注意到。
但利亚诺本人在开球后兴奋地大喊,“我感觉到球了”。
他为什么这么激动 ?
6年前因为车祸,造成利亚诺脊髓受伤,之后他都在轮椅上度过。
在全身瘫痪前,他是一名运动员,而之后呢,他从胸到脚趾,都没了任何知觉。
开幕式上,利亚诺之所以能踢球,是用脑机接口操控了那副笨重的机械外骨骼才完成的。
所以这一脚球对利亚诺的意义,几乎是无价的。
不过,对这件事的讨论却逐渐走向两极。
有一些人认为是科学盛事,第一次在实验室外,实现脑机接口控制下肢运动。这一脚对脑机接口来说和阿波罗登月差不多,你看,这就给了一个非常高的肯定。
但另一些人呢,他们认为这次开球并不成功,动作只有 2 秒,很难判断是不是利亚诺靠大脑操控完成的,技术事实难以验证。
事实上,这套笨着的外骨骼,是二十几个团队花了近 20 年的时间才研制出来的,其中的艰辛不言而喻。
实现外骨骼技术有很多技术难点,简单的举俩个。
第一个就是“感觉”反馈。
“感觉”反馈,就是我们对环境的温度、硬度、压力等等各种情况的感受,你可以通过你的感觉细胞,给大脑送去对外界的反馈
比方说,手感觉太烫了,就会缩回来。听起来这事没什么复杂,但千万别忘了,瘫痪病人是没有任何感觉反馈能力的。
那你会想啊,没有“感觉”反馈能力,究竟会怎么样呢 ?
举个例子,你用手去抓一根铁棍,会用很大的力气,如果拿起一颗鸡蛋呢 ?
你会轻拿轻放。但是如果换成控制机械臂就不一样了,机械臂表面没有感觉细胞,TA不能分辨这个东西到底是铁棍还是鸡蛋,如果用拿铁棍的力气去拿鸡蛋,鸡蛋很可能会碎掉。
所以没有“感觉”反馈,大脑发送错误指令的机会就非常大。
神经科学家是怎么解决这个问题呢 ??
他们打造的这套机械战甲,做了一种 “人造皮肤” 来模拟“感觉”反馈。
这层所谓“皮肤”其实就是一堆传感器。尼科莱利斯教授把 TA 附在“机械战甲”外部,用来探测接触地面的信号,比如触觉、温度、压力等等。
通过人造皮肤的反馈,利亚诺可以判断地面信息,现在是踩在沥青地面上了,还是草地上了?
根据不同的反馈,他就可以调整机械战甲行动的力度和速度。
这就是目前脑机接口最重要的研究方向之一:如何更好地重建“感觉”反馈。
除了“感觉”以外,第二个非常重要的事情就是 “训练”。
你可能没想过,脑机接口是需要训练的。
因为现在的脑机设备并不能做到像我们戴眼镜一样,戴上就能视力大增。想要顺畅使用脑机接口,需要使用者和机器不断磨合,持续训练才可以。
像利亚诺在开球之前,他经历了6个月的集中训练。从技术层面上看,“踢球”这个动作是很简单的,难点是“训练”过程有点反人类。
为什么这么说呢?
利亚诺是用非侵入脑机操控战甲的,他得戴一个电极帽,让科学家们采集他的大脑信号。在训练中,他的任务就是做“运动想象”。
我们一听“运动想象”,感觉很容易,是不是就是想象让我的腿“向前走”、“向后走”,而后机器呢,就会按照我们的想法走了呢?完全不是。
大脑解开的脑电范式非常有限。我们压根不知道这种复杂的运动活动,脑电反应是什么样的。所以利亚诺这样的受试者去做“运动想象”,具体想些什么呢?
他想象的是“眨眼”,或者想象“动舌头”。
这些信号是科学家可以采集到的,这就是“运动想象”。而后,科学家再把这个信号,翻译成让机器向前走的指令,这个过程是不是很拧巴 ??
而且,每个人的脑电范式都有非常大的差异,每一次一样的运动想象,大脑神经元的活动都是不一样的,这给脑控设备带来非常大的挑战。
外骨骼机器人也就是用脑机接口操控设备,其难度相当于一个“迷”,有的时候无从下手......
脑控打字
脑控打字至少要分成 3 步:
- 采集并翻译脑电信号;
- 转换成指令;
- 打字。
这里面有一步至关重要——转换成指令。
这是什么意思呢?
