Android 系统属性SystemProperty分析
Android System Property
属性变更的请求时init事件循环处理的另一个事件,在Android平台中,为了让运行中的所有进程共享系统运行时所需要的各种设置值,系统开辟了属性存储区域,并提供了访问该区域的API。属性由键(key)与值(value)构成,其表现形式为“键=值”。在Linux系统中,属性服务主要用来设置环境变量,提供各进程访问设定的环境变量值。在Android平台中,在访问属性值时,添加了访问权限控制,增强了访问的安全性。系统中所有运行中的进程都可以访问属性值,但仅有init进程才能修改属性值。其他进程修改属性值时,必须向init进程提出请求,最终由init进程负责修改属性值。在此过程中,init进程会先检查各属性的访问权限,而后再修改属性值,当属性值更改后,若定义在init.rc文件中的某个特定条件得到满足,则与此条件相匹配的动作就会发生,每个动作都有一个触发器,决定动作的执行时间,记录在“on property”关键字后的命令即被执行。
属性设计框架
属性系统是android的一个重要特性。它作为一个服务运行,管理系统配置和状态。每个属性是一个键值对(key/value pair),其类型都是字符串。属性被大量使用在Android系统中,用来记录系统设置或进程之间的信息交换。属性是在整个系统中全局可见的。每个进程可以get/set属性。
在系统初始化时,Android将分配一个共享内存区来存储的属性。这些是由“init”守护进程完成的,其源代码位于:device/system/init。“init”守护进程将启动一个属性服务。属性服务在“init”守护进程中运行。每一个客户端想要设置属性时,必须连接属性服务,再向其发送信息。属性服务将会在共享内存区中修改和创建属性。任何客户端想获得属性信息,可以从共享内存直接读取。这提高了读取性能。
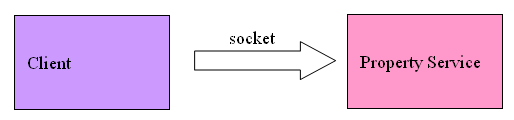
属性系统的上层架构如下图所示
图中有3个进程、一组永久属性文件和一块共享内存区域。共享内存区域是所有属性记录的存储所在。只有property服务进程才可以写入共享内存区域,它负责从永久文件中加载属性记录并将它们保存在共享内存中。
consumer进程将共享内存加载到其自身的虚拟地址空间并直接访问这些属性。setter进程同样将共享内存加载到其自身的虚拟地址空间,但其不能直接写该内存。当setter试图增加或者更新一个属性时,它将该属性通过unix domain socket发送至property服务。property服务代表setter进程将该属性写入共享内存和永久文件中。
property服务运行于init进程中。init进程首先创建一个共享内存区域,并保存一个指向该区域的描述符fd。init进程将该区域通过使用了MAP_SHARED标志的mmap映射至它自身的虚拟地址空间,这样,任何对于该区域的更新对于所有进程都是可见的。fd和区域大小被存储在一个名为ANDROID_PROPERTY_WORKSPACE的变量中。任何其他进程,比如consumer和setter将使用这个变量来获得fd和尺寸,这样它们就能mmap这个区域到它们自身的虚拟地址空间中。该共享内存区域如下图所示。
当启动属性服务时,将从以下文件中加载默认属性:
/ default.prop
/system/build.prop
/system/default.prop
/data/local.prop
属性将会以上述顺序加载。后加载的属性将覆盖原先的值。
启动property服务。在这一步中,一个unix domain socket服务被创建。此socket的路径是/dev/socket/property_service,该路径对于其他客户端进程是熟知的。最后,init进程调用poll来等待该socket上的连接事件。在consumer一边,当它初始化libc(bionic/libc/bionic/libc_common.c __libc_init_common函数),它将从环境变量中返回fd和尺寸,并映射共享内存到其自身的地址空间(bionic/libc/bionic/system_properties.c __system_properties_init函数)。在这之后,libcutils可以想读取普通内存那样为consumer读取属性。目前,属性是不能够被删除的。也就是说,一旦添加了一个属性,它将不能够被删除,其键也不能够被改变。
几种特殊的属性:
1.ro.属性,它表示只读属性,它一旦被设置就不能被修改;
2.net.属性,顾名思义,就是与网络相关的属性,net.属性中有一个特殊的属性:net.change,它记录了每一次最新设置和更新的net.属性,也就是每次设置和更新net.属性时则会自动的更新net.change属性,net.change属性的value就是这个被设置或者更新的net属性的name。例如我们更新了属性net.bt.name的值,由于net有属性发生了变化,那么属性服务就会自动更新net.change,将其值设置为net.bt.name。
3.persist.属性,以文件的形式保存在/data/property路径下。persist.属性由于将其保存在了用户空间中,所以在property_init中是不能对其更新的,只能将其更新过程交给用户来处理。
4.ctl.属性,虽然是以属性的形式来进行设置,其实它的目的是为了启动或关闭它指定的service
属性“ ctrl.start ”和“ ctrl.stop ”是用来启动和停止服务。每一项服务必须在/init.rc中定义.系统启动时,init守护进程将解析init.rc和启动属性服务。一旦收到设置“ ctrl.start ”属性的请求,属性服务将使用该属性值作为服务名找到该服务,启动该服务。这项服务的启动结果将会放入“ init.svc.<服务名>“属性中 。客户端应用程序可以轮询那个属性值,以确定结果。
如何读取/设置属性
1、native code
当编写本地应用程序时,可以使用property_get和property_set这两个API来读取/设置属性。要使用它们,我们需要include cutils/properties.h,并链接libcutils库。
int property_get(const char *key, char *value, const char *default_value);
int property_set(const char *key, const char *value);
默认情况下,设置属性只会使"init"守护程序写入共享内存,它不会执行任何脚本或二进制程序。但是,您可以将您的想要的实现的操作与init.rc中某个属性的变化相关联.例如,在默认的init.rc中有:
# adbd on at boot in emulatoron property:ro.kernel.qemu=1
start adbd
on property:persist.service.adb.enable=1
start adbd
on property:persist.service.adb.enable=0
stop adbd
这样,如果你设置persist.service.adb.enable为1 ,"init"守护程序就知道需要采取行动:开启adbd服务。
2、java code
在Java包中提供有System.getProperty和System.setProperty方法。但值得注意的是,尽管这两个API在语义上等同native函数,但其将数据存储于完全不同的位置。实际上,dalvik VM使用一个哈希表来存储这些属性。所以,用这两个API存储的属性是独立的,不能存取native属性,反之亦然。
然而Android有一个内部隐藏类(@hide,对SDK不可见)android.os.SystemProperties来操纵native属性。其通过jni来存取native属性库。
3、shell脚本
Android toolbox程序提供了两个工具: setprop和getprop获取和设置属性。其使用方法:
getprop <属性名>
setprop <属性名><<属性值>
可以通过命令adb shell :
getprop查看手机上所有属性状态值。
或者 getprop init.svc.bootanim制定查看某个属性状态
使用setprop init.svc.bootanim start 设置某个属性的状态
property_service.c:
1)PA_COUNT_MAX指定了系统(共享内存区域中)最多能存储多少个属性。
2)PROP_NAME_MAX指定了一个属性的key最大允许长度;
3)PROP_VALUE_MAX则指定了value的最大允许长度。
属性服务启动过程
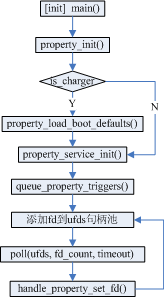
int main(int argc, char **argv)
{
.............
//初始化属性的存储空间
property_init();
.............
is_charger = !strcmp(bootmode, "charger");
//如果是充电模式,则加载/default.prop属性文件
INFO("property init\n");
if (!is_charger)
property_load_boot_defaults();
//属性初始化
queue_builtin_action(property_service_init_action, "property_service_init");
/* run all property triggers based on current state of the properties */
queue_builtin_action(queue_property_triggers_action, "queue_property_triggers");
for(;;) {
int nr, i, timeout = -1;
execute_one_command();
restart_processes();
if (!property_set_fd_init && get_property_set_fd() > 0) {
ufds[fd_count].fd = get_property_set_fd();
ufds[fd_count].events = POLLIN;
ufds[fd_count].revents = 0;
fd_count++;
property_set_fd_init = 1;
}
.................
//轮训等待
nr = poll(ufds, fd_count, timeout);
if (nr <= 0)
continue;
for (i = 0; i < fd_count; i++) {
if (ufds[i].revents == POLLIN) {
//处理属性事件
if (ufds[i].fd == get_property_set_fd())
handle_property_set_fd();
.............
}
}
}
return 0;
}Android 属性系统的整个流程:
1)初始化属性存储空间
property_init()函数用来初始化属性域,首先在内存中开辟一块共享区域,而后将其用着匿名共享内存,外部进程可以访问这块共享内存域,获取属性值,但它们不能通过直接访问共享内存域的方式来更改属性值。一个进程若想更改属性值,必须先向init进程提交属性变更请求,由init进程更改共享内存中的属性值。
void property_init(void)
{
init_property_area(); //初始化属性存储区域
}
static int init_property_area(void)
{
prop_area *pa;
if(pa_info_array)
return -1;
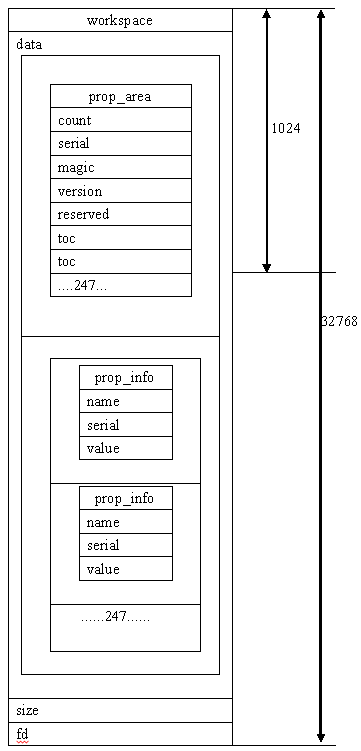
//初始化工作空间,大小为32768
if(init_workspace(&pa_workspace, PA_SIZE))
return -1;
//设置工作空间句柄属性值
fcntl(pa_workspace.fd, F_SETFD, FD_CLOEXEC);
//设置pa_info_array的值为属性工作空间的数据区地址加偏移1024
pa_info_array = (void*) (((char*) pa_workspace.data) + PA_INFO_START);
//设置属性区域为工作空间的数据区
pa = pa_workspace.data;
//设置属性区域的值为0
memset(pa, 0, PA_SIZE);
//设置属性的幻数
pa->magic = PROP_AREA_MAGIC;
//设置属性的版本
pa->version = PROP_AREA_VERSION;
//将全局变量__system_property_area__指向属性空间
__system_property_area__ = pa;
property_area_inited = 1;
return 0;
}static int init_workspace(workspace *w, size_t size)
{
void *data;
int fd;
/* dev is a tmpfs that we can use to carve a shared workspace
* out of, so let's do that...
