东方马达步进电机AZM66AK-HS100+AZD-KD调试经验记录
东方马达步进电机AZM66AK-HS100+AZD-KD调试经验记录(20170803YC)
本次总结主要实现的功能如下:用MEXE02软件在步进电机驱动器中设置好控制动作,每个控制动作有一个特定的编号。之后通过PC和驱动器之间的485通讯,发送相关指令,使步进电机按照一定编号的控制动作运转。
参考资料:东方马达步进电机AZM66AK-HS100+AZD-KD的产品手册,可在官网下载。
A.接线
接线图如下:

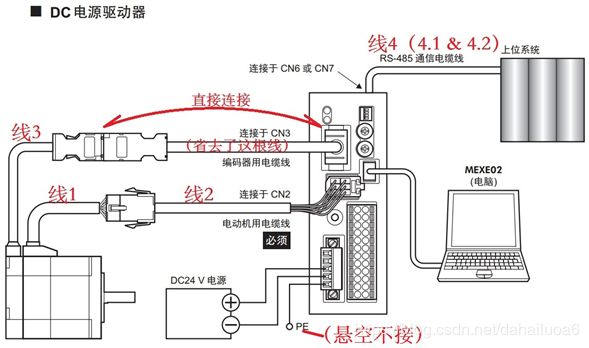
上图各接线说明如下:
| 编号 |
说明 |
备注 |
| 线1 |
线1和线2连接电机和驱动器。 |
|
| 线2 |
线1和线2连接电机和驱动器。 |
|
| 线3 |
线3连接电机的编码器部分和驱动器。 |
|
| 线4.1 |
线4.1:驱动器上的网络插口←→USB转485线 |
|
| 线4.2 |
线4.2:USB转485线→PC(串口调试助手) |
|
此外,电源方面,接DC24V,PE端子悬空不接。
【注意】接线方面:
a.若要“MEXE02软件控制电机”,断开线4,连接电脑和驱动器之间的那根线;
b.若要“以485通讯的方式让电机执行相应编号的控制动作”,在用MEXE02软件对驱动器配置好的基础上,断开连接电脑和驱动器之间的那根线,连接线4。
说明(20170923YC):
线4的具体接法记录:
步进电机驱动器上的网口←→网线←→USB转485线
其中,网线上的TR+线接USB转485线上的T/R+端子,网线上的TR-线接USB转485线上的T/R-端子。
B.MEXE02软件控制电机
1、在MEXE02上新建工程:
参考手册:《MEXE02使用手册_英文详细版_手册编号HM-60131-2E》
手册路径:G:\激光扫描建模_长沙项目_2016_2019\平台搭建→电控(东方马达)器件手册_20170511
参考上述手册第4、5章,也即第15~18页。新建工程后别忘了及时保存。
2、驱动器上的配置:
在驱动器上有3个可供选择配置的旋钮/开关,按照下表进行配置。配制完毕之后需要重新断电、上电,才能使得配置生效。
| 配置项 |
配置内容 |
|
| BAUD |
7 |
|
| ID |
1 |
|
| SW1 |
1 |
ON |
| 2 |
OFF |
|
| 3 |
OFF |
|
| 4 |
OFF |
|
3、之后配置电机运行的原点,在配置完原点之后,才能用MEXE02控制步进电机:
参考手册:《AZ系列 DC电源输入 内藏定位功能型 使用说明书 驱动器篇》
手册路径:G:\激光扫描建模_长沙项目_2016_2019\平台搭建→电控(东方马达)器件手册_20170511
参考上述手册“11-1 原点确定的指导”,也即第28页。
4、启动示教运行:
参考手册:《AZ系列 DC电源输入 内藏定位功能型 使用说明书 驱动器篇》
手册路径:G:\激光扫描建模_长沙项目_2016_2019\平台搭建→电控(东方马达)器件手册_20170511
参考上述手册“11-2 定位运行的指导”、“11-3 高速原点返回运行指导”,从第29页开始。
备注:若配置不当,可能会出现如下错误:(20170803YC)

附录:

| Absolute positioning |
绝对定位 |
| Incremental positioning |
增量定位 |
| Continuous |
连续 |
| Wrap absolute positioning |
用绝对定位 |
| Wrap proximity positioning |
包装接近定位 |
| Wrap absolute positioning |
用绝对定位 |
| Wrap absolute push-motion |
绝对推力运动 |
| Wrap proximity push-motion |
包装近推运动 |
| Wrap push-motion |
把运动包 |
| Absolute push-motion |
绝对的推动作 |
| Incremental push-motion |
增量推进运动 |
C.以485通讯的方式让电机执行相应编号的控制动作
1、按照上一小节的方法使得MEXE02和电机之间建立通讯,设置好各个编号的动作,类似下图:

之后,从PC写入驱动器数据,操作方法:

点击上图所示红圈中的小图标,之后在弹出框中发直接点击OK。
2、更改驱动器上的配置:
在驱动器上有3个可供选择配置的旋钮/开关,按照下表进行配置。配制完毕之后需要重新断电、上电,才能使得配置生效。
| 配置项 |
配置内容 |
|
| BAUD |
4 |
|
| ID |
1 |
|
| SW1 |
1 |
OFF |
| 2 |
ON |
|
| 3 |
ON |
|
| 4 |
ON |
|
3、接线无误后(连接线4),打开串口调试助手,串口设置如下:

也即串口调试助手上的设置需要和MEXE02中对驱动器的通讯设置保持一致。
可以试发送如下指令,让电机执行编号为No.0的控制动作:

(→截图源自手册《AZ 系列 功能篇》P267)
01 10 00 7C 00 02 04 00 00 00 08 F5 18
注意:串口调试助手中以Hex的格式发送和接收!
之后,可以观察到电机的旋转。
如此,即已实现了通过485通讯的方式,用指令控制步进电机以一定编号的控制动作运转。(20170803YC)
补充:20180506电机调试经验(电机初始位置配置)(YC)
给电机设置坐标原点的问题:
给电机设置坐标原点的时候,电机转轴的位置姿态如下图所示:
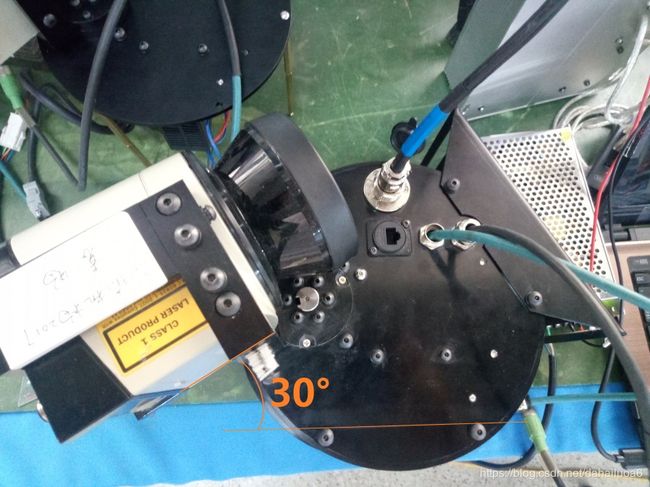
注意:电机驱动器显示红灯的时候,说明有故障。这种故障可能是由于接线没接好造成的。此时无法给电机设置转动原点,需要排除故障之后再设置转动原点。排除故障后,给电机断电、再上电,灯才会由红色变为绿色。
D.步进电机动作规划(20170804YC)
如下是1个扫描周期:
STEP 1:从原点开始,旋转到位置+10°;
STEP 2:从位置+10°开始,逆时针旋转(俯视)170°,其中最开始和最末尾的10°是加减速区域,最中间的150°应保证是匀速区域;
STEP3:从上一步的结束位置开始,顺时针旋转(俯视)170°,其中最开始和最末尾的10°是加减速区域,最中间的150°应保证是匀速区域;
STEP4:从上一步的结束位置开始,执行返回原点指令。
1个扫描周期对应2个匀速150°区间,在这2个区间内激光雷达分别进行2次连续采样,也即上述1个扫描周期对应2个(激光雷达的)采样周期。
上述周期对应下图(俯视):
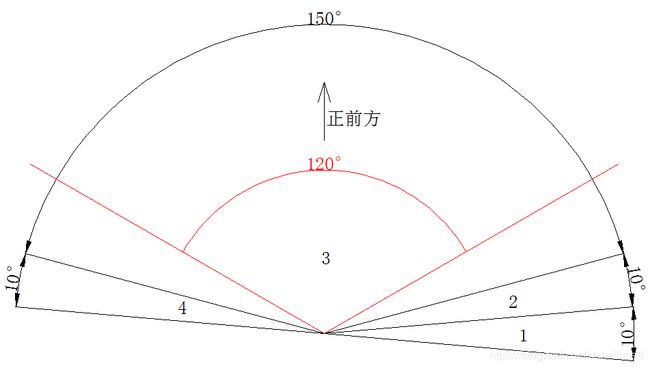
(↑20170915改)
区间1:用于消除累计误差,让步进电机返回原点用;
区间2:加/减速区间;
区间3:匀速区间;
区间4:加/减速区间。
所需要的指令类型(通过MEXE02在步进电机驱动器中写入):
绝对定位指令(将位置设置成正/负可使电机正/反向运转)、回归原点指令。
现对上述指令进行测试如下:
1、MEXE02中的配置:

(经测试,上述配置中,25000步对应180°)(20170804YC)
2、运行编号0动作:
以485通讯的方式,发送指令:(START输入ON (运行No.0开始运行))
01 10 00 7C 00 02 04 00 00 00 08 F5 18
(→参考手册《AZ 系列 功能篇》P267)
正确情况下收到的回馈:
01 10 00 7C 00 02 80 10
之后再发送指令:(START输入OFF)
01 10 00 7C 00 02 04 00 00 00 00 F4 DE
正确情况下收到的回馈:
01 10 00 7C 00 02 80 10
3、返回原点:(→参考手册《AZ 系列 功能篇》P280:“8-4 高速原点返回运行”)
以485通讯的方式,发送指令:(发送以下查询,将ZHOME设为ON。开始高速原点返回运行。)
01 06 00 7D 00 10 18 1E
正确情况下收到的回馈:
01 06 00 7D 00 10 18 1E
之后再发送指令:(高速原点返回运行结束后,先发送以下查询,再将ZHOME恢复为OFF。)
01 06 00 7D 00 00 19 D2
正确情况下收到的回馈:
01 06 00 7D 00 00 19 D2
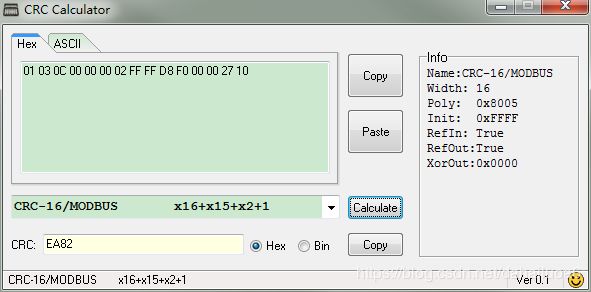
附录:CRC校验码计算工具使用方法记录(20170919YC)
所用工具:
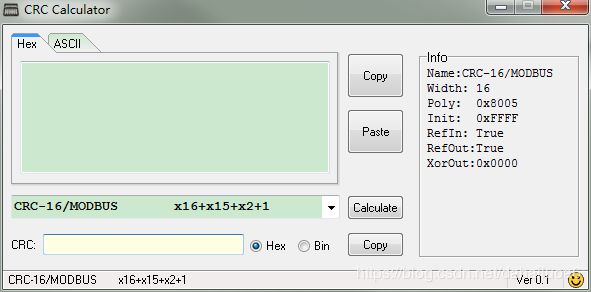
工具路径:
E:\CRC校验码计算工具_20170919YC
以手册中的如下通讯码为测试对象:
①
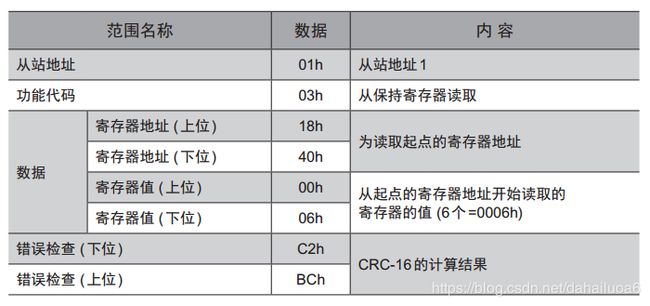
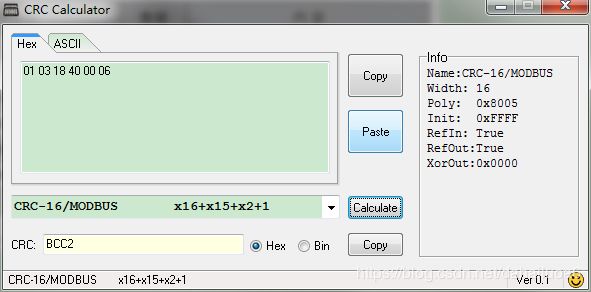
可以用软件得出正确的计算结果(反序的):
【↓注意计算方式选择CRC-16/MODBUS】
②
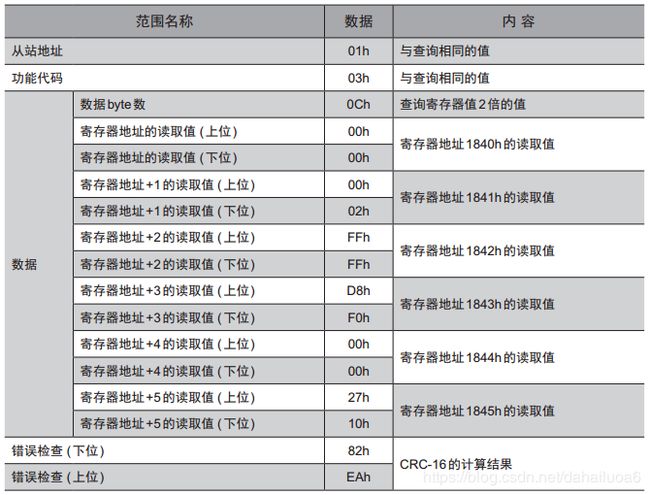
可以用软件得出正确的计算结果(反序的):
【↓注意计算方式选择CRC-16/MODBUS】