nRF SPI 与 TWI 操作相关 (BMI088 与 MLX90614 举例)
SPI0 与 TWI0 的 ID相同,SPI0 与 TWI0 的 ID相同。编译时有报错

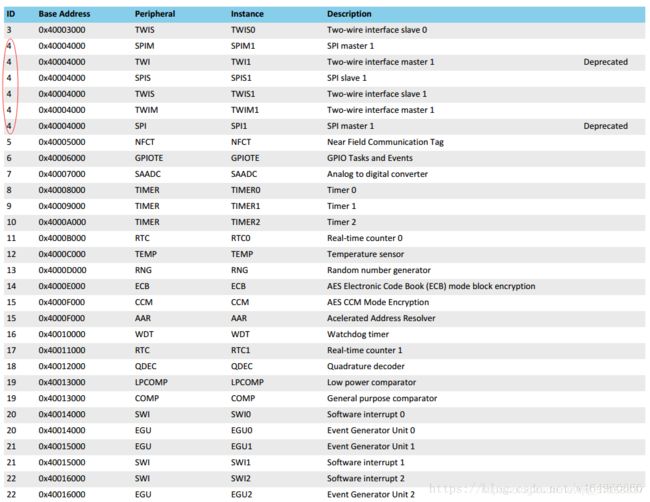
若要避免,有两个方法
1、使用不同ID外设
2、使用模拟SPI或模拟IIC
nRF SPI 初始化
sdk_config.h 中:
添加:
// Application
//==========================================================
// SPI_CONFIGURATION - Spi configuration
//==========================================================
// SPI_BMI088_SCK_PIN - Pin number
// <0=> 0 (P0.0)
// <1=> 1 (P0.1)
// <2=> 2 (P0.2)
// <3=> 3 (P0.3)
// <4=> 4 (P0.4)
// <5=> 5 (P0.5)
// <6=> 6 (P0.6)
// <7=> 7 (P0.7)
// <8=> 8 (P0.8)
// <9=> 9 (P0.9)
// <10=> 10 (P0.10)
// <11=> 11 (P0.11)
// <12=> 12 (P0.12)
// <13=> 13 (P0.13)
// <14=> 14 (P0.14)
// <15=> 15 (P0.15)
// <16=> 16 (P0.16)
// <17=> 17 (P0.17)
// <18=> 18 (P0.18)
// <19=> 19 (P0.19)
// <20=> 20 (P0.20)
// <21=> 21 (P0.21)
// <22=> 22 (P0.22)
// <23=> 23 (P0.23)
// <24=> 24 (P0.24)
// <25=> 25 (P0.25)
// <26=> 26 (P0.26)
// <27=> 27 (P0.27)
// <28=> 28 (P0.28)
// <29=> 29 (P0.29)
// <30=> 30 (P0.30)
// <31=> 31 (P0.31)
// <32=> 32 (P1.0)
// <33=> 33 (P1.1)
// <34=> 34 (P1.2)
// <35=> 35 (P1.3)
// <36=> 36 (P1.4)
// <37=> 37 (P1.5)
// <38=> 38 (P1.6)
// <39=> 39 (P1.7)
// <40=> 40 (P1.8)
// <41=> 41 (P1.9)
// <42=> 42 (P1.10)
// <43=> 43 (P1.11)
// <44=> 44 (P1.12)
// <45=> 45 (P1.13)
// <46=> 46 (P1.14)
// <47=> 47 (P1.15)
// <4294967295=> Not connected
#ifndef SPI_BMI088_SCK_PIN
#define SPI_BMI088_SCK_PIN 45
#endif
// SPI_BMI088_MISO_PIN - Pin number
// <0=> 0 (P0.0)
// <1=> 1 (P0.1)
// <2=> 2 (P0.2)
// <3=> 3 (P0.3)
// <4=> 4 (P0.4)
// <5=> 5 (P0.5)
// <6=> 6 (P0.6)
// <7=> 7 (P0.7)
// <8=> 8 (P0.8)
// <9=> 9 (P0.9)
// <10=> 10 (P0.10)
// <11=> 11 (P0.11)
// <12=> 12 (P0.12)
// <13=> 13 (P0.13)
// <14=> 14 (P0.14)
// <15=> 15 (P0.15)
// <16=> 16 (P0.16)
// <17=> 17 (P0.17)
// <18=> 18 (P0.18)
// <19=> 19 (P0.19)
// <20=> 20 (P0.20)
// <21=> 21 (P0.21)
// <22=> 22 (P0.22)
// <23=> 23 (P0.23)
// <24=> 24 (P0.24)
// <25=> 25 (P0.25)