*/
//打开"/dev/__properties__"设备文件
fd = open("/dev/__properties__", O_RDWR | O_CREAT, 0600);
if (fd < 0)
return -1;
//设置"/dev/__properties__"设备文件大小
if (ftruncate(fd, size) < 0)
goto out;
//将设备文件映射到共享内存空间
data = mmap(NULL, size, PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
if(data == MAP_FAILED)
goto out;
close(fd);
fd = open("/dev/__properties__", O_RDONLY);
if (fd < 0)
return -1;
//删除"/dev/__properties__"设备文件
unlink("/dev/__properties__");
w->data = data;
w->size = size;
w->fd = fd;
return 0;
out:
close(fd);
return -1;
}属性系统的存储空间分配图如下:
2)初始化系统属性
queue_builtin_action(property_service_init_action, "property_service_init");
static int property_service_init_action(int nargs, char **args)
{
//必须在ro.foo属性被设置后,读取属性文件并启动属性服务
start_property_service();
return 0;
}void start_property_service(void)
{
int fd;
//加载"/system/build.prop"属性文件
load_properties_from_file(PROP_PATH_SYSTEM_BUILD);
//加载"/system/default.prop"属性文件
load_properties_from_file(PROP_PATH_SYSTEM_DEFAULT);
#ifdef ALLOW_LOCAL_PROP_OVERRIDE
//加载 "/data/local.prop"属性文件
load_properties_from_file(PROP_PATH_LOCAL_OVERRIDE);
#endif
/* 读取持久属性 */
load_persistent_properties();
//创建名为"property_service"的socket
fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM, 0666, 0, 0);
if(fd < 0) return;
//设置socket的句柄属性
fcntl(fd, F_SETFD, FD_CLOEXEC);
fcntl(fd, F_SETFL, O_NONBLOCK);
//启动socket监听
listen(fd, 8);
//设置property_set_fd为监听socket的句柄值
property_set_fd = fd;
}static void load_properties_from_file(const char *fn)
{
char *data;
unsigned sz;
//读取文件,返回文件内容
data = read_file(fn, &sz);
if(data != 0) {
//解析文件内容,并设置相应属性
load_properties(data);
free(data);
}
}ro.com.android.dataroaming=false
persist.msms.phone_count=2
persist.blcr.enable=0
persist.msms.phone_default=0
dalvik.vm.heapstartsize=5m
dalvik.vm.heapgrowthlimit=64mstatic void load_properties(char *data)
{
char *key, *value, *eol, *sol, *tmp;
sol = data;
//解析属性内容,
while((eol = strchr(sol, '\n'))) {
key = sol;
*eol++ = 0;
sol = eol;
value = strchr(key, '=');
if(value == 0) continue;
*value++ = 0;
while(isspace(*key)) key++;
if(*key == '#') continue;
tmp = value - 2;
while((tmp > key) && isspace(*tmp)) *tmp-- = 0;
while(isspace(*value)) value++;
tmp = eol - 2;
while((tmp > value) && isspace(*tmp)) *tmp-- = 0;
//属性设置
property_set(key, value);
}
}3)属性服务端设置属性
Init进程通过poll系统调用来监控ufds句柄池中的事件,当某一进程需要设置某一属性时,将通过socket向Init进程发起请求,请求过程在接下来分析,当Init接收到请求时,poll系统调用返回,并根据传过来的系统属性及属性值设置相应的属性,设置过程如下:
void handle_property_set_fd()
{
prop_msg msg;
int s;
int r;
int res;
struct ucred cr;
struct sockaddr_un addr;
socklen_t addr_size = sizeof(addr);
socklen_t cr_size = sizeof(cr);
//接收客户端的socket连接
if ((s = accept(property_set_fd, (struct sockaddr *) &addr, &addr_size)) < 0) {
return;
}
/* 检查socket权限属性 */
if (getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0) {
close(s);
ERROR("Unable to recieve socket options\n");
return;
}
//从socket中接收来之客户端的消息
r = TEMP_FAILURE_RETRY(recv(s, &msg, sizeof(msg), 0));
if(r != sizeof(prop_msg)) {
ERROR("sys_prop: mis-match msg size recieved: %d expected: %d errno: %d\n",r, sizeof(prop_msg), errno);
close(s);
return;
}
//根据消息命令码区分消息
switch(msg.cmd) {
//设置属性
case PROP_MSG_SETPROP:
msg.name[PROP_NAME_MAX-1] = 0;
msg.value[PROP_VALUE_MAX-1] = 0;
//判断消息名称是否以"ctl."开头
if(memcmp(msg.name,"ctl.",4) == 0) {
//关闭socket
close(s);
//根据msg.value查找对应的service,并检查启动权限
if (check_control_perms(msg.value, cr.uid, cr.gid)) {
//控制对应服务的运行状态
handle_control_message((char*) msg.name + 4, (char*) msg.value);
} else {
ERROR("sys_prop: Unable to %s service ctl [%s] uid:%d gid:%d pid:%d\n",
msg.name + 4, msg.value, cr.uid, cr.gid, cr.pid);
}
} else {
//检查判断属性的权限
if (check_perms(msg.name, cr.uid, cr.gid)) {
//设置属性
property_set((char*) msg.name, (char*) msg.value);
} else {
ERROR("sys_prop: permission denied uid:%d name:%s\n",cr.uid, msg.name);
}
//关闭socket
close(s);
}
break;
default:
//关闭socket
close(s);
break;
}
}1.服务状态控制属性设置
以ctl开头的属性是服务运行状态控制属性,对于这类属性,根据ctl后面的start或stop来控制服务进程的启动与停止,在启动或停止服务进程前首先会检查control_perms数组中的服务是否具有相应权限:
static int check_control_perms(const char *name, unsigned int uid, unsigned int gid) {
int i;
//system /root用户直接有权限
if (uid == AID_SYSTEM || uid == AID_ROOT)
return 1;
//查询用户名单,判断是否存在表中并具有对应权限
for (i = 0; control_perms[i].service; i++) {
if (strcmp(control_perms[i].service, name) == 0) {
if ((uid && control_perms[i].uid == uid) ||
(gid && control_perms[i].gid == gid)) {
return 1;
}
}
}
return 0;
}需要指定权限的服务存放在数组control_perms中:
control_perms[] = {
{ "dumpstate",AID_SHELL, AID_LOG },
{ "ril-daemon",AID_RADIO, AID_RADIO },
{NULL, 0, 0 }
};如果想要应用有权限启动/关闭某Native Service:需要具有system/root权限
比如要停止zygote进程,可以使用property_set("ctl.stop", "zygote")来实现,进程运行状态是通过handle_control_message来控制的:
void handle_control_message(const char *msg, const char *arg)
{
if (!strcmp(msg,"start")) {
msg_start(arg);
} else if (!strcmp(msg,"stop")) {
msg_stop(arg);
} else if (!strcmp(msg,"restart")) {
msg_stop(arg);
msg_start(arg);
} else {
ERROR("unknown control msg '%s'\n", msg);
}
}
static void msg_start(const char *name)
{
struct service *svc;
char *tmp = NULL;
char *args = NULL;
//是否包含':'
if (!strchr(name, ':'))
//根据服务名查找服务
svc = service_find_by_name(name);
else {
tmp = strdup(name);
args = strchr(tmp, ':');
*args = '\0';
args++;
svc = service_find_by_name(tmp);
}
if (svc) {
//启动服务
service_start(svc, args);
} else {
ERROR("no such service '%s'\n", name);
}
if (tmp)
free(tmp);
}
void service_start(struct service *svc, const char *dynamic_args)
{
struct stat s;
pid_t pid;
int needs_console;
int n;
/* starting a service removes it from the disabled or reset
* state and immediately takes it out of the restarting
* state if it was in there
*/
svc->flags &= (~(SVC_DISABLED|SVC_RESTARTING|SVC_RESET));
svc->time_started = 0;
/* running processes require no additional work -- if
* they're in the process of exiting, we've ensured
* that they will immediately restart on exit, unless
* they are ONESHOT
*/
if (svc->flags & SVC_RUNNING) {
return;
}
needs_console = (svc->flags & SVC_CONSOLE) ? 1 : 0;
if (needs_console && (!have_console)) {
ERROR("service '%s' requires console\n", svc->name);
svc->flags |= SVC_DISABLED;
return;
}
if (stat(svc->args[0], &s) != 0) {
ERROR("cannot find '%s', disabling '%s'\n", svc->args[0], svc->name);
svc->flags |= SVC_DISABLED;
return;
}
if ((!(svc->flags & SVC_ONESHOT)) && dynamic_args) {
