STM32位带操作
位带操作:
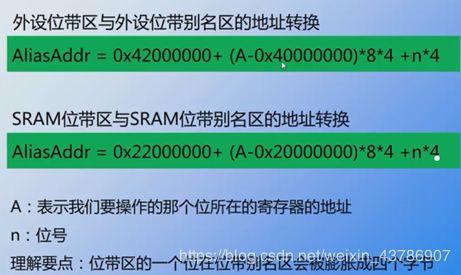
将一个位重新定义一个字的位带别名来操作
位带区一个位对应位带别名区的四个字节
针对stm32f10的代码实现:
头文件:
#ifndef __SYS_H_
#define __SYS_H_
#include
//IO口操作宏定义
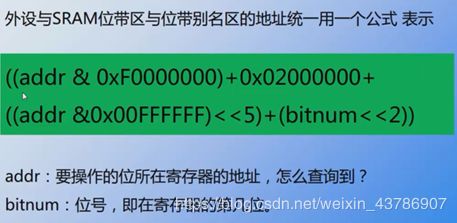
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+12) //0x4001080C
#define GPIOB_ODR_Addr (GPIOB_BASE+12) //0x40010C0C
#define GPIOC_ODR_Addr (GPIOC_BASE+12) //0x4001100C
#define GPIOD_ODR_Addr (GPIOD_BASE+12) //0x4001140C
#define GPIOE_ODR_Addr (GPIOE_BASE+12) //0x4001180C
#define GPIOF_ODR_Addr (GPIOF_BASE+12) //0x40011A0C
#define GPIOG_ODR_Addr (GPIOG_BASE+12) //0x40011E0C
#define GPIOA_IDR_Addr (GPIOA_BASE+8) //0x40010808
#define GPIOB_IDR_Addr (GPIOB_BASE+8) //0x40010C08
#define GPIOC_IDR_Addr (GPIOC_BASE+8) //0x40011008
#define GPIOD_IDR_Addr (GPIOD_BASE+8) //0x40011408
#define GPIOE_IDR_Addr (GPIOE_BASE+8) //0x40011808
#define GPIOF_IDR_Addr (GPIOF_BASE+8) //0x40011A08
#define GPIOG_IDR_Addr (GPIOG_BASE+8) //0x40011E08
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
/////////////////////////////////////////////////////////////////
//Ex_NVIC_Config专用定义
#define GPIO_A 0
#define GPIO_B 1
#define GPIO_C 2
#define GPIO_D 3
#define GPIO_E 4
#define GPIO_F 5
#define GPIO_G 6
#define FTIR 1 //下降沿触发
#define RTIR 2 //上升沿触发
/////////////////////////////////////////////////////////////////
//JTAG模式设置定义
#define JTAG_SWD_DISABLE 0X02
#define SWD_ENABLE 0X01
#define JTAG_SWD_ENABLE 0X00
/////////////////////////////////////////////////////////////////
#define u32 unsigned int
#define u8 unsigned char
//void BKP_Write(u8 reg,u16 dat); //写入后备寄存器
void Stm32_Clock_Init(u8 PLL); //时钟初始化
void Sys_Soft_Reset(void); //系统软复位
void Sys_Standby(void); //待机模式
void MY_NVIC_SetVectorTable(u32 NVIC_VectTab, u32 Offset);//设置偏移地址
void MY_NVIC_PriorityGroupConfig(u8 NVIC_Group);//设置NVIC分组
void MY_NVIC_Init(u8 NVIC_PreemptionPriority,u8 NVIC_SubPriority,u8 NVIC_Channel,u8 NVIC_Group);//设置中断
void Ex_NVIC_Config(u8 GPIOx,u8 BITx,u8 TRIM);//外部中断配置函数(只对GPIOA~G)
void JTAG_Set(u8 mode);
void SystemInit(void);//定义复位中断函数-空
void MYRCC_DeInit(void);
void Hex_Tran_Char_8bit(u8* hex_str,u8* char_str,u8 tran_num);
void Hex_Tran_Char_16bit(u16* hex_str,u8* char_str,u8 tran_num);
#endif
C文件:
#include "sys.h"
//////////////////////////////////////////////////////////////////////////////////
//V1.4修改说明
//把NVIC KO了,没有使用任何库文件!