// <26=> 26 (P0.26)
// <27=> 27 (P0.27)
// <28=> 28 (P0.28)
// <29=> 29 (P0.29)
// <30=> 30 (P0.30)
// <31=> 31 (P0.31)
// <32=> 32 (P1.0)
// <33=> 33 (P1.1)
// <34=> 34 (P1.2)
// <35=> 35 (P1.3)
// <36=> 36 (P1.4)
// <37=> 37 (P1.5)
// <38=> 38 (P1.6)
// <39=> 39 (P1.7)
// <40=> 40 (P1.8)
// <41=> 41 (P1.9)
// <42=> 42 (P1.10)
// <43=> 43 (P1.11)
// <44=> 44 (P1.12)
// <45=> 45 (P1.13)
// <46=> 46 (P1.14)
// <47=> 47 (P1.15)
// <4294967295=> Not connected
#ifndef SPI_BMI088_MISO_PIN
#define SPI_BMI088_MISO_PIN 47
#endif
// SPI_BMI088_MOSI_PIN - Pin number
// <0=> 0 (P0.0)
// <1=> 1 (P0.1)
// <2=> 2 (P0.2)
// <3=> 3 (P0.3)
// <4=> 4 (P0.4)
// <5=> 5 (P0.5)
// <6=> 6 (P0.6)
// <7=> 7 (P0.7)
// <8=> 8 (P0.8)
// <9=> 9 (P0.9)
// <10=> 10 (P0.10)
// <11=> 11 (P0.11)
// <12=> 12 (P0.12)
// <13=> 13 (P0.13)
// <14=> 14 (P0.14)
// <15=> 15 (P0.15)
// <16=> 16 (P0.16)
// <17=> 17 (P0.17)
// <18=> 18 (P0.18)
// <19=> 19 (P0.19)
// <20=> 20 (P0.20)
// <21=> 21 (P0.21)
// <22=> 22 (P0.22)
// <23=> 23 (P0.23)
// <24=> 24 (P0.24)
// <25=> 25 (P0.25)
// <26=> 26 (P0.26)
// <27=> 27 (P0.27)
// <28=> 28 (P0.28)
// <29=> 29 (P0.29)
// <30=> 30 (P0.30)
// <31=> 31 (P0.31)
// <32=> 32 (P1.0)
// <33=> 33 (P1.1)
// <34=> 34 (P1.2)
// <35=> 35 (P1.3)
// <36=> 36 (P1.4)
// <37=> 37 (P1.5)
// <38=> 38 (P1.6)
// <39=> 39 (P1.7)
// <40=> 40 (P1.8)
// <41=> 41 (P1.9)
// <42=> 42 (P1.10)
// <43=> 43 (P1.11)
// <44=> 44 (P1.12)
// <45=> 45 (P1.13)
// <46=> 46 (P1.14)
// <47=> 47 (P1.15)
// <4294967295=> Not connected
#ifndef SPI_BMI088_MOSI_PIN
#define SPI_BMI088_MOSI_PIN 46
#endif
// SPI_BMI088_SS_PIN - Pin number
// <0=> 0 (P0.0)
// <1=> 1 (P0.1)
// <2=> 2 (P0.2)
// <3=> 3 (P0.3)
// <4=> 4 (P0.4)
// <5=> 5 (P0.5)
// <6=> 6 (P0.6)
// <7=> 7 (P0.7)
// <8=> 8 (P0.8)
// <9=> 9 (P0.9)
// <10=> 10 (P0.10)
// <11=> 11 (P0.11)
// <12=> 12 (P0.12)
// <13=> 13 (P0.13)
// <14=> 14 (P0.14)
// <15=> 15 (P0.15)
// <16=> 16 (P0.16)
// <17=> 17 (P0.17)