如果你记得巴西男孩操控机械战甲就会想起来,“指令” 其实靠的是被试者的 “运动想象” 去控制的。
也就是你想完成的任务是,让电脑光标向上移动,但你这时候想的却是“左腿踢腿”。
这个和我们大脑的正常活动差太多了。
Facebook在这个领域的研究很前沿,2017年 4 月的时候,他们的前沿科技研发部门就透露了脑控打字的研究。
当时可以做到每分钟打 8 个单词,已经是非常惊人的突破了。
这就相当于如果用智能手机打字,你打 3 个字的时候,瘫痪患者用意念也能打出 1 个字。
但就在 2019 年 4月 24 日,脑控打字已经 out 了,神经科学家们实现了脑电和语言的直接转换。
也就是说,你连上脑机接口之后,就会像霍金一样,机器可以帮你说出你的想法,每分钟可打 150 个单词,逼近了正常人说话的语速。
实现原理:https://www.youtube.com/watch?v=kbX9FLJ6WKw
主要是通过发声的动作捕捉脑信号,再利用循环神经网络算法将 声道的咬合关节运动 转化为句子,微信的语音转文字也是采用的此算法,虽然这个技术很NX,离商用还有很长的路要走,接下来基本交给材料科学家们。
本来想一笔带过的,但这个比较酷的样子,写一下神经科学家们是如何做到的吧。
神经科学家在训练的时候,研究人员会请受试者大声阅读大量的句子,比如说读一些小孩子的故事书,像《睡美人》《爱丽丝梦游仙境》这些经典小人书,而后他们把脑电信号和语言的转化工作分成俩步。
- 第一步,解锁发声动作。一个人说话的时候,他的下巴、喉咙、嘴唇和舌头的运动和发出的声音有很清晰的对应关系。比如你张大口,喉咙发出声音,可能就在说 “啊”。
- 第二步,他们成功解码了脑信号与发生动作的关系。同样是运用人工智能的算法,神经科学家们发现了哪一组信号对应哪个器官运动的组合。
仔细看看上图,有了发声动作这个中介,大脑中神秘的想法可以被清晰捕捉了。
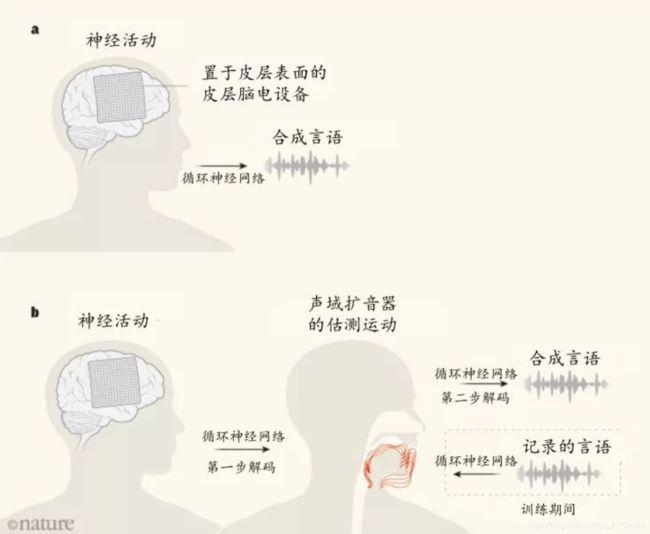
接着运用人工智能算法即 循环神经网络(RNN),这个算法能解码声道咬合关节的运动,再把这些运动转化为句子。
在这个成果发表之前,脑控打字一直是脑机沟通领域的热门的研究领域;脑控打字本质上我们还是在用语言交流,但这个成果完全改变了人的交互模式,未来人们之间的交流不再使用语言,而是通过身上的脑机接口设备直接脑对脑交流想法。
5G
如果您参加过类似 计算机、机器人大会,里面聚集了很多很多的人(大概近万),这时我们想拍个照片,想玩微信,可就是发不出去。
这近万的人数里在这个小范围里,无论是 Wi-Fi 还是 4G,都不可能上网,因为信息的流通量超过了网络的带宽;如同一条公路上堆满了车,这条路是谁也走不通的。
从理论上讲,4G 每平方公里只能支持 10 万个设备。
如果将来类似的场景随处可见,那么 4G 显然就不够用了。
那么什么情况会让上述情况变成常态呢 ??
比如要同时无线上网的设备数量增加一到两个数量级(也就是10~100倍),4G的带宽和并发能力就不够了。
万物互联(IoT)要是普遍发展,这种多设备同时上网的情况,4G是难以满足的。
而万物互联是未来的必然,以后的马桶都会联网的啦:马桶会根据人的消化物分析出数据,并交给医生,这样的治疗才是最好的,在没病之前就切断病根......