//加入了JTAG_Set函数
//////////////////////////////////////////////////////////////////////////////////
//函数说明:十六进制转字符串函数 (8bit)
//参数:hex_str:要转换的十六进制数组
// char_str:转换后存放的字符数组
// tran_num:转换的个数
//返回值:无
void Hex_Tran_Char_8bit(u8* hex_str,u8* char_str,u8 tran_num)
{
u8 i,model[16]={'0','1','2','3','4','5','6','7','8','9','A','B','C','D','E','F'};
for(i=0;i>4)&0x0F];
char_str[2*i+1]=model[hex_str[i]&0x0F];
}
char_str[2*i]=0;//字符串结束符
}
//函数说明:十六进制转字符串函数(16bit)
//参数:hex_str:要转换的十六进制数组
// char_str:转换后存放的字符数组
// tran_num:转换的个数
//返回值:无
void Hex_Tran_Char_16bit(u16* hex_str,u8* char_str,u8 tran_num)
{
u8 i,model[16]={'0','1','2','3','4','5','6','7','8','9','A','B','C','D','E','F'};
for(i=0;i>12)&0x0F];
char_str[4*i+1]=model[(hex_str[i]>>8)&0x0F];
char_str[4*i+2]=model[(hex_str[i]>>4)&0x0F];
char_str[4*i+3]=model[hex_str[i]&0x0F];
}
char_str[4*i]=0;//字符串结束符
}
//函数说明:设置向量表偏移地址
//参数:NVIC_VectTab - 基址
// Offset - 偏移量
//返回值:无
void MY_NVIC_SetVectorTable(u32 NVIC_VectTab, u32 Offset)
{
//检查参数合法性
assert_param(IS_NVIC_VECTTAB(NVIC_VectTab));
assert_param(IS_NVIC_OFFSET(Offset));
SCB->VTOR = NVIC_VectTab|(Offset & (u32)0x1FFFFF80);//设置NVIC的向量表偏移寄存器
//用于标识向量表是在CODE区还是在RAM区
}
//函数说明:设置NVIC分组
//参数:NVIC_Group - NVIC分组 0~4 总共5组
//返回值:无
void MY_NVIC_PriorityGroupConfig(u8 NVIC_Group)
{
u32 temp,temp1;
temp1=(~NVIC_Group)&0x07;//取后三位
temp1<<=8;
temp=SCB->AIRCR; //读取先前的设置
temp&=0X0000F8FF; //清空先前分组
temp|=0X05FA0000; //写入钥匙
temp|=temp1;
SCB->AIRCR=temp; //设置分组
}
//函数说明:设置NVIC
//参数:NVIC_PreemptionPriority - 抢占优先级
// NVIC_SubPriority - 响应优先级
// NVIC_Channel - 中断编号
// NVIC_Group - 中断分组 0~4
// 注意优先级不能超过设定的组的范围!否则会死机
// 组划分:
// 组0:0位抢占优先级,4位响应优先级
// 组1:1位抢占优先级,3位响应优先级
// 组2:2位抢占优先级,2位响应优先级
// 组3:3位抢占优先级,1位响应优先级
// 组4:4位抢占优先级,0位响应优先级
// NVIC_SubPriority和NVIC_PreemptionPriority的原则是,数值越小,越优先
//返回值:无
void MY_NVIC_Init(u8 NVIC_PreemptionPriority,u8 NVIC_SubPriority,u8 NVIC_Channel,u8 NVIC_Group)
{
u32 temp;
u8 IPRADDR=NVIC_Channel/4; //每组只能存4个,得到组地址
u8 IPROFFSET=NVIC_Channel%4;//在组内的偏移
IPROFFSET=IPROFFSET*8+4; //得到偏移的确切位置
MY_NVIC_PriorityGroupConfig(NVIC_Group);//设置分组
temp=NVIC_PreemptionPriority<<(4-NVIC_Group);
temp|=NVIC_SubPriority&(0x0f>>NVIC_Group);
temp&=0xf;//取低四位
if(NVIC_Channel<32)NVIC->ISER[0]|=1<ISER[1]|=1<<(NVIC_Channel-32);
NVIC->IPR[IPRADDR]|=temp<APB2ENR|=0x01;//使能io复用时钟
AFIO->EXTICR[EXTADDR]&=~(0x000F<EXTICR[EXTADDR]|=GPIOx<IMR|=1<EMR|=1<FTSR|=1<RTSR|=1<APB1RSTR = 0x00000000;//复位结束
RCC->APB2RSTR = 0x00000000;
RCC->AHBENR = 0x00000014; //睡眠模式闪存和SRAM时钟使能.其他关闭.