// <18=> 18 (P0.18)
// <19=> 19 (P0.19)
// <20=> 20 (P0.20)
// <21=> 21 (P0.21)
// <22=> 22 (P0.22)
// <23=> 23 (P0.23)
// <24=> 24 (P0.24)
// <25=> 25 (P0.25)
// <26=> 26 (P0.26)
// <27=> 27 (P0.27)
// <28=> 28 (P0.28)
// <29=> 29 (P0.29)
// <30=> 30 (P0.30)
// <31=> 31 (P0.31)
// <32=> 32 (P1.0)
// <33=> 33 (P1.1)
// <34=> 34 (P1.2)
// <35=> 35 (P1.3)
// <36=> 36 (P1.4)
// <37=> 37 (P1.5)
// <38=> 38 (P1.6)
// <39=> 39 (P1.7)
// <40=> 40 (P1.8)
// <41=> 41 (P1.9)
// <42=> 42 (P1.10)
// <43=> 43 (P1.11)
// <44=> 44 (P1.12)
// <45=> 45 (P1.13)
// <46=> 46 (P1.14)
// <47=> 47 (P1.15)
// <4294967295=> Not connected
#ifndef SPI_BMI088_SS_PIN
#define SPI_BMI088_SS_PIN 8
#endif
// SPI_IRQ_PRIORITY - Interrupt priority
// Priorities 0,2 (nRF51) and 0,1,4,5 (nRF52) are reserved for SoftDevice
// <0=> 0 (highest)
// <1=> 1
// <2=> 2
// <3=> 3
// <4=> 4
// <5=> 5
// <6=> 6
// <7=> 7
#ifndef SPI_IRQ_PRIORITY
#define SPI_IRQ_PRIORITY 2
#endif
//
//==========================================================
勾选:
nRF_Drivers --> NRFX_SPIM_ENABLED
nRF_Drivers --> NRFX_SPI_ENABLED
nRF_Drivers --> SPI_ENABLED
nRF_Drivers --> SPI_ENABLED --> SPI0_ENABLED
nRF_Drivers --> SPI_ENABLED --> SPI0_ENABLED --> SPI0_USE_EASY_DMA
注:
记得打开 SPI0_USE_EASY_DMA,SPI 读写不占用MCU资源,大大提高效率,
nrf_drv_spi.h 中:
#define NRF_DRV_SPI_DEFAULT_CONFIG \
{ \
.sck_pin = NRF_DRV_SPI_PIN_NOT_USED, \
.mosi_pin = NRF_DRV_SPI_PIN_NOT_USED, \
.miso_pin = NRF_DRV_SPI_PIN_NOT_USED, \
.ss_pin = NRF_DRV_SPI_PIN_NOT_USED, \
.irq_priority = SPI_DEFAULT_CONFIG_IRQ_PRIORITY, \
.orc = 0xFF, \
.frequency = NRF_DRV_SPI_FREQ_8M, \
.mode = NRF_DRV_SPI_MODE_0, \
.bit_order = NRF_DRV_SPI_BIT_ORDER_MSB_FIRST, \
}注:
1、设定的 spi 模式,要与传感器对应

2、设定的 spi 的频率要在传感器支持的频率范围内
3、设定的 bit_order 要与传感器的数据排序一致,MSB_FIRST or LSB_FIRST
main.c 中:
#define SPI_INSTANCE_0 0 /**< SPI instance index. */
static const nrf_drv_spi_t spi_0_bmi088 = NRF_DRV_SPI_INSTANCE(SPI_INSTANCE_0); /**< SPI instance. */