ERROR("service '%s' must be one-shot to use dynamic args, disabling\n",
svc->args[0]);
svc->flags |= SVC_DISABLED;
return;
}
NOTICE("starting '%s'\n", svc->name);
//fork出新的进程
pid = fork();
//新进程执行服务内容
if (pid == 0) {
struct socketinfo *si;
struct svcenvinfo *ei;
char tmp[32];
int fd, sz;
umask(077);
//判断属性系统是否初始化
if (properties_inited()) {
//获取属性空间的句柄和大小
get_property_workspace(&fd, &sz);
//将属性空间的句柄和大小格式化成字符串并添加到环境变量ANDROID_PROPERTY_WORKSPACE
sprintf(tmp, "%d,%d", dup(fd), sz);
add_environment("ANDROID_PROPERTY_WORKSPACE", tmp);
}
//添加其他环境变量
for (ei = svc->envvars; ei; ei = ei->next)
add_environment(ei->name, ei->value);
//如果服务支持socket通信,创建socket
for (si = svc->sockets; si; si = si->next) {
int socket_type = (!strcmp(si->type, "stream") ? SOCK_STREAM :(!strcmp(si->type, "dgram") ? SOCK_DGRAM : SOCK_SEQPACKET));
//创建socket
int s = create_socket(si->name, socket_type,si->perm, si->uid, si->gid);
//将创建的socket句柄以名为ANDROID_SOCKET_xxx添加到环境变量中
if (s >= 0) {
publish_socket(si->name, s);
}
}
if (svc->ioprio_class != IoSchedClass_NONE) {
if (android_set_ioprio(getpid(), svc->ioprio_class, svc->ioprio_pri)) {
ERROR("Failed to set pid %d ioprio = %d,%d: %s\n",getpid(), svc->ioprio_class, svc->ioprio_pri, strerror(errno));
}
}
//如果需要控制台,打开控制台
if (needs_console) {
setsid();
open_console();
} else {
zap_stdio();
}
setpgid(0, getpid());
/* as requested, set our gid, supplemental gids, and uid */
if (svc->gid) {
if (setgid(svc->gid) != 0) {
ERROR("setgid failed: %s\n", strerror(errno));
_exit(127);
}
}
if (svc->nr_supp_gids) {
if (setgroups(svc->nr_supp_gids, svc->supp_gids) != 0) {
ERROR("setgroups failed: %s\n", strerror(errno));
_exit(127);
}
}
if (svc->uid) {
if (setuid(svc->uid) != 0) {
ERROR("setuid failed: %s\n", strerror(errno));
_exit(127);
}
}
//调用exec函数启动新的程序
if (!dynamic_args) {
if (execve(svc->args[0], (char**) svc->args, (char**) ENV) < 0) {
ERROR("cannot execve('%s'): %s\n", svc->args[0], strerror(errno));
}
} else {
char *arg_ptrs[INIT_PARSER_MAXARGS+1];
int arg_idx = svc->nargs;
char *tmp = strdup(dynamic_args);
char *next = tmp;
char *bword;
/* Copy the static arguments */
memcpy(arg_ptrs, svc->args, (svc->nargs * sizeof(char *)));
while((bword = strsep(&next, " "))) {
arg_ptrs[arg_idx++] = bword;
if (arg_idx == INIT_PARSER_MAXARGS)
break;
}
arg_ptrs[arg_idx] = '\0';
execve(svc->args[0], (char**) arg_ptrs, (char**) ENV);
}
_exit(127);
}
if (pid < 0) {
ERROR("failed to start '%s'\n", svc->name);
svc->pid = 0;
return;
}
//设置服务进程状态
svc->time_started = gettime();
svc->pid = pid;
svc->flags |= SVC_RUNNING;
//如果属性初始化了,更新服务的运行状态属性
if (properties_inited())
notify_service_state(svc->name, "running");
}
void notify_service_state(const char *name, const char *state)
{
char pname[PROP_NAME_MAX];
int len = strlen(name);
if ((len + 10) > PROP_NAME_MAX)
return;
//格式化服务对应属性名称
snprintf(pname, sizeof(pname), "init.svc.%s", name);
//设置对应服务的运行状态
property_set(pname, state);
}2.系统属性设置
在设置系统属性前,依然要检查property_perms属性数组中的属性是否有指定的权限static int check_perms(const char *name, unsigned int uid, unsigned int gid)
{
int i;
if (uid == 0)
return 1;
if(!strncmp(name, "ro.", 3))
name +=3;