RCC->APB2ENR = 0x00000000; //外设时钟关闭.
RCC->APB1ENR = 0x00000000;
RCC->CR |= 0x00000001; //使能内部高速时钟HSION
RCC->CFGR &= 0xF8FF0000; //复位SW[1:0],HPRE[3:0],PPRE1[2:0],PPRE2[2:0],ADCPRE[1:0],MCO[2:0]
RCC->CR &= 0xFEF6FFFF; //复位HSEON,CSSON,PLLON
RCC->CR &= 0xFFFBFFFF; //复位HSEBYP
RCC->CFGR &= 0xFF80FFFF; //复位PLLSRC, PLLXTPRE, PLLMUL[3:0] and USBPRE
RCC->CIR = 0x00000000; //关闭所有中断
//配置向量表
#ifdef VECT_TAB_RAM
MY_NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else
MY_NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
}
//函数说明:THUMB指令不支持汇编内联,实现执行汇编指令WFI
//参数:无
//返回值:无
__asm void WFI_SET(void)
{
WFI;
}
//函数说明:进入待机模式
//参数:无
//返回值:无
void Sys_Standby(void)
{
SCB->SCR|=1<<2;//使能SLEEPDEEP位 (SYS->CTRL)
RCC->APB1ENR|=1<<28; //使能电源时钟
PWR->CSR|=1<<8; //设置WKUP用于唤醒
PWR->CR|=1<<2; //清除Wake-up 标志
PWR->CR|=1<<1; //PDDS置位
WFI_SET(); //执行WFI指令
}
//后备寄存器写入操作
//reg:寄存器编号
//reg:要写入的数值
////check ok
////091202
//void BKP_Write(u8 reg,u16 dat)
//{
// RCC->APB1ENR|=1<<28; //使能电源时钟
// RCC->APB1ENR|=1<<27; //使能备份时钟
// PWR->CR|=1<<8; //取消备份区写保护
// switch(reg)
// {
// case 1:
// BKP->DR1=dat;
// break;
// case 2:
// BKP->DR2=dat;
// break;
// case 3:
// BKP->DR3=dat;
// break;
// case 4:
// BKP->DR4=dat;
// break;
// case 5:
// BKP->DR5=dat;
// break;
// case 6:
// BKP->DR6=dat;
// break;
// case 7:
// BKP->DR7=dat;
// break;
// case 8:
// BKP->DR8=dat;
// break;
// case 9:
// BKP->DR9=dat;
// break;
// case 10:
// BKP->DR10=dat;
// break;
// }
//}
//函数说明:系统软复位
//参数:无
//返回值:无
void Sys_Soft_Reset(void)
{
SCB->AIRCR =0X05FA0000|(u32)0x04;
}
//函数说明:JTAG模式设置,用于设置JTAG的模式
//参数:mode - jtag,swd模式设置;00,全使能;01,使能SWD;10,全关闭;
//返回值:无
void JTAG_Set(u8 mode)
{
u32 temp;
temp=mode;
temp<<=25;
RCC->APB2ENR|=1<<0; //开启辅助时钟
AFIO->MAPR&=0XF8FFFFFF; //清除MAPR的[26:24]
AFIO->MAPR|=temp; //设置jtag模式
}
//函数说明:系统时钟初始化函数
//参数: pll - 选择的倍频数,从2开始,最大值为16
//返回值:无
void Stm32_Clock_Init(u8 PLL)
{
unsigned char temp=0;
MYRCC_DeInit(); //复位并配置向量表
RCC->CR|=0x00010000; //外部高速时钟使能HSEON。 默认使用内部晶振,关闭外部晶振。
while(!(RCC->CR>>17));//等待外部时钟就绪
RCC->CFGR=0X00000400; //APB1=DIV2;APB2=DIV1;AHB=DIV1;
PLL-=2;//抵消2个单位
RCC->CFGR|=PLL<<18; //设置PLL值 2~16
RCC->CFGR|=1<<16; //PLLSRC ON
FLASH->ACR|=0x32; //FLASH 2个延时周期
RCC->CR|=0x01000000; //PLLON
while(!(RCC->CR>>25));//等待PLL锁定
RCC->CFGR|=0x00000002;//PLL作为系统时钟
while(temp!=0x02) //等待PLL作为系统时钟设置成功
{
temp=RCC->CFGR>>2;
temp&=0x03;
}
}