static void spi_bmi088_event_handler(nrf_drv_spi_evt_t const * p_event,
void * p_context)
{
spi_bmi088_xfer_done = true;
// NRF_LOG_INFO("Spi bmi088 transfer completed.");
}
static void spi_bmi088_init(void)
{
nrf_drv_spi_config_t spi_bmi088_config = NRF_DRV_SPI_DEFAULT_CONFIG;
spi_bmi088_config.ss_pin = NRF_DRV_SPI_PIN_NOT_USED;
spi_bmi088_config.miso_pin = SPI_BMI088_MISO_PIN;
spi_bmi088_config.mosi_pin = SPI_BMI088_MOSI_PIN;
spi_bmi088_config.sck_pin = SPI_BMI088_SCK_PIN;
APP_ERROR_CHECK(nrf_drv_spi_init(&spi_0_bmi088, &spi_bmi088_config, spi_bmi088_event_handler, NULL));
}注:
1、若 cs 片选引脚信号为高使能,或需要操控多个 cs 片选脚时,需在设置时将 .ss_pin 参数留空,另外将其设为输出脚并将其拉高(拉低),在发送或接收时拉低(拉高)。(因为nRF SPI 底层驱动库仅支持 cs 片选引脚低使能)
///< Slave Select pin number (optional).
/**< Set to @ref NRF_DRV_SPI_PIN_NOT_USED
* if this signal is not needed. The driver
* supports only active low for this signal.
* If the signal should be active high,
* it must be controlled externally. */
2、nrf_drv_spi_init 初始化参数中,若回调函数留空则将以阻塞模式执行传输。 Event handler provided by the user. If NULL, transfers will be performed in blocking mode.
nRF 的 SPI 发送与接收做成了一体,收发都需要调用 nrf_drv_spi_transfer:
1、做发送时
nrf_drv_spi_transfer(&spi_0_bmi088, m_tx_buf, m_tx_length, NULL, 0)
发送的数据 m_tx_buf 内容为 :
m_tx_buf[0] = reg_addr
memcpy(&m_tx_buf[1], data, len);
首字节为寄存器地址,(注:需要做偏移,例如,最高位读写位为0时为写,则需 & 0x7F
从第二个字节开始为要写入的数据)
发送的数据长度 m_tx_length
必须是写入数据的长度 + 1(寄存器地址)
接收BUF及接收数据长度留空
2、做接收时
nrf_drv_spi_transfer(&spi_0_bmi088, m_tx_buf, m_tx_length, data, m_rx_length)
发送的数据 m_tx_buf 内容为 :
uint8_t m_tx_buf[1] = {reg_addr};
首字节为寄存器地址,(注:需要做偏移,例如,最高位读写位为1时为读,则需 | 0x80
从第二个字节开始为要写入的数据)
发送的数据长度 m_tx_length = 1;
接收数据长度根据数据而定
注:特别注意冗余数据处理,(具体参考2_Vibration_measurer-Github 项目)=
例:
/*!
* @brief Function for reading the sensor's registers through SPI bus.
*
* @param[in] cs_pin : Chip selection pin.
* @param[in] reg_addr : Register address.
* @param[in] data : Pointer to the data buffer to store the read data.
* @param[in] len : No of bytes to read.