//遍历property_perms数组,判断该数组内的属性是否拥有相应的权限
for (i = 0; property_perms[i].prefix; i++) {
int tmp;
if (strncmp(property_perms[i].prefix, name,strlen(property_perms[i].prefix)) == 0) {
if ((uid && property_perms[i].uid == uid) ||
(gid && property_perms[i].gid == gid)) {
return 1;
}
}
}
return 0;
}
property_perms[] = {
{ "net.rmnet0.", AID_RADIO, 0 },
{ "net.gprs.", AID_RADIO, 0 },
{ "net.ppp", AID_RADIO, 0 },
{ "net.qmi", AID_RADIO, 0 },
{ "net.lte", AID_RADIO, 0 },
{ "net.cdma", AID_RADIO, 0 },
{ "ril.", AID_RADIO, 0 },
{ "gsm.", AID_RADIO, 0 },
{ "persist.radio", AID_RADIO, 0 },
{ "persist.msms", AID_RADIO, 0 },
{ "net.dns", AID_RADIO, 0 },
{ "sys.usb.config", AID_RADIO, 0 },
{ "net.", AID_SYSTEM, 0 },
{ "dev.", AID_SYSTEM, 0 },
{ "runtime.", AID_SYSTEM, 0 },
{ "hw.", AID_SYSTEM, 0 },
{ "sys.", AID_SYSTEM, 0 },
{ "service.", AID_SYSTEM, 0 },
{ "wlan.", AID_SYSTEM, 0 },
{ "dhcp.", AID_SYSTEM, 0 },
{ "dhcp.", AID_DHCP, 0 },
{ "debug.", AID_SYSTEM, 0 },
{ "debug.", AID_SHELL, 0 },
{ "log.", AID_SHELL, 0 },
{ "service.adb.root", AID_SHELL, 0 },
{ "service.adb.tcp.port", AID_SHELL, 0 },
{ "persist.sys.", AID_SYSTEM, 0 },
{ "persist.service.", AID_SYSTEM, 0 },
{ "persist.security.", AID_SYSTEM, 0 },
#ifdef BOARD_HAVE_BLUETOOTH_BCM
{ "service.brcm.bt.", AID_BLUETOOTH, 0 },
{ "service.brcm.bt.", AID_SYSTEM, 0 },
{ "persist.service.brcm.bt.", AID_BLUETOOTH, 0 },
{ "persist.service.brcm.bt.", AID_SYSTEM, 0 },
{ "brcm.fm_state", AID_SYSTEM, 0 },
{ "brcm.fm_state", AID_BLUETOOTH, 0 },
{ "brcm.bt_state", AID_SYSTEM, 0 },
{ "brcm.bt_state", AID_BLUETOOTH, 0 },
#endif
{ NULL, 0, 0 }
};
int property_set(const char *name, const char *value)
{
prop_area *pa;
prop_info *pi;
int namelen = strlen(name);
int valuelen = strlen(value);
//属性名和属性值长度检查
if(namelen >= PROP_NAME_MAX) return -1;
if(valuelen >= PROP_VALUE_MAX) return -1;
if(namelen < 1) return -1;
//根据名称从属性系统中查找对应的属性信息
pi = (prop_info*) __system_property_find(name);
//如果该属性已存在,则更新该属性
if(pi != 0) {
/* ro.* properties may NEVER be modified once set */
if(!strncmp(name, "ro.", 3)) return -1;
pa = __system_property_area__;
update_prop_info(pi, value, valuelen);
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
//插入新的属性
} else {
pa = __system_property_area__;
if(pa->count == PA_COUNT_MAX) return -1;
pi = pa_info_array + pa->count;
pi->serial = (valuelen << 24);
memcpy(pi->name, name, namelen + 1);
memcpy(pi->value, value, valuelen + 1);
pa->toc[pa->count] =(namelen << 24) | (((unsigned) pi) - ((unsigned) pa));
pa->count++;
pa->serial++;
__futex_wake(&pa->serial, INT32_MAX);
}
/* 以.net开头的属性是DNS属性 */
if (strncmp("net.", name, strlen("net.")) == 0) {
if (strcmp("net.change", name) == 0) {
return 0;
}
/*
* The 'net.change' property is a special property used track when any
* 'net.*' property name is updated. It is _ONLY_ updated here. Its value
* contains the last updated 'net.*' property.
*/
property_set("net.change", name);
/*对于持久性属性*/
} else if (persistent_properties_loaded && strncmp("persist.", name, strlen("persist.")) == 0) {
/*
* Don't write properties to disk until after we have read all default properties
* to prevent them from being overwritten by default values.
