揭秘 Kubernetes attach/detach controller 逻辑漏洞致使 pod 启动失败
前言
本文主要通过深入学习k8s attach/detach controller源码,了解现网案例发现的attach/detach controller bug发生的原委,并给出解决方案。
看完本文你也将学习到:
- attach/detach controller的主要数据结构有哪些,保存什么数据,数据从哪来,到哪去等等;
- k8s attach/detach volume的详细流程,如何判断volume是否需要attach/detach,attach/detach controller和kubelet(volume manager)如何协同工作等等。
现网案例现象
我们首先了解下现网案例的问题和现象;然后去深入理解ad controller维护的数据结构;之后根据数据结构与ad controller的代码逻辑,再来详细分析现网案例出现的原因和解决方案。从而深入理解整个ad controller。
问题描述
- 一个statefulsets(sts)引用了多个pvc cbs,我们更新sts时,删除旧pod,创建新pod,此时如果删除旧pod时cbs detach失败,且创建的新pod调度到和旧pod相同的节点,就可能会让这些pod一直处于
ContainerCreating。
现象
kubectl describe pod
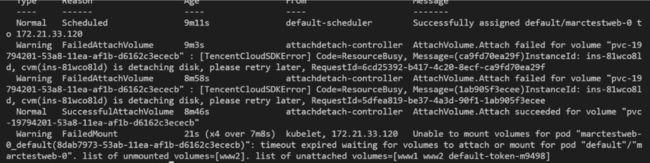
- kubelet log

kubectl get node xxx -oyaml的volumesAttached和volumesInUse
volumesAttached:
- devicePath: /dev/disk/by-id/virtio-disk-6w87j3wv
name: kubernetes.io/qcloud-cbs/disk-6w87j3wv
volumesInUse:
- kubernetes.io/qcloud-cbs/disk-6w87j3wv
- kubernetes.io/qcloud-cbs/disk-7bfqsft5k8s存储简述
k8s中attach/detach controller负责存储插件的attach/detach。本文结合现网出现的一个案例来分析ad controller的源码逻辑,该案例是因k8s的ad controller bug导致的pod创建失败。
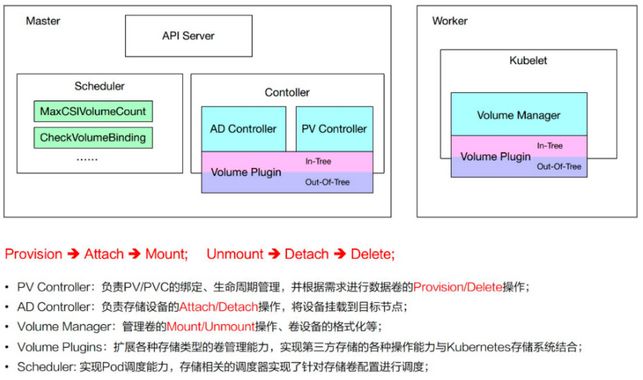
k8s中涉及存储的组件主要有:attach/detach controller、pv controller、volume manager、volume plugins、scheduler。每个组件分工明确:
- attach/detach controller:负责对volume进行attach/detach
- pv controller:负责处理pv/pvc对象,包括pv的provision/delete(cbs intree的provisioner设计成了external provisioner,独立的cbs-provisioner来负责cbs pv的provision/delete)
- volume manager:主要负责对volume进行mount/unmount
- volume plugins:包含k8s原生的和各厂商的的存储插件
- 原生的包括:emptydir、hostpath、flexvolume、csi等
- 各厂商的包括:aws-ebs、azure、我们的cbs等
- scheduler:涉及到volume的调度。比如对ebs、csi等的单node最大可attach磁盘数量的predicate策略
控制器模式是k8s非常重要的概念,一般一个controller会去管理一个或多个API对象,以让对象从实际状态/当前状态趋近于期望状态。
所以attach/detach controller的作用其实就是去attach期望被attach的volume,detach期望被detach的volume。
后续attach/detach controller简称ad controller。
ad controller数据结构
对于ad controller来说,理解了其内部的数据结构,再去理解逻辑就事半功倍。ad controller在内存中维护2个数据结构:
actualStateOfWorld—— 表征实际状态(后面简称asw)desiredStateOfWorld—— 表征期望状态(后面简称dsw)
很明显,对于声明式API来说,是需要随时比对实际状态和期望状态的,所以ad controller中就用了2个数据结构来分别表征实际状态和期望状态。
actualStateOfWorld
actualStateOfWorld 包含2个map:
attachedVolumes: 包含了那些ad controller认为被成功attach到nodes上的volumesnodesToUpdateStatusFor: 包含要更新node.Status.VolumesAttached的nodes
attachedVolumes
如何填充数据?