*
* @return Status of execution
* @retval 0 -> Success
* @retval >0 -> Failure Info
*
*/
int8_t user_bmi088_spi_write(uint8_t cs_pin, uint8_t reg_addr, uint8_t *data, uint16_t len)
{
if (cs_pin == MCU_GPIO_BMI088_CSB1)
{
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB2);
nrf_gpio_pin_clear(MCU_GPIO_BMI088_CSB1);
}
else if (cs_pin == MCU_GPIO_BMI088_CSB2)
{
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB1);
nrf_gpio_pin_clear(MCU_GPIO_BMI088_CSB2);
}
else
{
return -2;
}
nrf_delay_us(1);
if (len <= 32)
{
uint8_t m_tx_buf[33] = {0};
m_tx_buf[0] = reg_addr;
uint8_t m_tx_length = ((uint8_t)len) + 1;
memcpy(&m_tx_buf[1], data, len);
spi_bmi088_xfer_done = false;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi_0_bmi088, m_tx_buf, m_tx_length, NULL, 0));
while(spi_bmi088_xfer_done == false)
{
__WFE();
}
}
else
{
NRF_LOG_INFO("Spi write over length.");
}
nrf_delay_us(1);
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB1);
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB2);
return 0;
}
/*!
* @brief Function for writing the sensor's registers through SPI bus.
*
* @param[in] cs_pin : Chip selection pin.
* @param[in] reg_addr : Register address.
* @param[out]data : Pointer to the data buffer whose value is to be written.
* @param[in] len : No of bytes to write.
*
* @return Status of execution
* @retval 0 -> Success
* @retval >0 -> Failure Info
*
*/
int8_t user_bmi088_spi_read(uint8_t cs_pin, uint8_t reg_addr, uint8_t *data, uint16_t len)
{
if (cs_pin == MCU_GPIO_BMI088_CSB1)
{
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB2);
nrf_gpio_pin_clear(MCU_GPIO_BMI088_CSB1);
}
else if (cs_pin == MCU_GPIO_BMI088_CSB2)
{
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB1);
nrf_gpio_pin_clear(MCU_GPIO_BMI088_CSB2);
}
else
{
return -2;
}
nrf_delay_us(1);
if (len <= 32)
{
uint8_t m_tx_buf[1] = {reg_addr};
uint8_t m_tx_length = 1;
uint8_t m_rx_length = (uint8_t)len + 1; // Add the byte sent
uint8_t m_rx_buf[33] = {0};
spi_bmi088_xfer_done = false;
APP_ERROR_CHECK(nrf_drv_spi_transfer(&spi_0_bmi088, m_tx_buf, m_tx_length, m_rx_buf, m_rx_length));
while(spi_bmi088_xfer_done == false)
{
__WFE();
}
memcpy(data, &m_rx_buf[1], (m_rx_length - 1));
}
else
{
NRF_LOG_INFO("Spi read over length.");
}
nrf_delay_us(1);
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB1);
nrf_gpio_pin_set(MCU_GPIO_BMI088_CSB2);
return 0;
}
nRF TWI 初始化
sdk_config.h 中:
勾选:
NRFX_TWIM_ENABLED --> NRFX_TWIM_ENABLED