5G 的特点,除了 支撑海量并发设备 之外,还有:
- 宽带大、速度快;
- 高可靠、低时延连接。
5G 编码还是数学,如下图,这是华为的 5G 通信技术标准。
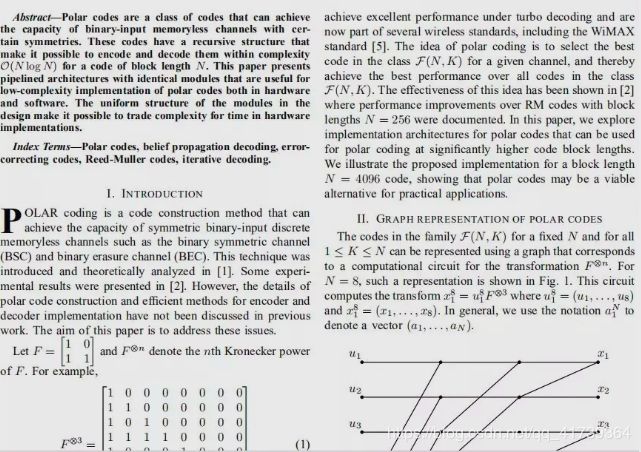
原文地址:《Channel Polarization: A Method for Constructing Capacity-Achieving Codes for Symmetric Binary-Input Memoryless Channels》,如果有线性代数或者群论的基础,看懂只是时间的问题啦。
这种方法被称为极化码,极化码看起来很复杂,但本质上还是一些矩阵的乘法,比如,如果要对 4 个比特的 [u1 u2 u3 u4] 用极化码编码,那会得到另外一个 4 比特的信号(码字) [x1 x2 x3 x4],这等价于以下的矩阵乘法:
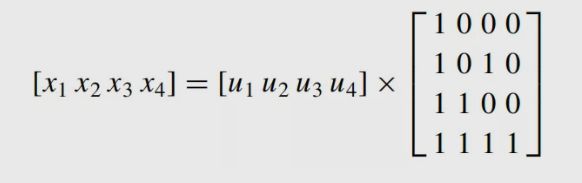
对于极化码来说,长度为 N 的数据块,其编码的复杂度是 ![]() 。
。
而根据祖师爷香农的判据,这已经到达了 5G 编码的最优极限,所以,华为看好极化码的未来,因为 TA 极富理论优势。
除了极化码以外呢,还有另一种 5G 编码标准,低密度奇偶校验码(LDPC 码)。
不过,我对其不了解,只知道 LDPC 码是在 3G和4G 的 Turbo码 上直接改进的,因此效果会比Turbo码好,也就比现在的 4G 要快;LDPC码被认为一种比较成熟的老牌编码方案,效果确实是不错的。
因此,在 5G 的方案中,就分为俩个阵营,分别以 华为(极化码) 和 高通 为代表(LDPC 码)。
华为提出的 5G 方案是在 6000 兆赫,也就是 Wi-Fi 之上 。
TA 的好处是技术简单,能较好地利用 4G 资源,绕过障碍物的能力强,但是带宽窄,速度受限;华为这个阵营里唱主角的还有英特尔和诺基亚,目前华为在中国试验的 5G NSA,就是基于 6000 兆赫频率,和 4G 相结合的过渡型 5G。
看一下这个,能快速帮您理解 《WIFI 信号传播原理》,绕过障碍物等等,是漫画喔。
而高通提出的方案则比较跃进,直接上到 28000 兆赫的频率,这样的好处是和目前所有的无线通信都不可能打架,而且带宽可以扩得非常宽。
但是技术复杂,特别是要考虑无线电波的反射效应,而且传输距离短。但是传输距离短又有距离短的好处,那就是基站可以建设得很小,很密集,辐射反而小,美国的一些城市决定采用这种方案。
也许您看不懂 6000 兆赫 和 28000 兆赫的频率,的确,是我没讲明白。
5G怎么就提高了移动通信的速度呢 ,一万多台汽车在路上怎么能保持交通,继续行驶呢 ??
我们用 4G 时,如果附近人多,速度也会跟不上,因为带宽不够了。
香农第二定律告诉我们说,必须增加无线通信的带宽,也就是扩路。
而无线通信带宽的频率是无法向下扩展的,一来那些频率已经被占用了,二来能够扩展的范围有限,因此TA只能向上扩展。
目前全世界 4G 通信的频率大约是在 1000 多兆赫到 2000 多兆赫的范围内,华为暂定为 6000 兆赫,高通定为 28000 兆赫,华为以后应该也会转为 28000 兆赫。
于是有争议了,5G 的通信标准是选 极化码 呢,还是 LDPC 码 呢 ???
在 5G 标准的制定中,经过复杂的博弈,最终形成了一个折衷方案:
- LDPC码成为数据信道的编码方案;极化码成为控制信道的编码方案。
控制信道好比给电脑硬盘通电的管制权,数据信道如有传输硬盘上的数据的权利;这就好像我们打开电脑时,电脑需要读取硬盘上的信息,这就需要给硬盘通电,这个通电过程就是由控制信号来传递的。
所以,这是一种现实的结果,华为虽然没有完胜,但也没有完败;高通也一样,最后的结果就是大家一起发展5G,谁也别把谁踢走。
从数据量来说,控制信道的数据量要小很多,码块长度一般在 20-300 比特之间——这就好像您不是要传输高清的电影数据,只是要把电脑打开,不需要那么多数据量来完成开机这个事情;而 5G 数据信道的码块长度要长得多,典型的数据量在 3000~8000 比特之间,而且码块非常多,其所传输的数据量比控制信道要高几个数量级。
所以,从数据量大小来说,LDPC码 取得的胜利更大一些,但这也不表示极化码失败了。
毕竟,极化码是一个新秀,还没有在实践上经过千锤百炼,所以只能等 5G 大规模商用以后,我们再来评估极化码的优越性到底是不是真的好。
5G 比起 4G ,是用更少的能量传输更多的信息,以后的机器人创业也望 5G 小哥多多提携,比如《5G和机器人的组合》。
VR
就在几年前,由于 Facebook 买了做 VR 眼镜的 Oculus 公司,TA在全世界着实热了几年,但是由于各种预先要求的技术没有达标,因此体验特别差,大家也就不再追捧TA了。
大家对 VR 最不适应的地方是头晕,我如果戴着 VR 头罩玩游戏,两三分钟就晕了。
头晕这个现象,并非是哪个使用者容易头晕,而是 VR 产品体验不好造成的,从技术上讲,今天的 VR 有三大技术难题没有解决。
首先是信息传递的速度不够快,今天 4G 网络的传输率虽然理论值很高,但是每个人实际上分到的也就是十几兆,而且还不稳定,这样当你的头一转动时,图像就跟不上,你就会觉得头晕。
VR需要的信息传输率要比高清电视高很多,因为我们看的高清电视,除了一开始的主帧是完整的图像,传输时没有太多的压缩,后面每一帧图像其实在传输时,只传输了TA们和主帧(或者前面几帧)的差异,传输率不需要很高。
但是你从 VR 眼镜中看到的图像则不同,你一扭头,看到的就是完全不同的场景了,需要传一个新的主帧,这对传输率的要求就高了。
那么传 VR 影像需要多高的传输率呢 ? ?
这和 VR 节目的信息压缩比有关,但通常认为至少需要高清(1080P)视频的 20 倍左右(至少要10倍),这样看到的画面才连贯,而 5G 的传输率就恰恰能够满足这个需求。
接下来的问题就是,当信息传输过来,VR设备的处理器能否复原出图像,如果这件事解决不了,就算有了 5G 也帮不了 VR 多大忙。
一般高清电视的解码是比较容易的,因为就是每一帧图像和前一帧对比,把差异补上去。但是使用 VR,除非你头不动,否则稍微动一动,就要从头开始计算,那个计算量就大了。
虽然今天最高速的 GPU 是能够满足这个要求的,但是TA们一来太耗电,二来太贵(上千美刀),这也是为什么无线的 VR 设备效果难以提升的原因,因为电池不够用。
就算上述问题得到了解决,今天 VR 还遇到一个根本性的障碍,TA是无法单纯依靠网速和处理器速度解决的,就是在没有反馈的情况下,快速变换的场景总是能够让人头晕。
我们坐车都有这样的体会,如果拐弯比较多,就会感到头晕,因为我们的身体(具体讲主要是前庭),来不及对外界的变化反应调整。但是,开车的人是不晕的,因为他看到变化的景物后身体有反馈,反馈让他能够提前调整身体的反应。
比如你开车在盘山公路上左拐下坡,你眼睛看着外面的情景,身体不自觉地在倾斜,脑子已经预估好了下坡的直线加速度和左拐的向心加速度,对你来讲这些都是很自然的。
你如果想拐得急一点,你的身体已经准备好了接受更大的加速度;但是你戴上 VR 头盔时,头运动所带来的景象变化,和身体的反应可是联系不起来的。
因此,最终,好的 VR 需要和可穿戴式设备结合,那就能够彻底解决头晕的问题了。
从上面的分析可以看出,虽然 5G 从理论上讲可以解决 VR 的信息传输问题,但是只是为 VR 的普及增加了一个必要条件,远没有充分。
ROS 机器人
ROS 现在已经做的很好了,入门很简单;您想要什么功能,大概只要调用程序即可.......
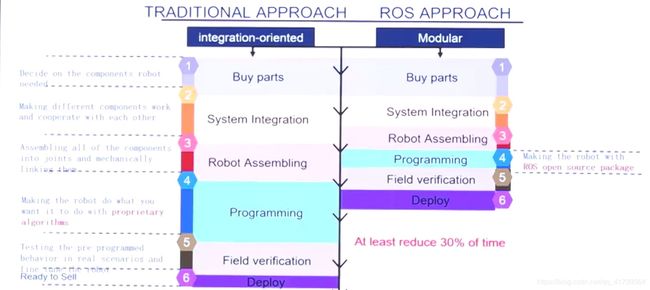
上图是开发一个机器人的完整步骤,因为有许多优秀的开源代码,开发效率至少提高了 ![]() %。
%。
现在的企业想要的人才,是开发型的;因为企业研究的功能,需要人才不仅仅能优化开源代码,甚至还需要自己写,没有软件工程的基础很难驾驭大型系统(几百万行代码)。
所谓的开发型人才,就是 不是特别擅长机器人,而是特别热爱机器人 ,自学前期待着、自学时专注着、自学后不满足着,这就是企业特别想要的;这是企业家说的,其实我觉得有点肤浅,我并不觉得一个与机器人有利益攸关的人会学的比热爱的人差,我认为利益攸关和寓教于乐是同一水平。
具体的学习计划,可以看看 YY硕 的《机器人工程师培养计划》。
推荐的网站:
- AI 大学 (未来会推出一系列机器人课程)
- ARM 计划
- 海渡学院(偏工业机器人)
- ros-courses
- ROS机器人小课堂(ROS是机器人操作系统的缩写)
ROS 在企业中的应用,以下的每一行,背后都有一段段的故事:
- 星火计划
- ARM 计划
- 软银机器人
- 自动驾驶的自主机器人
- 轩辕(国产机器人OS)
- 科大讯飞机器人
- 华为海思 Atlas AI 平台
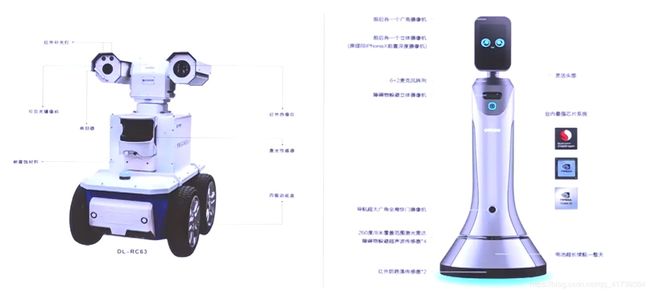 目前,市场份额最多的 ROS 机器人
目前,市场份额最多的 ROS 机器人
早期机器人是脚本写好的,也叫 “僵尸机器人”,多用于无人搬运车;
现在很多企业转用 ROS 了,因为 ROS 让机器人更加自主、智能,因为现代工厂的复杂要求,光产品的组成就十分复杂,路径随时都会变化,要让 “僵尸机器人” 适应环境的成本太大,总不能换一次产品,就把机器人生产线重新部署!!!
ROS 因为开源,好想法堆积,因此 ROS 也从集中式的转为分散式的,功能越来越完善。
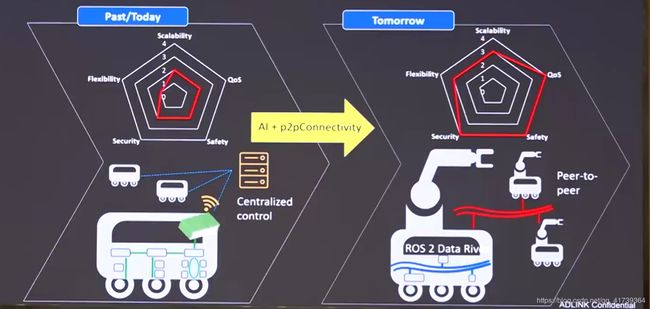
比如,ROS 2 可以同时操控 一百台 机器人,而 ROS 不能,因为基于 ROS 架构机器人的连接是在一起的,如果一个出错,整个系统都会出错,而 ROS 2 能区分开,这也就是 ROS 2 最核心的 “动态探索机制”。
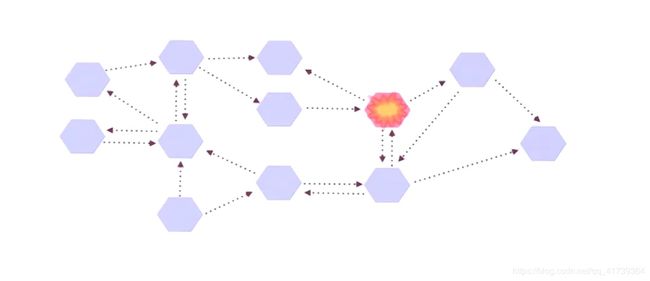
上图是 ROS 的程序设计,每个机器人都是一个结点,相互连接;红色的结点表示已损坏。
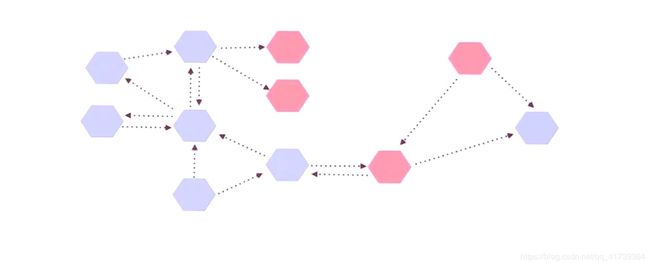
在 ROS 系统中,只要有一个结点损坏了。下一层损坏就开始了,直到所有结点损坏才结束。
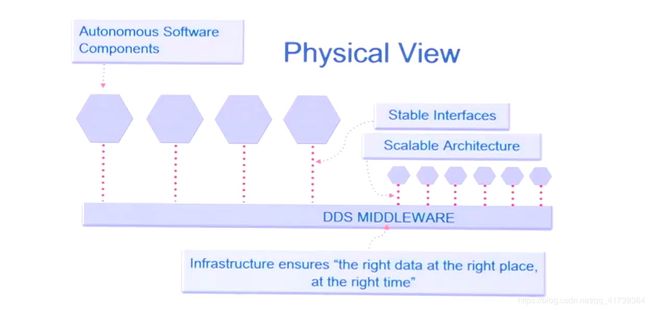
而 ROS 2 采用分散式的 DDS,一台损坏并不会影响到整体,功能完善了很多。
ROS 2 的故事:http://www.360doc.com/content/18/0830/09/57554683_782332787.shtml。
未来已来
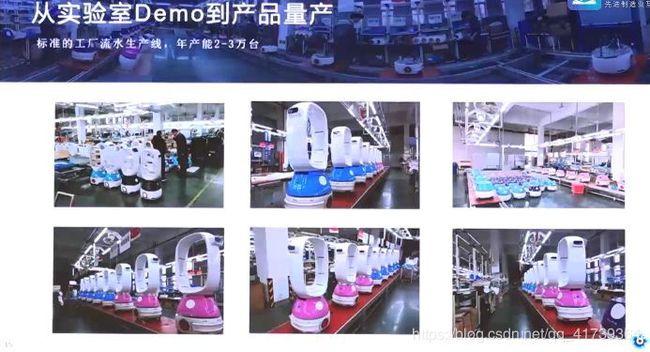
商用机器人的路子,已经开始了。
就拿服务业来说,擎郎的无人配送机器人,已经运用到 海底捞 等各大餐饮企业 300 + 的餐品传送,服务人数大概是 200万+。
一台机器人以租代售按每月 3000 RMB 来算,对于请人的综合成本要小很多(社保+工资+招工成本+管理费+食宿)。
这些机器人就像生产冰箱一样的敏捷,使得商用机器人规模化的普及。
一直觉得人工智能代替人还需要 N 年,原来就在今天;作为人口红利大国,机器人却是世界顶尖水平,人又该何去何从呢 ?
可能机器人也就是在发达地区应用吧,世界上有很多问题的答案都可以归结为一个:我们目前仍然生活在一个 78 亿人里有 60 亿人从来没坐过飞机的星球上。