1、在启动ad controller时,会populate asw,此时会list集群内所有node对象,然后用这些node对象的node.Status.VolumesAttached 去填充attachedVolumes。
2、之后只要有需要attach的volume被成功attach了,就会调用MarkVolumeAsAttached(GenerateAttachVolumeFunc 中)来填充到attachedVolumes中。
如何删除数据?
1、只有在volume被detach成功后,才会把相关的volume从attachedVolumes中删掉。(GenerateDetachVolumeFunc 中调用MarkVolumeDetached)
nodesToUpdateStatusFor
如何填充数据?
1、detach volume失败后,将volume add back到nodesToUpdateStatusFor
- GenerateDetachVolumeFunc 中调用AddVolumeToReportAsAttached
如何删除数据?
1、在detach volume之前会先调用RemoveVolumeFromReportAsAttached 从nodesToUpdateStatusFor中先删除该volume相关信息
desiredStateOfWorld
desiredStateOfWorld 中维护了一个map:
nodesManaged:包含被ad controller管理的nodes,以及期望attach到这些node上的volumes。
nodesManaged
如何填充数据?
1、在启动ad controller时,会populate asw,list集群内所有node对象,然后把由ad controller管理的node填充到nodesManaged
2、ad controller的nodeInformer watch到node有更新也会把node填充到nodesManaged
3、另外在populate dsw和podInformer watch到pod有变化(add, update)时,往nodesManaged 中填充volume和pod的信息
4、desiredStateOfWorldPopulator 中也会周期性地去找出需要被add的pod,此时也会把相应的volume和pod填充到nodesManaged
如何删除数据?
1、当删除node时,ad controller中的nodeInformer watch到变化会从dsw的nodesManaged 中删除相应的node
2、当ad controller中的podInformer watch到pod的删除时,会从nodesManaged 中删除相应的volume和pod
3、desiredStateOfWorldPopulator 中也会周期性地去找出需要被删除的pod,此时也会从nodesManaged 中删除相应的volume和pod
ad controller流程简述
ad controller的逻辑比较简单:
1、首先,list集群内所有的node和pod,来populate actualStateOfWorld (attachedVolumes )和desiredStateOfWorld (nodesManaged)
2、然后,单独开个goroutine运行reconciler,通过触发attach, detach操作周期性地去reconcile asw(实际状态)和dws(期望状态)
- 触发attach,detach操作也就是,detach该被detach的volume,attach该被attach的volume
3、之后,又单独开个goroutine运行DesiredStateOfWorldPopulator ,定期去验证dsw中的pods是否依然存在,如果不存在就从dsw中删除
现网案例
接下来结合上面所说的现网案例,来详细看看reconciler的逻辑。
案例初步分析
- 从pod的事件可以看出来:ad controller认为cbs attach成功了,然后kubelet没有mount成功。
- 但是从kubelet日志却发现
Volume not attached according to node status,也就是说kubelet认为cbs没有按照node的状态去挂载。这个从node info也可以得到证实:volumesAttached中的确没有这个cbs盘(disk-7bfqsft5)。 - node info中还有个现象:
volumesInUse中还有这个cbs。说明没有unmount成功
很明显,cbs要能被pod成功使用,需要ad controller和volume manager的协同工作。所以这个问题的定位首先要明确:
- volume manager为什么认为volume没有按照node状态挂载,ad controller却认为volume attch成功了?
volumesAttached和volumesInUse在ad controller和kubelet之间充当什么角色?