NRFX_TWIM_ENABLED --> NRFX_TWI_ENABLED
NRFX_TWIM_ENABLED --> NRFX_TWI_ENABLED --> TWI1_ENABLED
NRFX_TWIM_ENABLED --> NRFX_TWI_ENABLED --> TWI1_ENABLED -->TWI1_USE_EASY_DMA
修改:
TWI_DEFAULT_CONFIG_FREQUENCY 26738688
TWI_DEFAULT_CONFIG_CLR_BUS_INIT 0
TWI_DEFAULT_CONFIG_HOLD_BUS_UNINIT 0
TWI_DEFAULT_CONFIG_IRQ_PRIORITY 2
nrf_drv_twi.h 中:
#define NRF_DRV_TWI_DEFAULT_CONFIG \
{ \
.frequency = (nrf_drv_twi_frequency_t)TWI_DEFAULT_CONFIG_FREQUENCY, \
.scl = 0xFF, \
.sda = 0xFF, \
.interrupt_priority = TWI_DEFAULT_CONFIG_IRQ_PRIORITY, \
.clear_bus_init = TWI_DEFAULT_CONFIG_CLR_BUS_INIT, \
.hold_bus_uninit = TWI_DEFAULT_CONFIG_HOLD_BUS_UNINIT, \
}main.c 中:
static void twi_mlx90614_handler(nrf_drv_twi_evt_t const * p_event, void * p_context)
{
switch (p_event->type)
{
case NRF_DRV_TWI_EVT_DONE:
{
if (p_event->xfer_desc.type == NRF_DRV_TWI_XFER_TX)
{
NRF_LOG_INFO("Twi mlx90614 tx evt done.");
}
else if (p_event->xfer_desc.type == NRF_DRV_TWI_XFER_RX)
{
NRF_LOG_INFO("Twi mlx90614 rx evt done.");
}
else if (p_event->xfer_desc.type == NRF_DRV_TWI_XFER_TXRX)
{
NRF_LOG_INFO("Twi mlx90614 txrx evt done.");
}
else if (p_event->xfer_desc.type == NRF_DRV_TWI_XFER_TXTX)
{
NRF_LOG_INFO("Twi mlx90614 txtx evt done.");
}
twi_mlx90614_xfer_done = true;
} break;
case NRF_DRV_TWI_EVT_ADDRESS_NACK:
NRF_LOG_ERROR("Error event: NACK received after sending the address.");
break;
case NRF_DRV_TWI_EVT_DATA_NACK:
NRF_LOG_ERROR("Error event: NACK received after sending a data byte.");
break;
default:
break;
}
}
static void twi_mlx90614_init(void)
{
ret_code_t err_code;
nrf_drv_twi_config_t twi_mlx90614_config = NRF_DRV_TWI_DEFAULT_CONFIG;
twi_mlx90614_config.scl = TWI_MLX90614_SCL_PIN,
twi_mlx90614_config.sda = TWI_MLX90614_SDA_PIN,
err_code = nrf_drv_twi_init(&twi_1_mlx90614, &twi_mlx90614_config, twi_mlx90614_handler, NULL);
APP_ERROR_CHECK(err_code);
nrf_drv_twi_enable(&twi_1_mlx90614);
}nRF 的 TWI 发送调用 nrf_drv_twi_tx,接收调用 nrf_drv_twi_rx。具体时序依照传感器数据手册
例如 mlx90614:
uint8_t PEC_Calculation(uint8_t pec[])
{
uint8_t crc[6];
uint8_t BitPosition = 47;
uint8_t shift;
uint8_t i;
uint8_t j;
uint8_t temp;
do
{
/*Load pattern value 0x000000000107*/
crc[5] = 0;
crc[4] = 0;
crc[3] = 0;
crc[2] = 0;
crc[1] = 0x01;
crc[0] = 0x07;
/*Set maximum bit position at 47 ( six bytes byte5...byte0,MSbit=47)*/
BitPosition = 47;
/*Set shift position at 0*/
shift = 0;
/*Find first "1" in the transmited message beginning from the MSByte byte5*/
i = 5;
j = 0;
while (((pec[i] & (0x80 >> j)) == 0) && (i > 0))