*/
write_persistent_property(name, value);
}
//执行属性更改触发的动作
property_changed(name, value);
return 0;
}property_set()函数,更改属性值,并调用property_changed()函数处理在init.rc文件中记录着的某个属性改变后要采取的动作,动作执行条件以“on property:
void property_changed(const char *name, const char *value)
{
if (property_triggers_enabled)
queue_property_triggers(name, value);
}# adbd on at boot in emulator
on property:ro.kernel.qemu=1
start adbd
当属性ro.kernel.qemu=1时,启动adb服务,queue_property_triggers()函数处理属性触发的动作:
void queue_property_triggers(const char *name, const char *value)
{
struct listnode *node;
struct action *act;
list_for_each(node, &action_list) {
act = node_to_item(node, struct action, alist);
if (!strncmp(act->name, "property:", strlen("property:"))) {
const char *test = act->name + strlen("property:");
int name_length = strlen(name);
if (!strncmp(name, test, name_length) &&
test[name_length] == '=' &&
(!strcmp(test + name_length + 1, value) ||
!strcmp(test + name_length + 1, "*"))) {
action_add_queue_tail(act);
}
}
}
}客户进程初始化属性匿名共享内存
共享内存空间fd size作为环境变量传递给新创建进程,将系统属性内存空间映射到当前进程虚拟空间:进程在启动时,会加载动态库bionic libc库:
\bionic\libc\bionic\libc_init_dynamic.c中:
void __libc_preinit(void)
{
__libc_init_common(elfdata);
}
void __libc_init_common(uintptr_t *elfdata)
{
__system_properties_init();
}
int __system_properties_init(void)
{
prop_area *pa; int s, fd; unsigned sz; char *env;
//获取环境变量ANDROID_PROPERTY_WORKSPACE
//与上面init进程中设置对应
env = getenv("ANDROID_PROPERTY_WORKSPACE");
//共享内存文件描述符 内存大小
fd = atoi(env);
sz = atoi(env + 1);
//将文件描述符映射到当前进程虚拟空间内存,实现共享内存
pa = mmap(0, sz, PROT_READ, MAP_SHARED, fd, 0);
//全局变量指向共享系统属性内存首地址
__system_property_area__ = pa;
}客户进程读取或设置属性
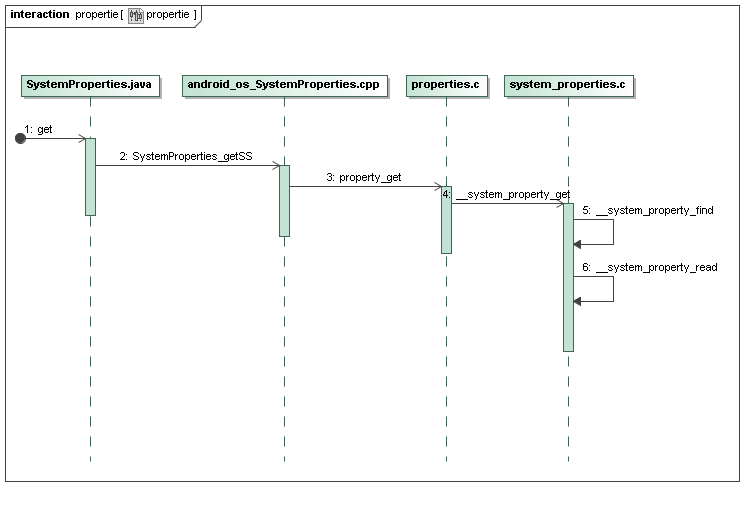
framework通过SystemProperties接口操作系统属性,SystemProperties通过JNI调用访问系统属性。
\frameworks\base\core\java\android\os\ SystemProperties.java:
public class SystemProperties
{
//JNI
private static native String native_get(String key, String def);
private static native void native_set(String key, String def);
public static String get(String key, String def) {
return native_get(key, def);
}
public static void set(String key, String val) {
native_set(key, val);
}
}获取系统属性
static jstring SystemProperties_getS(JNIEnv *env, jobject clazz,
jstring keyJ)
{
return SystemProperties_getSS(env, clazz, keyJ, NULL);
}static jstring SystemProperties_getSS(JNIEnv *env, jobject clazz,
jstring keyJ, jstring defJ)
{
int len;
const char* key;
char buf[PROPERTY_VALUE_MAX];
jstring rvJ = NULL;
if (keyJ == NULL) {
jniThrowNullPointerException(env, "key must not be null.");
goto error;
}
key = env->GetStringUTFChars(keyJ, NULL);
len = property_get(key, buf, "");//读取属性,默认值为“”
if ((len <= 0) && (defJ != NULL)) {
rvJ = defJ;
} else if (len >= 0) {
rvJ = env->NewStringUTF(buf);
} else {
rvJ = env->NewStringUTF("");
}
env->ReleaseStringUTFChars(keyJ, key);
error:
return rvJ;
}int property_get(const char *key, char *value, const char *default_value)
{
int len;
len = __system_property_get(key, value);//获取属性值
if(len > 0) {
return len;
}
if(default_value) { //如果读取到的属性值的长度为0,则使用默认值
len = strlen(default_value);
memcpy(value, default_value, len + 1);
}
return len;
}
int __system_property_get(const char *name, char *value)
{
const prop_info *pi = __system_property_find(name);//根据属性名称从属性共享内存中查找属性信息
if(pi != 0) {
return __system_property_read(pi, 0, value);//读取属性值
} else {
value[0] = 0;
return 0;
}
}const prop_info *__system_property_find(const char *name)
{
prop_area *pa = __system_property_area__;//数据已经存储在内存中__system_property_area__
unsigned count = pa->count;
unsigned *toc = pa->toc;
unsigned len = strlen(name);
prop_info *pi;
while(count--) {//遍历属性条目
unsigned entry = *toc++;
if(TOC_NAME_LEN(entry) != len) continue;
pi = TOC_TO_INFO(pa, entry);
if(memcmp(name, pi->name, len)) continue;
return pi;
}
return 0;
}int __system_property_read(const prop_info *pi, char *name, char *value)
{
unsigned serial, len;
for(;;) {
serial = pi->serial;
while(SERIAL_DIRTY(serial)) {
__futex_wait((volatile void *)&pi->serial, serial, 0);
serial = pi->serial;
}
len = SERIAL_VALUE_LEN(serial);
memcpy(value, pi->value, len + 1);
if(serial == pi->serial) {
if(name != 0) {
strcpy(name, pi->name);
}
return len;
}
}
}
设置系统属性
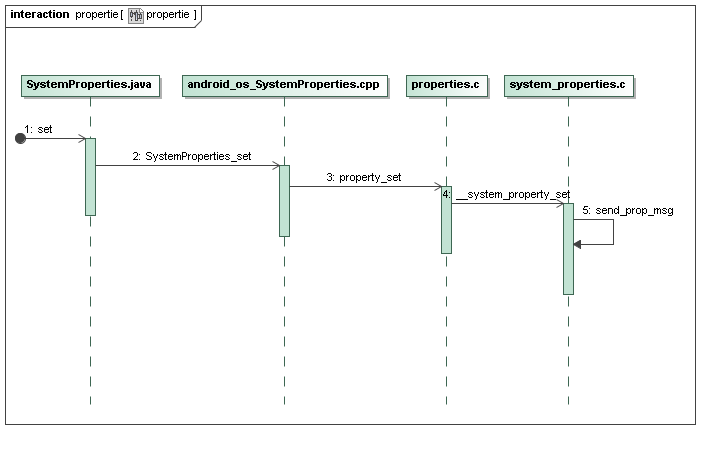
static void SystemProperties_set(JNIEnv *env, jobject clazz,
jstring keyJ, jstring valJ)
{
int err;
const char* key;
const char* val;
if (keyJ == NULL) {
jniThrowNullPointerException(env, "key must not be null.");
return ;
}
//获取属性的键
key = env->GetStringUTFChars(keyJ, NULL);
//获取属性的默认值
if (valJ == NULL) {
val = ""; /* NULL pointer not allowed here */
} else {
val = env->GetStringUTFChars(valJ, NULL);
}
err = property_set(key, val);//设置属性,这里的property_set函数与property_service.c中的property_set 是完全不同的,一个在服务端,一个在客户进程
env->ReleaseStringUTFChars(keyJ, key);
if (valJ != NULL) {
env->ReleaseStringUTFChars(valJ, val);
}
if (err < 0) {
jniThrowException(env, "java/lang/RuntimeException","failed to set system property");
}
}int property_set(const char *key, const char *value)
{
return __system_property_set(key, value);
}int __system_property_set(const char *key, const char *value)
{
int err;
int tries = 0;
int update_seen = 0;
prop_msg msg;
if(key == 0) return -1;
if(value == 0) value = "";
//判断属性的键与值的长度是否符合要求
if(strlen(key) >= PROP_NAME_MAX) return -1;
if(strlen(value) >= PROP_VALUE_MAX) return -1;
//创建并清空一个prop_msg
memset(&msg, 0, sizeof msg);
//设置消息命令码
msg.cmd = PROP_MSG_SETPROP;
//将属性的键值存放到msg中
strlcpy(msg.name, key, sizeof msg.name);
strlcpy(msg.value, value, sizeof msg.value);
//通过socket向init进程的属性服务发送消息
err = send_prop_msg(&msg);
if(err < 0) {
return err;
}
return 0;
}static int send_prop_msg(prop_msg *msg)
{
struct pollfd pollfds[1];
struct sockaddr_un addr;
socklen_t alen;
size_t namelen;
int s;
int r;
int result = -1;
//创建一个socket
s = socket(AF_LOCAL, SOCK_STREAM, 0);
if(s < 0) {
return result;
}
//设置socket地址
memset(&addr, 0, sizeof(addr));
// /dev/socket/property_service
namelen = strlen(property_service_socket);
strlcpy(addr.sun_path, property_service_socket, sizeof addr.sun_path);
addr.sun_family = AF_LOCAL;
alen = namelen + offsetof(struct sockaddr_un, sun_path) + 1;
//连接init进程中的属性服务端
if(TEMP_FAILURE_RETRY(connect(s, (struct sockaddr *) &addr, alen) < 0)) {
close(s);
return result;
}
//通过socket发送消息
r = TEMP_FAILURE_RETRY(send(s, msg, sizeof(prop_msg), 0));
if(r == sizeof(prop_msg)) {
// We successfully wrote to the property server but now we
// wait for the property server to finish its work. It
// acknowledges its completion by closing the socket so we
// poll here (on nothing), waiting for the socket to close.
// If you 'adb shell setprop foo bar' you'll see the POLLHUP
// once the socket closes. Out of paranoia we cap our poll
// at 250 ms.
pollfds[0].fd = s;
pollfds[0].events = 0;
//poll等待
r = TEMP_FAILURE_RETRY(poll(pollfds, 1, 250 /* ms */));
if (r == 1 && (pollfds[0].revents & POLLHUP) != 0) {
result = 0;
} else {
// Ignore the timeout and treat it like a success anyway.
// The init process is single-threaded and its property
// service is sometimes slow to respond (perhaps it's off
// starting a child process or something) and thus this
// times out and the caller thinks it failed, even though
// it's still getting around to it. So we fake it here,
// mostly for ctl.* properties, but we do try and wait 250
// ms so callers who do read-after-write can reliably see
// what they've written. Most of the time.
// TODO: fix the system properties design.
result = 0;
}
}
close(s);
return result;
}