这里只对分析volume manager做简要分析。
- 根据
Volume not attached according to node status在代码中找到对应的位置,发现在GenerateVerifyControllerAttachedVolumeFunc中。仔细看代码逻辑,会发现- volume manager的reconciler会先确认该被unmount的volume被unmount掉
- 然后确认该被mount的volume被mount
- 此时会先从volume manager的dsw缓存中获取要被mount的volumes(
volumesToMount的podsToMount) - 然后遍历,验证每个
volumeToMount是否已经attach了这个volumeToMount是由podManager中的podInformer加入到相应内存中,然后desiredStateOfWorldPopulator周期性同步到dsw中的
- 验证逻辑中,在
GenerateVerifyControllerAttachedVolumeFunc中会去遍历本节点的node.Status.VolumesAttached,如果没有找到就报错(Volume not attached according to node status)
- 此时会先从volume manager的dsw缓存中获取要被mount的volumes(
- 所以可以看出来,volume manager就是根据volume是否存在于
node.Status.VolumesAttached中来判断volume有无被attach成功。 - 那谁去填充
node.Status.VolumesAttached?ad controller的数据结构nodesToUpdateStatusFor就是用来存储要更新到node.Status.VolumesAttached上的数据的。 - 所以,如果ad controller那边没有更新
node.Status.VolumesAttached,而又新建了pod,desiredStateOfWorldPopulator从podManager中的内存把新建pod引用的volume同步到了volumesToMount中,在验证volume是否attach时,就会报错(Volume not attached according to node status)- 当然,之后由于kublet的syncLoop里面会调用
WaitForAttachAndMount去等待volumeattach和mount成功,由于前面一直无法成功,等待超时,才会有会面timeout expired的报错
- 当然,之后由于kublet的syncLoop里面会调用
所以接下来主要需要看为什么ad controller那边没有更新node.Status.VolumesAttached。
ad controller的reconciler详解
接下来详细分析下ad controller的逻辑,看看为什么会没有更新node.Status.VolumesAttached,但从事件看ad controller却又认为volume已经挂载成功。
从流程简述中表述可见,ad controller主要逻辑是在reconciler中。
reconciler定时去运行reconciliationLoopFunc,周期为100ms。reconciliationLoopFunc的主要逻辑在reconcile()中:首先,确保该被detach的volume被detach掉
- 遍历asw中的
attachedVolumes,对于每个volume,判断其是否存在于dsw中- 根据nodeName去dsw.nodesManaged中判断node是否存在
- 存在的话,再根据volumeName判断volume是否存在
- 如果volume存在于asw,且不存在于dsw,则意味着需要进行detach
- 之后,根据
node.Status.VolumesInUse来判断volume是否已经unmount完成,unmount完成或者等待6min timeout时间到后,会继续detach逻辑 - 在执行detach volume之前,会先调用
RemoveVolumeFromReportAsAttached从asw的nodesToUpdateStatusFor中去删除要detach的volume - 然后patch node,也就等于从
node.status.VolumesAttached删除这个volume - 之后进行detach,detach失败主要分2种
- 如果真正执行了
volumePlugin的具体实现DetachVolume失败,会把volume add back到nodesToUpdateStatusFor(之后在attach逻辑结束后,会再次patch node) - 如果是operator_excutor判断还没到backoff周期,就会返回
backoffError,直接跳过DetachVolume
- 如果真正执行了
- backoff周期起始为500ms,之后指数递增至2min2s。已经detach失败了的volume,在每个周期期间进入detach逻辑都会直接返回
backoffError
- 遍历asw中的
之后,确保该被attach的volume被attach成功
遍历dsw的
nodesManaged,判断volume是否已经被attach到该node,如果已经被attach到该node,则跳过attach操作去asw.attachedVolumes中判断是否存在,若不存在就认为没有attach到node
- 若存在,再判断node,node也匹配就返回
attachedConfirmed
- 若存在,再判断node,node也匹配就返回
- 而`attachedConfirmed`是由asw中`AddVolumeNode`去设置的,`MarkVolumeAsAttached`设置为true。(true即代表该volume已经被attach到该node了)
- 之后判断是否禁止多挂载,再由operator_excutor去执行attach
3. 最后,`UpdateNodeStatuses`去更新node status案例详细分析
- 前提
- volume detach失败
- sts+cbs(pvc),pod recreate前后调度到相同的node
- 涉及k8s组件
- ad controller
- kubelet(volume namager)
- ad controller和kubelet(volume namager)通过字段
node.status.VolumesAttached交互。- ad controller为