{
BitPosition--;
if (j < 7)
{
j++;
}
else
{
j = 0x00;
i--;
}
}/*End of while */
/*Get shift value for pattern value*/
shift = BitPosition - 8;
/*Shift pattern value */
while(shift)
{
for(i = 5; i < 0xFF; i--)
{
if((crc[i-1] & 0x80) && (i > 0))
{
temp = 1;
}
else
{
temp = 0;
}
crc[i] <<= 1;
crc[i] += temp;
}/*End of for*/
shift--;
}/*End of while*/
/*Exclusive OR between pec and crc*/
for(i = 0; i <= 5; i++)
{
pec[i] ^= crc[i];
}/*End of for*/
} while(BitPosition > 8); /*End of do-while*/
return pec[0];
}
uint16_t SMBus_Read_Memory(uint8_t slave_Address, uint8_t command)
{
ret_code_t err_code;
uint16_t data; // Data storage (DataH:DataL)
uint8_t Pec; // PEC byte storage
uint8_t PecReg; // Calculated PEC byte storage
uint8_t arr[6]; // Buffer for the sent bytes
uint8_t DataL = 0; // Low data byte storage
uint8_t DataH = 0; // High data byte storage
uint8_t Error_Counter; // Defines the number of the attempts for communication with MLX90614
uint8_t rx_data[3] = {0}; // Data received from twi
uint8_t tx_data[1] = {command}; // Data sent from twi
Error_Counter = 0x00; // Initialising of Error_Counter
slave_Address <<= 1; // 2-7 bits indicate the slave address
do
{
err_code = nrf_drv_twi_tx(&twi_1_mlx90614, slave_Address, tx_data, 1, true);
APP_ERROR_CHECK(err_code);
twi_mlx90614_xfer_done = false;
while(twi_mlx90614_xfer_done == false);
{
__WFE();
}
err_code = nrf_drv_twi_rx(&twi_1_mlx90614, slave_Address, rx_data, 3);
APP_ERROR_CHECK(err_code);
twi_mlx90614_xfer_done = false;
while(twi_mlx90614_xfer_done == false);
{
__WFE();
}
DataL = rx_data[0];
DataH = rx_data[1];
Pec = rx_data[2];
arr[5] = slave_Address;
arr[4] = command;
arr[3] = slave_Address + 1;
arr[2] = DataL;
arr[1] = DataH;
arr[0] = 0;
PecReg = PEC_Calculation(arr); // Calculate CRC
} while(PecReg != Pec); // If received and calculated CRC are equal go out from do-while{}
data = (DataH << 8) | DataL; // data = DataH:DataL
return data;
}
static float SMBus_Read_Ambient_Temp(void)
{
return SMBus_Read_Memory(SA, (RAM_ACCESS | RAM_TA)) * 0.02 - 273.15;
}
static float SMBus_Read_Object_Temp(void)
{
return SMBus_Read_Memory(SA, (RAM_ACCESS | RAM_TOBJ1)) * 0.02 - 273.15;
}
注:
1、nrf_drv_twi_tx 第五个参数是 是否不发送停止位

2、如果需要访问EEPROM中的地址,则实际的地址值是需要访问的地址值与 Opcode 的组合
如EEPROM的0x0E地址,实际中输入的应该是0x2E
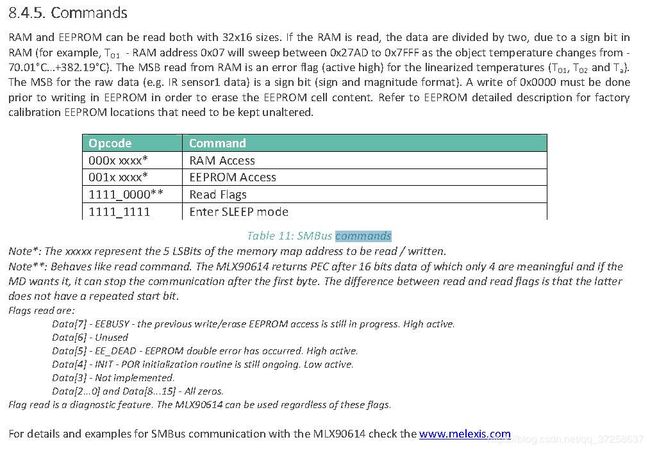
3、写的数据末尾一个字节要加上PEC

4、如果是写数据,先要把寄存器数据清零。比如命令为0x24,也就是修改发射频率,第一次先对高低八位分别写一遍0x00,第二次再重新用这个命令写入你要改的数据。
参考 2_Vibration_measurer-Github 项目