node.status.VolumesAttached新增或删除volume,新增表明已挂载,删除表明已删除 - kubelet(volume manager)需要验证新建pod中的(pvc的)volume是否挂载成功,存在于
node.status.VolumesAttached中,则表明验证volume已挂载成功;不存在,则表明还未挂载成功。
- ad controller为
- 以下是整个过程:
- 首先,删除pod时,由于某种原因cbs detach失败,失败后就会backoff重试。
- 由于detach失败,该volume也不会从asw的
attachedVolumes中删除
- 由于detach失败,该volume也不会从asw的
- 由于detach时,
- 先从
node.status.VolumesAttached中删除volume,之后才去执行detach - detach时返回
backoffError不会把该volumeadd backnode.status.VolumesAttached
- 先从
- 之后,我们在backoff周期中(假如就为第一个周期的500ms中间)再次创建sts,pod被调度到之前的node
- 而pod一旦被创建,就会被添加到dsw的
nodesManaged(nodeName和volumeName都没变) - reconcile()中的第2步,会去判断volume是否被attach,此时发现该volume同时存在于asw和dws中,并且由于detach失败,也会在检测时发现还是attach,从而设置
attachedConfirmed为true - ad controller就认为该volume被attach成功了
- reconcile()中第1步的detach逻辑进行判断时,发现要detach的volume已经存在于
dsw.nodesManaged了(由于nodeName和volumeName都没变),这样volume同时存在于asw和dsw中了,实际状态和期望状态一致,被认为就不需要进行detach了。 - 这样,该volume之后就再也不会被add back到
node.status.VolumesAttached。所以就出现了现象中的node info中没有该volume,而ad controller又认为该volume被attach成功了 - 由于kubelet(volume manager)与controller manager是异步的,而它们之间交互是依据
node.status.VolumesAttached,所以volume manager在验证volume是否attach成功,发现node.status.VolumesAttached中没有这个voume,也就认为没有attach成功,所以就有了现象中的报错Volume not attached according to node status - 之后kubelet的
syncPod在等待pod所有的volume attach和mount成功时,就超时了(现象中的另一个报错timeout expired wating...)。 - 所以pod一直处于
ContainerCreating
小结
- 所以,该案例出现的原因是:
- sts+cbs,pod recreate时间被调度到相同的node
- 由于detach失败,backoff期间创建sts/pod,致使ad controller中的dsw和asw数据一致(此时该volume由于没有被detach成功而确实处于attach状态),从而导致ad controller认为不再需要去detach该volume。
- 又由于detach时,是先从
node.status.VolumesAttached中删除该volume,再去执行真正的DetachVolume。backoff期间直接返回backoffError,跳过DetachVolume,不会add back - 之后,ad controller因volume已经处于attach状态,认为不再需要被attach,就不会再向
node.status.VolumesAttached中添加该volume - 最后,kubelet与ad controller交互就通过
node.status.VolumesAttached,所以kubelet认为没有attach成功,新创建的pod就一直处于ContianerCreating了
- 据此,我们可以发现关键点在于
node.status.VolumesAttached和以下两个逻辑:- detach时backoffError,不会add back
- detach是先删除,失败再add back
- 所以只要想办法能在任何情况下add back就不会有问题了。根据以上两个逻辑就对应有以下2种解决方案,推荐使用方案2:
- backoffError时,也add back
- pr #72914
- 但这种方式有个缺点:patch node的请求数增加了10+次/(s * volume)
- pr #72914
- 一进入detach逻辑就判断是否backoffError(处于backoff周期中),是就跳过之后所有detach逻辑,不删除就不需要add back了。
- pr #88572
- 这个方案能避免方案1的问题,且会进一步减少请求apiserver的次数,且改动也不多
- pr #88572
- backoffError时,也add back
总结
- AD Controller负责存储的Attach、Detach。通过比较asw和dsw来判断是否需要attach/detach。最终attach和detach结果会体现在
node.status.VolumesAttached。 - 以上现网案例出现的现象,是k8s ad controller的bug导致,目前社区并未修复。
- 现象出现的原因主要是:
- 先删除旧pod过程中detach失败,而在detach失败的backoff周期中创建新pod,此时由于ad controller逻辑bug,导致volume被从
node.status.VolumesAttached中删除,从而导致创建新pod时,kubelet检查时认为该volume没有attach成功,致使pod就一直处于ContianerCreating。
- 先删除旧pod过程中detach失败,而在detach失败的backoff周期中创建新pod,此时由于ad controller逻辑bug,导致volume被从
- 而现象的解决方案,推荐使用pr #88572。目前TKE已经有该方案的稳定运行版本,在灰度中。
- 现象出现的原因主要是: