Android Binder入门指南之addService详解之请求的发送
Android Binder入门指南之addService详解之请求的发送
有了前面篇章的铺垫,我想读者对Binder应该有了一定的了解了,那么我们接着继续深入了解。本篇章终于要开始讲解Client-Server交互了,如标题所示,本文要讲解的是addService请求,即添加服务请求。本文选取的切入点是MediaPlayerService服务通过addService请求注册到ServiceManager中。在这个请求中,MediaPlayerService是Client,而ServiceManager是Server。由于涉及到的过程比较复杂,这里会将addService请求分为3篇进行说明,这3篇的主题分别是:请求的发送,请求的处理,以及请求的反馈。和以往一样,在讲解详细的代码之前,先做个整体介绍。
注意:本文是基于Android 7.xx版本进行介绍的!
1.addService流程的时序图

上面是addService流程的精简时序图,理解这个图的前提是理解图中的三种角色之间的关系:
(01) MediaPlayerService和ServiceManager是两个不同的进程。它们都位于用户空间,都有各自的内存单元,两者之间不能直接进行通信;因此,需要Binder驱动的帮助才能通信。
(02) Binder驱动位于内核空间,它映射到节点"/dev/binder"上。MediaPlayerService和ServiceManager都有通过open("/dev/binder")打开该节点,并通过mmap()将内存映射到各自所在的进程中;这也就是说MediaPlayerService能和Binder驱动通信,而且ServiceManager也能和Binder驱动通信。而在Binder驱动中,有一个全局变量,依靠这个全局变量,就能实现MediaPlayerService和ServiceManager之间的通信。 依靠的这个全局变量,就是Android Binder机制(四) ServiceManager守护进程中介绍过的binder_context_mgr_node变量,它是ServiceManager的Binder实体。
搞清楚了上面三者之间的关系之后(不是三角恋),再回到时序图,来看看三者之间的交互命令:
(1) WAIT:这表示ServiceManager进程进入中断等待状态,等待客户端的到来。它进入等待状态的详细流程,在Android Binder机制(四) ServiceManager守护进程篇有详细介绍过。
(2) BC_TRANSACTION:这是MediaPlayerService进程向ServiceManager发送addService请求对应的事务。这个事务是请求,而不是回复,因此BC开头,B代表Binder,而C代表Command。如果是回复,则会以BR开发,R表示Reply。Binder驱动在收到BC_TRANSACTION之后,会将分配内存,将请求数据保存到所分配的内存中。
(3) WAKE_UP:MediaPlayerService通过BC_TRANSACTION提交一个请求,该请求是交给ServiceManager来处理的。因此,Binder驱动在收到该请求后,会将其发送到ServiceManager的待处理事务队列中,并将ServiceManager唤醒。
(4) BR_TRANSACTION_COMPLETE:MediaPlayerService在发起了一个请求之后,它需要知道该请求是否发送成功。因此,Binder驱动在将该请求提交给ServiceManager之后,会反馈一个BR_TRANSACTION_COMPLETE给MediaPlayerService,表示MediaPlayerService发送的请求已经被Binder驱动收到了。
(5) WAIT:MediaPlayerService在知道自己的请求发送成功之后,就会进入中断等待状态,等待请求的反馈。
(6)BR_NOOP和BR_TRANSACTION:ServiceManager被唤醒之后,收到Binder驱动的BR_NOOP和BR_TRANSACTION指令。BR_NOOP指令什么也不会做;而对于BR_TRANSACTION指令时,ServiceManager在解析出该事务是添加服务请求,会将MediaPlayerService的相关信息保存到一个链表中。
(7) BC_FREE_BUFFER和BC_REPLY:ServiceManager在保存了MediaPlayerService的相关信息之后,便处理完毕了MediaPlayerService的请求。此时,它便反馈BC_FREE_BUFFER和BC_REPLY给Binder驱动。Binder驱动在收到BC_FREE_BUFFER之后,会释放保存请求数据所申请的内存;收到BC_REPLY之后,Binder驱动则知道ServiceManager已经处理完了MediaPlayerService的请求。
(8) WAKE_UP:Binder驱动发送WAKE_UP唤醒MediaPlayerService进程。
(9) BR_NOOP和BR_REPLY:Binder驱动唤醒MediaPlayerService后,继续BR_NOOP和BR_REPLY给MediaPlayerService,告诉MediaPlayerService请求已经处理完毕。
(10) BR_TRANSACTION_COMPLETE:同时,Binder驱动会发送一个BR_TRANSACTION_COMPLETE给ServiceManager,告诉ServiceManager该事务已经处理完毕。 MediaPlayerService在收到BR_REPLY反馈之后,知道addService请求已经成功处理;接着,它会再次进入等待状态,等待Client的请求。
(11) WAIT:最后,ServiceManager处理MediaPlayerService的请求之后,没有其他事务可处理,也再次进入了等待状态。
2.IMediaPlayerService的类图
本文是以MediaPlayerService为例,对addService进行解析。下面让我们一起看看MediaPlayerService相关联的类图(是不是觉得有点熟悉,在前面的篇章里面也有见过不是)。
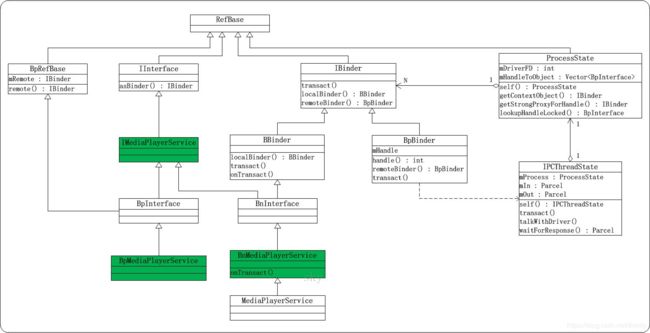
MediaPlayerService的类图和Android Binder机制(五) defaultServiceManager()的实现中IServiceManager的类图类似。这里就不再逐一对每个类进行介绍了。
需要知道的是,对于一个MediaPlayerService而言,它存在一个"远程BpBinder对象"和"本地BBinder对象"。
(1) 远程BpBinder对象的作用,是和Binder驱动进行交互。例如,当本文所讲到的addService请求,就是通过defaultServiceManager()调用到远程BpBinder对象的transact()方法,而该方法又会调用到IPCThreadState::transact()接口,通过IPCThreadState类来和Binder驱动交互。
(2) MediaPlayerService是"本地BBinder的子类"。当Client向MediaPlayerService发起请求时,会调用BBinder的onTransact()方法,而BnServiceManager又重写了该方法,从而调用onTransact()完成对请求的处理。
3.addService请求发送代码详解
在前面的章节里面,我们从时序图和类图两个维度对addService有了一个轮廓上的认识,下面我们从代码层面来分析addService请求发送的流程。
3.1 MediaPlayerService的main()函数
本篇章是以MediaPlayerService添加到ServiceManager为例来说明addService的过程,所以得先从MediaPlayerService服务入手,通过源码我们知道该服务是一个Native Service所以先从函数入口main()分析起。
int main(int argc __unused, char **argv __unused)
{
...
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm(defaultServiceManager());
...
MediaPlayerService::instantiate();
ResourceManagerService::instantiate();
...
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}
该源码的路径是frameworks/av/media/mediaserver/main_mediaserver.cpp中。这段代码比较精简(不是简单额),主要功能如下:
(1) ProcessState:self()是获取ProcessState对象,并赋值给proc。ProcessState::self(),详细的介绍在Android Binder机制(五) defaultServiceManager()的实现中已经介绍过了。
(2) defaultServiceManager()是获取IServiceManager对象,它的实现在Android Binder机制(五) defaultServiceManager()的实现中也有详细介绍。
(3) MediaPlayerService::instantiate()是初始化MediaPlayerService服务。
3.2 MediaPlayerService::instantiate()
void MediaPlayerService::instantiate() {
defaultServiceManager()->addService(
String16("media.player"), new MediaPlayerService());
}
该代码在frameworks/av/media/libmediaplayerservice/MediaPlayerService.cpp中,可以使用一句话来概括就是将MediaPlayerService添加到ServiceManager。它会新建MediaPlayerService对象;然后调用defaultServiceManager()获取到的BpServiceManager的实例然后调用BpServiceManager的addService()方法,将MediaPlayerService对象添加到Service Manager中。MediaPlayerService服务的名称是"media.player"。可以通过service list命令查看:
λ adb shell "service list | grep media.player"
143 media.player: [android.media.IMediaPlayerService]
3.3 MediaPlayerService::MediaPlayerService()
MediaPlayerService::MediaPlayerService()
{
ALOGV("MediaPlayerService created");
mNextConnId = 1;
mBatteryAudio.refCount = 0;
for (int i = 0; i < NUM_AUDIO_DEVICES; i++) {
mBatteryAudio.deviceOn[i] = 0;
mBatteryAudio.lastTime[i] = 0;
mBatteryAudio.totalTime[i] = 0;
}
// speaker is on by default
mBatteryAudio.deviceOn[SPEAKER] = 1;
// reset battery stats
// if the mediaserver has crashed, battery stats could be left
// in bad state, reset the state upon service start.
BatteryNotifier::getInstance().noteResetVideo();
MediaPlayerFactory::registerBuiltinFactories();
}
MediaPlayerService的构造函数比较简单,就是进行一些变量的初始化。没有什么好说的,其次这也不是本篇探讨的重点。
3.4 BpServiceManager::addService()
class BpServiceManager : public BpInterface<IServiceManager>
{
public:
...
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated)
{
Parcel data, reply;
//见3.6章节分析
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
//见3.7章节分析
data.writeString16(name);
//见3.8章节分析
data.writeStrongBinder(service);
//见3.9章节分析
data.writeInt32(allowIsolated ? 1 : 0);
//见3.10章节分析
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode() : err;
}
...
}
该代码在frameworks/native/libs/binder/IServiceManager.cpp中,通过前面的篇章我们知道defaultServiceManager最后通过层层的分解得到的是ServiceManager远程服务端代理BpServiceManager,最终调用BpServiceManager的addService()会先将MediaPlayerService服务的名称(“media.player”)以及它的实例等参数保存到data(Parcel对象)中,然后再调用remote()返回的BpBinder对象的transact()与Binder驱动进行交互。
(1)addService参数分析: name=“media.player”,即MediaPlayerService服务的名称;service就是MediaPlayerService对象,而IBinder是MediaPlayerService的父类;allowIsolated这个值默认为false,默认值的定义在frameworks/native/include/binder/IServiceManager.h的addService()函数声明中。
(2)数据写入分析: Parcel是Binder通信的数据存储结构,它的各个成员和函数在Android Binder机制(二) Binder中的数据结构中有详细说明。在向data中写入数据时,先通过writeInterfaceToken()写入数据头,这里的数据头是:int32的整形数+字符串(字符串是"android.os.IServiceManager")。writeString16(name)写入的是服务的名称,即"media.player"。writeStrongBinder(service)是将MediaPlayerService封装到flat_binder_object结构体中。最后的writeInt32()暂时不用关心。
下面,我们逐个对data的赋值进行介绍。
3.5 Parcel类分析
通过上面的分析可知,addService里面会创建两个Parcel的对象,下面我们来看看Parcel的构造函数。
Parcel::Parcel()
{
LOG_ALLOC("Parcel %p: constructing", this);
initState();
}
该代码定义在frameworks/native/libs/binder/Parcel.cpp,接着继续分析initState函数,该函数主要做一些初始化的工作。
void Parcel::initState()
{
mError = NO_ERROR;
mData = 0; //数据的地址指针
mDataSize = 0; //数据的大小
mDataCapacity = 0; //数据的容量
mDataPos = 0; //数据的位置
mObjects = NULL; //保存对象的地址指针
mObjectsSize = 0; //对象的个数
mObjectsCapacity = 0; //对象的容量
mNextObjectHint = 0;
mHasFds = false;
mFdsKnown = true;
mAllowFds = true;
mOwner = NULL;
mOpenAshmemSize = 0;
...
}
3.6 Parcel::writeInterfaceToken(getInterfaceDescriptor())
下面看看data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor())的实现。getInterfaceDescriptor()是通过宏IMPLEMENT_META_INTERFACE()实现的,该宏已经在Android Binder机制(五) defaultServiceManager()的实现中介绍过了;getInterfaceDescriptor()的返回是"android.os.IServiceManager",即data.writeInterfaceToken(“android.os.IServiceManager”)。下面看看writeInterfaceToken()的实现。
status_t Parcel::writeInterfaceToken(const String16& interface)
{
writeInt32(IPCThreadState::self()->getStrictModePolicy() |
STRICT_MODE_PENALTY_GATHER);
return writeString16(interface);
}
该函数先通过writeInt32()写入一个32位的int数到Parcel中,然后再通过writeString16()将字符串写入到Parcel中。它所写入的是数据头,ServiceManager中收到该数据之后,会先获取数据头,并根据数据头来判断数据的有效性! 下面继续分析该函数:
(1) IPCThreadState::self()返回IPCThreadState对象;然后,调用IPCThreadState::getStrictModePolicy(),返回的是mStrictModePolicy,mStrictModePolicy的初始值是0。因此,writeInt32()就可以简化为writeInt32(STRICT_MODE_PENALTY_GATHER)。
(2) writeString16(interface)是writeString16(“android.os.IServiceManager”)。
3.6.1 Parcel::writeInt32()
status_t Parcel::writeInt32(int32_t val)
{
return writeAligned(val);
}
writeInt32函数会调用writeAligned()。
Parcel::writeAligned()
template<class T>
//模板函数
status_t Parcel::writeAligned(T val) {
COMPILE_TIME_ASSERT_FUNCTION_SCOPE(PAD_SIZE_UNSAFE(sizeof(T)) == sizeof(T));
if ((mDataPos+sizeof(val)) <= mDataCapacity) {
restart_write:
*reinterpret_cast<T*>(mData+mDataPos) = val;
return finishWrite(sizeof(val));
}
status_t err = growData(sizeof(val));
if (err == NO_ERROR) goto restart_write;
return err;
}
writeAligned()的作用是是写入数据,譬如同步相应的变量,下面渐进分析:
(1) 在函数writeAligned()中此时mDataPos的初始值=0,sizeof(val)=4,mDataCapacity的初始值=0。因此,if((mDataPos+sizeof(val)) <= mDataCapacity)为false。
(2) 接下来,会先调用growData(sizeof(val))来增加容量,然后再将数据写入到mData中。
Parcel::growData()
status_t Parcel::growData(size_t len)
{
if (len > INT32_MAX) {
return BAD_VALUE;
}
size_t newSize = ((mDataSize+len)*3)/2;
return (newSize <= mDataSize)
? (status_t) NO_MEMORY
: continueWrite(newSize);
}
接着继续分析growData(字面理解就可以看出是增加容量),通过代码可以看出Parcel增加容量时,是按1.5倍进行增长,因为此时mDataSize=0,而len=4;因此会执行continueWrite(6)。
Parcel::continueWrite()
status_t Parcel::continueWrite(size_t desired)
{
size_t objectsSize = mObjectsSize;
...
if (mOwner) {
...
} else if (mData) {
...
// We own the data, so we can just do a realloc().
if (desired > mDataCapacity) {
uint8_t* data = (uint8_t*)realloc(mData, desired);
if (data) {
mData = data;
mDataCapacity = desired;
} else if (desired > mDataCapacity) {
...
}
} else {
...
}
} else {
...
}
return NO_ERROR;
}
接着继续分析continueWrite,此时mObjectsSize的初始值为0,mOwner的初始值为NULL,mData非空;并且,desired=6,mDataCapacity=0。因此,会调用realloc()给mData重新分配内存大小为6字节。分配成功后,更新"数据地址mData"和"数据容量mDataCapacity=6"。接下来,回到writeAligned()中,它会跳转到restart_write标签处。先将int32_t的整形数保存到mData中,然后再调用finishWrite()进行同步。
Parcel::finishWrite()
status_t Parcel::finishWrite(size_t len)
{
if (len > INT32_MAX) {
return BAD_VALUE;
}
mDataPos += len;
if (mDataPos > mDataSize) {
mDataSize = mDataPos;
...
}
return NO_ERROR;
}
下面我们继续分析finishWrite(),在前面的步骤中已经将数据写入到mData中,现在就通过finishWrite()来改变数据的当前指针位置(方便下一次写入)和数据的大小。此时
(1) len是int32_t的大小,很显然是4个字节,len=4。所以,mDataPos=4。
(2) mDataPos=4,mDataSize=0;因此if(mDataPos>mDataSize)为true,所以,mDataSize=4。
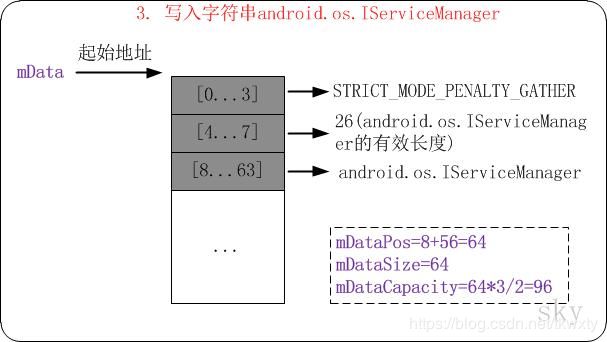
到这里我们就已经分析完了writeInterfaceToken()中的writeInt32()的所有过程了。下面让我们再理一理此时Parcel里面各个变量的值。
mData:它的第0~3个字节保存了int32_t类型的数据STRICT_MODE_PENALTY_GATHER。
mDataPos:值为4,即下一个写入mData中的数据从第4个字节开始。
mDataSize:值为4,即mData中数据的大小。
mDataCapacity:值为6,即mData的数据容量为6字节。
此时,mData的数据如下图所示:

接下来,我们继续分析writeString16(“android.os.IServiceManager”),看它是如何将字符串写入到Parcel中。
3.6.2 writeString16(interface)
status_t Parcel::writeString16(const String16& str)
{
return writeString16(str.string(), str.size());
}
status_t Parcel::writeString16(const char16_t* str, size_t len)
{
if (str == NULL) return writeInt32(-1);
//将字符串长度写入Parcel中
status_t err = writeInt32(len);
if (err == NO_ERROR) {
len *= sizeof(char16_t);//重新计算len的长度
//在将字符串写入之前,增加mData的容量
uint8_t* data = (uint8_t*)writeInplace(len+sizeof(char16_t));
if (data) {
//将字符串拷贝到mData中
memcpy(data, str, len);
//字符串结束符
*reinterpret_cast<char16_t*>(data+len) = 0;
return NO_ERROR;
}
err = mError;
}
return err;
}
让我们回到writeInterfaceToken继续分析writeString16,此时会调用重载的writeString16函数,下面我们来逐步分析:
(1) writeString16(str, len)中,str=“android.os.IServiceManager”;len是由str.size()得来,虽然这里的字符串是String16类型(即每个字符占2个字节),但是str.size()是获取str中有效数据的个数(不包含字符串结束符),因此,len=26。
(2) 首先调用writeInt32(len)将字符串的长度写入到Parcel中,writeInt32()在前面已经介绍过了。当再次写入int32_t类型的数据时,数据容量不够,会再次增长为12,即mDataCapacity=12;而写入int32_t类型的数据之后,mDataPos和mDataSize都增长为8。 此时,mData的数据如下图所示:

在调用writeInt32(len)写入数据长度之后,再重新计算len的值为52,接着通过writeInplace()写入数据。
Parcel::writeInplace()
#define PAD_SIZE_UNSAFE(s) (((s)+3)&~3)
static size_t pad_size(size_t s) {
if (s > (SIZE_T_MAX - 3)) {
abort();
}
return PAD_SIZE_UNSAFE(s);
}
void* Parcel::writeInplace(size_t len)
{
if (len > INT32_MAX) {
return NULL;
}
//4字节对齐
const size_t padded = pad_size(len);
if (mDataPos+padded < mDataPos) {
return NULL;
}
if ((mDataPos+padded) <= mDataCapacity) {
restart_write:
uint8_t* const data = mData+mDataPos;
// 如果padded!=len,则根据大端法还是小端法进行地址对齐设置。
if (padded != len) {
...
}
finishWrite(padded);
return data;
}
status_t err = growData(padded);
if (err == NO_ERROR) goto restart_write;
return NULL;
}
重点备注一下此时的入参len为54而不是52这个地方不要弄错了,至于为什么大家可以从代码里面查找到原因。下面接着继续分析代码:
(1) pad_size()是4字节对齐的宏,所以pad_size(54)计算后的结果是56。
(2) 函数的初始值为padded=56,mDataPos=8,mDataCapacity=12。因此,会先调用growData(padded)来增加数据容量。growData()在前面已经介绍过;此时,它会将容量mDataCapacity增加至96。
(3) 接着会跳转到restart_write标签处,然后调用finishWrite(padded)来更新mDataPos和mDataSize。
至此,writeInplace()就分析完了,它的作用就是增加mData的容量,并返回即将写入数据的地址。接着,我们继续回到3.6.2 writeString16章节中,执行mmap(data, str, len)将数据拷贝到mData中;拷贝完毕之后,设置字符串的结束符为0。
status_t Parcel::writeString16(const char16_t* str, size_t len)
{
if (str == NULL) return writeInt32(-1);
//将字符串长度写入Parcel中
status_t err = writeInt32(len);
if (err == NO_ERROR) {
len *= sizeof(char16_t);//重新计算len的长度
//在将字符串写入之前,增加mData的容量
uint8_t* data = (uint8_t*)writeInplace(len+sizeof(char16_t));
if (data) {
//将字符串拷贝到mData中
memcpy(data, str, len);
//字符串结束符
*reinterpret_cast<char16_t*>(data+len) = 0;
return NO_ERROR;
}
err = mError;
}
return err;
}
分析至此,addService的data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor())就分析完了。此时让我们来捋一捋Parcel已经写入的数据,其中mData中数据如下图所示:
3.7 data.writeString16(name)
继续回到addService()中,接着会通过data.writeString16(name)将MediaPlayerService服务的名称写入到data中,此处的name=“media.player”。在前面已经详细介绍过writeString16(),这里执行完该语句后,mData中的数据分布结构如下:
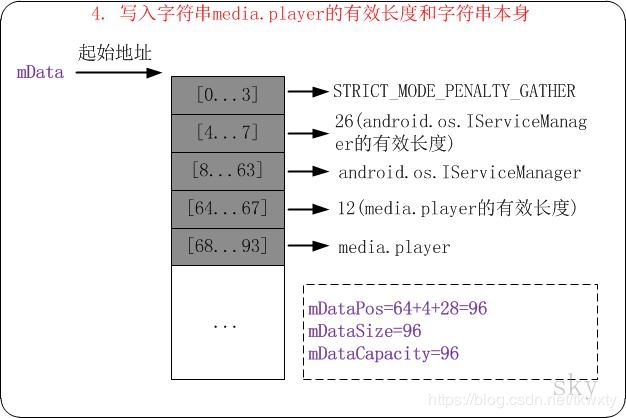
接着,addService()会调用data.writeStrongBinder(service)将MediaPlayerService对象写入到data中。这个数据最重要,这个也是Binder设计的精华所在,现在让我们分析学习一下writeStrongBinder()的实现。
3.8 data.writeStrongBinder(service)
status_t Parcel::writeStrongBinder(const sp<IBinder>& val)
{
return flatten_binder(ProcessState::self(), val, this);
}
该函数调用flatten_binder()将数据打包(将服务拍扁打包),在Parcel里面有一个与之相对应的函数unflatten_binder,这个我们在后续的章节和篇章也会讲到的。
3.8.1 Parcel::flatten_binder()
status_t flatten_binder(const sp<ProcessState>& /*proc*/,
const sp<IBinder>& binder, Parcel* out)
{
flat_binder_object obj;
obj.flags = 0x7f | FLAT_BINDER_FLAG_ACCEPTS_FDS;
if (binder != NULL) {
IBinder *local = binder->localBinder();
if (!local) {
BpBinder *proxy = binder->remoteBinder();
if (proxy == NULL) {
ALOGE("null proxy");
}
const int32_t handle = proxy ? proxy->handle() : 0;
obj.type = BINDER_TYPE_HANDLE;
obj.binder = 0; /* Don't pass uninitialized stack data to a remote process */
obj.handle = handle;
obj.cookie = 0;
} else {
//addService会走到该分支里面
obj.type = BINDER_TYPE_BINDER;
obj.binder = reinterpret_cast<uintptr_t>(local->getWeakRefs());
obj.cookie = reinterpret_cast<uintptr_t>(local);
}
} else {
obj.type = BINDER_TYPE_BINDER;
obj.binder = 0;
obj.cookie = 0;
}
return finish_flatten_binder(binder, obj, out);
}
下面让我们来分析分析该函数,该函数在addService的过程中会将MediaPlayerService对象打扁封装到结构体flat_binder_object中。Binder驱动认识flat_binder_object结构体类型的数据,在C++层将数据发送给Binder驱动后,Binder驱动能够解析该结构体。
(1) 先看看参数,proc是ProcessState对象,binder是MediaPlayerService对象,out是Parcel自己。
(2) binder不为NULL,因此,执行if(binder!=NULL)中的语句。binder->localBinder()返回的BBinder对象,即本地Binder对象。(BBinder是MediaPlayerService的父类,localBinder()函数在frameworks/native/libs/binder/Binder.cpp中实现)。因此,local不为NULL。此时的obj的赋值如下:
obj.flags = 0x7f | FLAT_BINDER_FLAG_ACCEPTS_FDS; //标记
obj.type = BINDER_TYPE_BINDER; //类型
obj.binder = reinterpret_cast<uintptr_t>(local->getWeakRefs()); //MediaPlayerService的弱引用
obj.cookie = reinterpret_cast<uintptr_t>(local); // MediaPlayerService自身
从上面的赋值结果可以看出,MediaPlayerService添加服务时,发送给驱动的数据是MediaPlayerService的本地Binder对象,即BBinder实例。准确的来说,该数据是保存在obj.cookie中的,该数据的类型是BINDER_TYPE_BINDER。
(3) 最后调用finish_flatten_binder()将数据写入到Parcel中。
3.8.2 Parcel::finish_flatten_binder()
inline static status_t finish_flatten_binder(
const sp<IBinder>& /*binder*/, const flat_binder_object& flat, Parcel* out)
{
return out->writeObject(flat, false);
}
该函数比较简单,就是将flat_binder_object对象写入到Parcel中。
3.8.3 Parcel::writeObject()
status_t Parcel::writeObject(const flat_binder_object& val, bool nullMetaData)
{
const bool enoughData = (mDataPos+sizeof(val)) <= mDataCapacity;
const bool enoughObjects = mObjectsSize < mObjectsCapacity;
if (enoughData && enoughObjects) {
restart_write:
*reinterpret_cast<flat_binder_object*>(mData+mDataPos) = val;
...
// val.binder非空
if (nullMetaData || val.binder != 0) {
//将地址偏移位置保存到mObjects[0]中
mObjects[mObjectsSize] = mDataPos;
acquire_object(ProcessState::self(), val, this, &mOpenAshmemSize);
// 增加mObjectsSize的值
mObjectsSize++;
}
return finishWrite(sizeof(flat_binder_object));
}
if (!enoughData) {
const status_t err = growData(sizeof(val));
if (err != NO_ERROR) return err;
}
if (!enoughObjects) {
//增加容量
size_t newSize = ((mObjectsSize+2)*3)/2;
//分配内存
if (newSize*sizeof(binder_size_t) < mObjectsSize) return NO_MEMORY;
binder_size_t* objects = (binder_size_t*)realloc(mObjects, newSize*sizeof(binder_size_t));
if (objects == NULL) return NO_MEMORY;
//设置mObjects的内存起始地址
mObjects = objects;
//设置mObjects对象的容量
mObjectsCapacity = newSize;
}
goto restart_write;
}
至此,让我回过头看看Parcel里面各个变量的值,此时,mDataPos=96, sizeof(val)=32, mDataCapacity=96,让我们带着这些数据来分析这段代码:
(1) 根据此时Parcel里面数据数值计算,因此,enoughData=false。mObjectsSize和mObjectsCapacity的初始值=0,因此,enoughObjects=false。
(2) 首先,执行if(!enoughData)部分,通过growData()将数据的容量增加至192(1.5倍)。即mDataCapacity=192。
(3) 接着,执行if(!enoughObjects)部分,该部分的目的是分配对象空间,并修改mObjects和mObjectsCapacity的值。增加之后的容量mObjectsCapacity=3。
(4) 然后,跳转到restart_write标签处。 reinterpret_cast
(5) mObjects[mObjectsSize]=mDataPos,此处的mObjectsSize=0;这里是将对象的地址偏移mDataPos保存到mObjects[0]中。随后执行mObjectsSize++增加mObjectsSize的值为1。
(6) 最后,调用finishWrite()更新mDataPos和mDataSize的值。
至此,data.writeStrongBinder()就分析完了。下面我们来捋一捋在将MediaPlayerService写入data之后,Parcel的数据如下图所示:

3.9 data.writeInt32(allowIsolated ? 1 : 0)
让我们继续回到addService源码里面,最后调用data.writeInt32(allowIsolated ? 1 : 0)。allowIsolated为false,因此,data.writeInt32(0)。执行该函数之后,data的数据如下图所示:

上述就是addService中data的数据的呈现和赋值,接下来执行remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply)。前面已经说过,remote()返回的是BpBinder对象,该BpBinder对象是在Android Binder机制(五) defaultServiceManager()的实现中调用defaultServiceManager()时初始化的,如果不太熟悉的可以跳转过去看看,下面查看BpBinder的transact()。
3.10 BpBinder::transact()
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
//初始值为1,在BpBinder构造的时候被赋值
if (mAlive) {
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
该代码在frameworks/native/libs/binder/BpBinder.cpp中。由于mAlive的初始值为1,因此该函数会调用IPCThreadState::self()->transact()。我们知道,IPCThreadState::self()是获取全局IPCThreadState对象,因此最终会调用IPCThreadState::transact()。 下面我们继续分析IPCThreadState::transact()。
3.11 IPCThreadState::transact()
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck();
flags |= TF_ACCEPT_FDS;
...
if (err == NO_ERROR) {
...
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
...
if ((flags & TF_ONE_WAY) == 0) {
...
if (reply) {
err = waitForResponse(reply);
} else {
...
}
} else {
//当不需要驱动反馈的时候设置flag为TF_ONE_WAY,会节省一定时间,在某些场合可以使用
err = waitForResponse(NULL, NULL);
}
return err;
}
该代码在frameworks/native/libs/binder/IPCThreadState.cpp中。来,让我们开始我们的分析之路,疤丁解牛。
(1) 先看看函数的参数。handle是BpBinder中的mHandle对象,BpBinder中的mHandle是ServiceManager的句柄,值为0。code=ADD_SERVICE_TRANSACTION。data就是在addService中设置的Parcel对象。reply是用来接收Binder驱动反馈数据的Parcel对象。flags是默认值0。
(2) 该函数会先通过writeTransactionData()将数据打包。
(3) flags的初始化为0,并且reply非空。因此,将数据打包号之后,会调用waitForResponse()将数据发送给Binder驱动,然后等待Binder驱动反馈。
3.11.1 IPCThreadState::writeTransactionData()
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
tr.target.ptr = 0;
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
} else if (statusBuffer) {
...
} else {
...
}
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
}
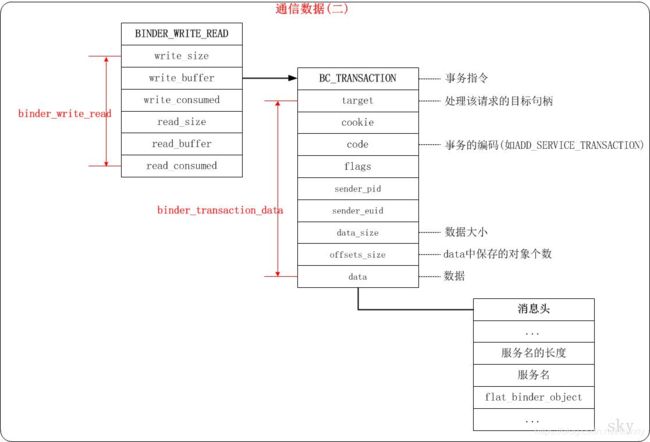
该函数会读取前面已经写入到Parcel中的数据,然后将其打包到binder_transaction_data结构体中(说实话这个函数名命名的太操蛋了,谷歌的工程师估计当时可能走神了,看到这个函数名还以为是将数据写入驱动然后发送了,然后并不是)。binder_transaction_data结构体是Binder驱动能够识别并对之进行解析的数据结构,在前面Android Binder机制(二) Binder中的数据结构中已经有关详细的介绍了,就不多赘述了。
ipcDataSize()是返回mDataSize,ipcData()是返回mData,ipcObjectsCount()是返回mObjectsSize,而ipcObjects则是返回mObjects。这些数据就是前面我们在addService中分析的Parcel对象的数据。下面给出初始化之后tr的值。
tr.target.handle = handler; //0, 即ServiceManager代理对象的默认句柄
tr.code = code; // ADD_SERVICE_TRANSACTION
tr.flags = binderFlags; // TF_ACCEPT_FDS
tr.cookie = 0;
tr.sender_pid = 0;
tr.data_size = data.ipcDataSize(); //数据大小(对应mDataSize)
tr.data.ptr.buffer = data.ipcData(); //数据的起始地址(对应mData)
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t); // data中保存的对象个数(对应mObjectsSize)
tr.data.ptr.offsets = data.ipcObjects(); // data中保存的对象的偏移地址数组(对应mObjects)
初始化结构体binder_transaction_data 完成之后,将cmd=BC_TRANSACTION和tr重新打包到mOut中。mOut中的数据将来会被以请求的方式发送给Binder驱动。重新打包后的数据如下图所示:
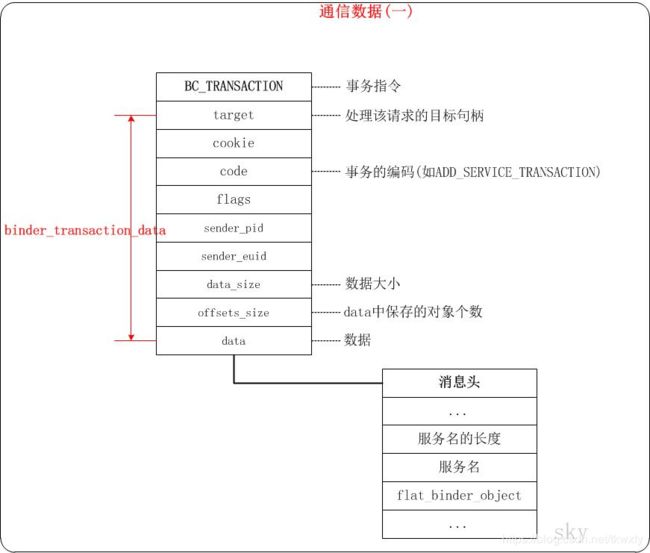
在上图中,mOut包含了"事务指令"+"binder_transaction_data"结构体对象。而具体的MediaPlayerService对象,则包含在binder_transaction_data的data数据区域;它是被封装在flat_binder_object结构体中的。
3.11.2 IPCThreadState::waitForResponse()
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;
...
if (mIn.dataAvail() == 0) continue;
cmd = (uint32_t)mIn.readInt32();
...
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
...
case BR_DEAD_REPLY:
...
case BR_FAILED_REPLY:
...
case BR_ACQUIRE_RESULT:
...
case BR_REPLY:
...
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
...
return err;
}
writeTransactionData()分析完毕之后,再看看waitForResponse()的代码,waitForResponse()会先调用talkWithDriver()和Binder驱动交互,然后根据反馈结果来分别进行处理。
3.11.3 IPCThreadState::talkWithDriver()
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
...
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
...
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
...
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
...
} while (err == -EINTR);
if (err >= NO_ERROR) {
//清空已写的数据
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
//设置已读数据
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
...
return NO_ERROR;
}
return err;
}
talkWithDriver()会先初始化bwr(binder_write_read类型的变量),然后将bwr变量通过ioctl()发送给Binder驱动。该函数的参数doReceive的默认值为true。
(1) 现在,mIn中还没有被写入数据,因此它的值都是初始值。那么,mIn.dataPosition()返回mDataPos,它的值为0;mIn.dataSize()返回mDataSize,它的初始值也为0。因此,needRead=true。
(2) doReceive=true,但是needRead=true;因此,outAvail=mOut.dataSize,outAvail不为0。接下来,就对bwr进行初始化,关于bwr的介绍,请参考Android Binder机制(二) Binder中的数据结构篇章。bwr初始化完毕之后,各个成员的值如下:
bwr.write_size = outAvail; //mOut中数据大小,大于0
bwr.write_buffer = (long unsigned int)mOut.data(); // mOut中数据的起始地址
bwr.write_consumed = 0;
bwr.read_size = mIn.dataCapacity(); // 256
bwr.read_buffer = (long unsigned int)mIn.data(); // mIn.mData,实际上为空
bwr.read_consumed = 0;
(3) bwr初始化完成之后,调用ioctl(,BINDER_WRITE_READ,)和Binder驱动进行交互。
通过binder_write_read再次打包后的数据如下图所示:
如上图所示,ioctl()传输的数据包含"BINDER_WRITE_READ"+“binder_write_read结构体对象”。在binder_write_read的write_buffer中包含了事务数据;而在数据数据的data中又包含了flat_binder_object等数据。在flat_binder_object中就包含了需要传输的MediaPlayerService对象。下面要划重点了,在面试如果你的简历中有说对Binder比较熟悉的话,一般考官都会喜欢问上面的数据结构图看看你是否真的掌握了。
总体来看,数据经过了三次封装。下面我们继续分析在Binder驱动中是如何一层层将它们剖析开来的。
3.12 Binder驱动中binder_ioctl()的BINDER_WRITE_READ相关部分的源码
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
...
//中断等待函数
// 1. 当binder_stop_on_user_error < 2为true时;不会进入等待状态;直接跳过。
// 2. 当binder_stop_on_user_error < 2为false时,进入等待状态。
// 当有其他进程通过wake_up_interruptible来唤醒binder_user_error_wait队列,并且binder_stop_on_user_error < 2为true时;
// 则继续执行;否则,再进入等待状态。
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
...
binder_lock(__func__);
//在proc进程中查找该线程对应的binder_thread;若查找失败,则新建一个binder_thread,并添加到proc->threads中。
thread = binder_get_thread(proc);
...
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
...
//将binder_write_read从“用户空间”拷贝到“内核空间”
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
...
//如果write_size>0,则进行写操作
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread, bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
...
}
//如果read_size>0,则进行读操作
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
...
}
...
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
...
}
ret = 0;
...
return ret;
}
关于该函数在Android Binder机制(四) ServiceManager守护进程中已经介绍过了。这里将binder_write_read从用户空间拷贝到内核空间之后,读取bwr.write_size和bwr.read_size都>0,因此先写后读,下面我们来逐个分析,各个击破。
3.12.1 Binder驱动中binder_thread_write()的源码
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
//读取binder_write_read.write_buffer中的内容。
//每次读取32bit(即四个字节)
while (ptr < end && thread->return_error == BR_OK) {
// 从用户空间读取32bit到内核中,并赋值给cmd。
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
...
switch (cmd) {
...
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
binder_transaction(proc, thread, &tr, cmd == BC_REPLY);
break;
}
...
}
//更新bwr.write_consumed的值
*consumed = ptr - buffer;
}
return 0;
}
读取出来的命令码是BC_TRANSACTION,所以此处走BC_TRANSACTION,在通过copy_from_user()将数据拷贝从用户空间拷贝到内核空间之后,就调用binder_transaction()进行处理。
3.12.2 Binder驱动中binder_transaction()的源码
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
struct binder_transaction *t;
struct binder_work *tcomplete;
binder_size_t *offp, *off_end;
binder_size_t off_min;
struct binder_proc *target_proc;
struct binder_thread *target_thread = NULL;
struct binder_node *target_node = NULL;
struct list_head *target_list;
wait_queue_head_t *target_wait;
struct binder_transaction *in_reply_to = NULL;
struct binder_transaction_log_entry *e;
uint32_t return_error;
...
//此时参数reply的值为0,所以会进入非replay分支
if (reply) {
...
} else {
//此时handle的值为0
if (tr->target.handle) {
...
} else {
//事务目标对象是ServiceManager得Binder实体
//即该事务是交给ServiceManager来处理的
target_node = binder_context_mgr_node;
...
}
...
//设置处理事务的目标进程
target_proc = target_node->proc;
...
}
if (target_thread) {
...
} else {
target_list = &target_proc->todo;
target_wait = &target_proc->wait;
}
...
//分配一个特处理事务t,t是binder事务(binder_transaction对象)
t = kzalloc(sizeof(*t), GFP_KERNEL);
...
//分配一个待完成的工作tcomplete,tcomplete是binder_work对象
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
...
t->debug_id = ++binder_last_id;
...
//设置from,表示该事务是MediaPlayerService发起的
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;
else
t->from = NULL;
//下面的一些赋值是初始化事务t
t->sender_euid = proc->tsk->cred->euid;
//事务将交给target_proc进程进行处理
t->to_proc = target_proc;
//事务将交给target_thread线程进行处理
t->to_thread = target_thread;
//事务编码
t->code = tr->code;
//事务标志
t->flags = tr->flags;
//事务优先级
t->priority = task_nice(current);
...
//分配空间
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
...
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id;
//保存事务
t->buffer->transaction = t;
// 保存事务的目标对象(即处理该事务的binder对象)
t->buffer->target_node = target_node;
trace_binder_transaction_alloc_buf(t->buffer);
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);
offp = (binder_size_t *)(t->buffer->data +
ALIGN(tr->data_size, sizeof(void *)));
// 将"用户空间的数据"拷贝到内核中
// tr->data.ptr.buffer就是用户空间数据的起始地址,tr->data_size就是数据大小
if (copy_from_user(t->buffer->data, (const void __user *)(uintptr_t)
tr->data.ptr.buffer, tr->data_size)) {
...
}
// 将"用户空间的数据中所含对象的偏移地址"拷贝到内核中
// tr->data.ptr.offsets就是数据中的对象偏移地址数组,tr->offsets_size就数据中的对象个数
// 拷贝之后,offp就是flat_binder_object对象数组在内核空间的偏移数组的起始地址
if (copy_from_user(offp, (const void __user *)(uintptr_t)
tr->data.ptr.offsets, tr->offsets_size)) {
...
}
...
// off_end就是flat_binder_object对象数组在内核空间的偏移地址的结束地址
off_end = (void *)offp + tr->offsets_size;
off_min = 0;
//将所有的flat_binder_object对象读取出来
//对MediaPlayerService而言,只有一个flat_binder_object对象。
for (; offp < off_end; offp++) {
struct flat_binder_object *fp;
...
fp = (struct flat_binder_object *)(t->buffer->data + *offp);
off_min = *offp + sizeof(struct flat_binder_object);
switch (fp->type) {
case BINDER_TYPE_BINDER:
case BINDER_TYPE_WEAK_BINDER: {
struct binder_ref *ref;
//在proc中查找binder实体对应的binder_node
struct binder_node *node = binder_get_node(proc, fp->binder);
//若找不到,则新建一个binder_node;下次就可以直接使用了
if (node == NULL) {
node = binder_new_node(proc, fp->binder, fp->cookie);
if (node == NULL) {
...
}
node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
node->accept_fds = !!(fp->flags & FLAT_BINDER_FLAG_ACCEPTS_FDS);
}
...
//在target_proc(即ServiceManager的进程上下文)中查找是否包行"该Binder实体的引用",
//如果没有找到的话,则将"该binder实体的引用"添加到target_proc->refs_by_node红黑树中。这样,就可以通过Service Manager对该
Binder实体进行管理了。
ref = binder_get_ref_for_node(target_proc, node);
if (ref == NULL) {
...
}
//修改type
if (fp->type == BINDER_TYPE_BINDER)
fp->type = BINDER_TYPE_HANDLE;
else
fp->type = BINDER_TYPE_WEAK_HANDLE;
fp->binder = 0;
// 修改handle。handle和binder是联合体,这里将handle设为引用的描述。
// 根据该handle可以找到"该binder实体在target_proc中的binder引用";
// 即,可以根据该handle,可以从Service Manager找到对应的Binder实体的引用,从而获取Binder实体。
fp->handle = ref->desc;
// 增加引用计数,防止"该binder实体"在使用过程中被销毁。
fp->handle = ref->desc;
fp->cookie = 0;
binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE,
&thread->todo);
trace_binder_transaction_node_to_ref(t, node, ref);
...
} break;
...
}
}
if (reply) {
...
} else if (!(t->flags & TF_ONE_WAY)) {
BUG_ON(t->buffer->async_transaction != 0);
t->need_reply = 1;
t->from_parent = thread->transaction_stack;
//将当前事务添加到当前线程的事务栈中
thread->transaction_stack = t;
} else {
...
}
//设置事务的类型为BINDER_WORK_TRANSACTION
t->work.type = BINDER_WORK_TRANSACTION;
//将事务添加到target_list队列中,即target_list的待处理事务中
list_add_tail(&t->work.entry, target_list);
// 设置待完成工作的类型为BINDER_WORK_TRANSACTION_COMPLETE
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
// 将待完成工作添加到thread->todo队列中,即当前线程的待完成工作中。
list_add_tail(&tcomplete->entry, &thread->todo);
//唤醒目标进程
if (target_wait)
wake_up_interruptible(target_wait);
return;
...
}
(1) 先对入参的参数分析一把,此时tr->target.handle=0且reply也为0,因此,会设置target_node为ServiceManager对应的Binder实体。下面是target_node,target_proc等值初始化之后的值。
target_node = binder_context_mgr_node; // 目标节点为Service Manager对应的Binder实体
target_proc = target_node->proc; // 目标进程为Service Manager对应的binder_proc进程上下文信息
target_list = &target_thread->todo; // 待处理事务队列
target_wait = &target_thread->wait; // 等待队列
(2) 分析至此,我们现在已经知道目标节点是Service Manager对应的Binder实体。这是指MediaPlayerService的addService()这个指令是来提交给Service Manager进行处理的,它最终会发送给Service Manager进行处理。
(3) 在初始化完target_node等目标节点之后,会新建一个待处理事务t和待完成的工作tcomplete,并对它们进行初始化。待处理事务t会被提交给目标(即ServiceManager对应的Binder实体)进行处理;而待完成的工作tcomplete则是为了反馈给MediaPlayerService服务,告诉MediaPlayerService它的请求Binder驱动已经收到了。注意,这里仅仅是告诉MediaPlayerService该请求已经被收到,而不是处理完毕!待ServiceManager处理完毕该请求之后,Binder驱动会再次反馈相应的消息给MediaPlayerService。
//分配一个特处理事务t,t是binder事务(binder_transaction对象)
t = kzalloc(sizeof(*t), GFP_KERNEL);
...
//分配一个待完成的工作tcomplete,tcomplete是binder_work对象
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
...
t->debug_id = ++binder_last_id;
...
//设置from,表示该事务是MediaPlayerService发起的
if (!reply && !(tr->flags & TF_ONE_WAY))
t->from = thread;
else
t->from = NULL;
//下面的一些赋值是初始化事务t
t->sender_euid = proc->tsk->cred->euid;
//事务将交给target_proc进程进行处理
t->to_proc = target_proc;
//事务将交给target_thread线程进行处理
t->to_thread = target_thread;
//事务编码
t->code = tr->code;
//事务标志
t->flags = tr->flags;
//事务优先级
t->priority = task_nice(current);
...
//分配空间
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, !reply && (t->flags & TF_ONE_WAY));
...
t->buffer->allow_user_free = 0;
t->buffer->debug_id = t->debug_id;
//保存事务
t->buffer->transaction = t;
// 保存事务的目标对象(即处理该事务的binder对象)
t->buffer->target_node = target_node;
trace_binder_transaction_alloc_buf(t->buffer);
if (target_node)
binder_inc_node(target_node, 1, 0, NULL);
(4) 在初始化完待处理事务t之后,接着将MediaPlayerService请求的数据拷贝到内核空间并解析出来。从数据中解析出MediaPlayerService请求数据中的flat_binder_object对象,只有一个flat_binder_object对象。该flat_binder_object对象的类型是BINDER_TYPE_BINDER,然后调用binder_get_node()在当前进程的上下文环境proc中查找fp->binder对应的Binder实体,fp->binder是Android的flatten_binder()中赋值的,它是MediaPlayerService对象的本地引用的描述(即MediaPlayerService对应的BBinder对象的描述);此外,在MediaPlayerService是初次与Binder驱动通信,因此肯定找不到该对象fp->binder对应的Binder实体;因此node=NULL。 接下来,就调用binder_new_node()新建fp->binder对应的Binder实体,这也就是MediaPlayerService对应的Binder实体。然后,调用binder_get_ref_for_node(target_proc, node)获取该Binder实体在target_proc(即ServiceManager的进程上下文环境)中的Binder引用,此时,在target_proc中肯定也找不到该Binder实体对应的引用;那么,就新建Binder实体的引用,并将其添加到target_proc->refs_by_node红黑树 和 target_proc->refs_by_desc红黑树中。 这样,Service Manager的进程上下文中就存在MediaPlayerService的Binder引用,Service Manager也就可以对MediaPlayerService进行管理了!然后,修改fp->type=BINDER_TYPE_HANDLE,并使fp->handle = ref->desc。这样,就将MediaPlayerService的请求数据解析出来,并且在Binder驱动中创建了MediaPlayerService对应的Binder实体,而且将该Binder实体添加到MediaPlayerService的进程上下文proc中。更重要的是,在ServiceManager的refs_by_node和refs_by_desc这两颗红黑树中创建了"MediaPlayerService对应的Binder实体的Binder引用"。这意味着,在Binder驱动中,已经能在ServiceManager的进程上下文中找到MediaPlayerService。
// 将"用户空间的数据中所含对象的偏移地址"拷贝到内核中
// tr->data.ptr.offsets就是数据中的对象偏移地址数组,tr->offsets_size就数据中的对象个数
// 拷贝之后,offp就是flat_binder_object对象数组在内核空间的偏移数组的起始地址
if (copy_from_user(offp, (const void __user *)(uintptr_t)
tr->data.ptr.offsets, tr->offsets_size)) {
...
}
...
// off_end就是flat_binder_object对象数组在内核空间的偏移地址的结束地址
off_end = (void *)offp + tr->offsets_size;
off_min = 0;
//将所有的flat_binder_object对象读取出来
//对MediaPlayerService而言,只有一个flat_binder_object对象。
for (; offp < off_end; offp++) {
struct flat_binder_object *fp;
...
fp = (struct flat_binder_object *)(t->buffer->data + *offp);
off_min = *offp + sizeof(struct flat_binder_object);
switch (fp->type) {
case BINDER_TYPE_BINDER:
case BINDER_TYPE_WEAK_BINDER: {
struct binder_ref *ref;
//在proc中查找binder实体对应的binder_node
struct binder_node *node = binder_get_node(proc, fp->binder);
//若找不到,则新建一个binder_node;下次就可以直接使用了
if (node == NULL) {
node = binder_new_node(proc, fp->binder, fp->cookie);
if (node == NULL) {
...
}
node->min_priority = fp->flags & FLAT_BINDER_FLAG_PRIORITY_MASK;
node->accept_fds = !!(fp->flags & FLAT_BINDER_FLAG_ACCEPTS_FDS);
}
...
//在target_proc(即ServiceManager的进程上下文)中查找是否包行"该Binder实体的引用",
//如果没有找到的话,则将"该binder实体的引用"添加到target_proc->refs_by_node红黑树中。这样,就可以通过Service Manager对该Binder实体进行管理了。
ref = binder_get_ref_for_node(target_proc, node);
if (ref == NULL) {
...
}
//修改type
if (fp->type == BINDER_TYPE_BINDER)
fp->type = BINDER_TYPE_HANDLE;
else
fp->type = BINDER_TYPE_WEAK_HANDLE;
fp->binder = 0;
// 修改handle。handle和binder是联合体,这里将handle设为引用的描述。
// 根据该handle可以找到"该binder实体在target_proc中的binder引用";
// 即,可以根据该handle,可以从Service Manager找到对应的Binder实体的引用,从而获取Binder实体。
fp->handle = ref->desc;
// 增加引用计数,防止"该binder实体"在使用过程中被销毁。
fp->handle = ref->desc;
fp->cookie = 0;
binder_inc_ref(ref, fp->type == BINDER_TYPE_HANDLE,
&thread->todo);
trace_binder_transaction_node_to_ref(t, node, ref);
...
} break;
...
}
}
(5) 然后,设置待处理事务的类型为BINDER_WORK_TRANSACTION,并将其添加到target_list中。即,添加事务到Service Manager对应的待处理事务队列中。
设置待完成工作的类型为BINDER_WORK_TRANSACTION_COMPLETE,并将其添加到当前线程的待完成工作中。此时,Binder驱动已经收到了MediaPlayerService的请求,这个所谓的待完成工作,就是用来让Binder驱动告诉MediaPlayerService,它的请求已经被处理了。
最后,target_wait是ServiceManager的等待队列,肯定不为空(因为前面刚刚将BINDER_WORK_TRANSACTION事务添加到待处理事务中)。因此,便会执行wake_up_interruptible(target_wait)唤醒Service Manager进程。
注意,此时都是运行在MediaPlayerService的进程中的!
//设置事务的类型为BINDER_WORK_TRANSACTION
t->work.type = BINDER_WORK_TRANSACTION;
//将事务添加到target_list队列中,即target_list的待处理事务中
list_add_tail(&t->work.entry, target_list);
// 设置待完成工作的类型为BINDER_WORK_TRANSACTION_COMPLETE
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
// 将待完成工作添加到thread->todo队列中,即当前线程的待完成工作中。
list_add_tail(&tcomplete->entry, &thread->todo);
//唤醒目标进程
if (target_wait)
wake_up_interruptible(target_wait);
return;
此时,MediaPlayerService进程还会继续运行,而且它也通过wake_up_interruptible()唤醒了ServiceManager进程。ServiceManager被唤醒后,所做的工作就是将MediaPlayerService注册到它的服务队列中进行管理;它的具体流程稍候再分析,现在还是先分析完MediaPlayerService进程。
分析至此,binder_transaction()就分析完了。在binder_transaction()中,我们主要进行了以下工作,下面我们总结概括一下:
(01) 解析出来MediaPlayerService的请求数据、
(02) 新建MediaPlayerService对应的Binder实体和Binder引用,并在ServiceManager的进程上下文中保存MediaPlayerService的Binder引用。
(03) 新建待处理事务,并将该事务添加到ServiceManager的待处理事务队列中。然后,唤醒ServiceManager来处理该事务。
(04) 新建了待完成工作,并将待完成工作添加到当前线程的待完成工作队列中中。
3.12.3 Binder驱动中binder_thread_write()的源码
分析完binder_transaction()后,跳出接着分析MediaPlayerService进程的工作,此时binder_thread_write()中执行binder_transaction()后,会更新*consumed的值,即bwr.write_consumed的值。意味着,Binder驱动已经驱动完成MediaPlayerService的请求数据。
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
//读取binder_write_read.write_buffer中的内容。
//每次读取32bit(即四个字节)
while (ptr < end && thread->return_error == BR_OK) {
// 从用户空间读取32bit到内核中,并赋值给cmd。
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
...
switch (cmd) {
...
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
binder_transaction(proc, thread, &tr, cmd == BC_REPLY);
break;
}
...
}
//更新bwr.write_consumed的值
*consumed = ptr - buffer;
}
return 0;
}
3.12.4 Binder驱动中binder_thread_read()的源码
让我们继续分析,接下来ioctl()会执行binder_thread_read()来设置反馈数据给MediaPlayerService进程。让我们带着愉悦的心情分析一番:
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed, int non_block)
{
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
//如果*consumed=0,则写入BR_NOOP到用户传进来的bwr.read_buffer缓存区
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
}
retry:
//等待proc进程的事务标记。
//当线程的事务栈为空 并且 待处理事务队列为空时,该标记位true。
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
...
thread->looper |= BINDER_LOOPER_STATE_WAITING;
if (wait_for_proc_work)
proc->ready_threads++;
...
if (wait_for_proc_work) {
...
} else {
if (non_block) {
...
} else
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
}
binder_lock(__func__);
if (wait_for_proc_work)
proc->ready_threads--;
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
...
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
//如果当前线程的"待完成工作"不为空,则取出待完成工作
if (!list_empty(&thread->todo))
w = list_first_entry(&thread->todo, struct binder_work, entry);
else if (!list_empty(&proc->todo) && wait_for_proc_work)
...
else {
if (ptr - buffer == 4 && !(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN)) /* no data added */
goto retry;
break;
}
...
switch (w->type) {
...
case BINDER_WORK_TRANSACTION_COMPLETE: {
cmd = BR_TRANSACTION_COMPLETE;
// 将BR_TRANSACTION_COMPLETE写入到用户缓冲空间中
if (put_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
binder_stat_br(proc, thread, cmd);
...
//待完成事务已经处理完毕,将其从待完成事务队列中删除
list_del(&w->entry);
kfree(w);
binder_stats_deleted(BINDER_STAT_TRANSACTION_COMPLETE);
} break;
...
}
if (!t)
continue;
...
//更新bwr.read_consumed的值
*consumed = ptr - buffer;
...
return 0;
}
代码虽然不多,但是信息量还是比较大的,下面让我们来逐层分析,步步为营:
(1) 先看看函数的参数,buffer是bwr.read_buffer,是反馈数据缓冲区。size是bwr.read_size,是缓冲区大小,为256字节;而consumed是指向bwr.read_consumed的,它的值是0,表示反馈数据还没有被MediaPlayerService读取过。non_block为0。
(2) consumed=0,因此会先将BR_NOOP从内核空间拷贝到用户空间,即拷贝到bwr.read_buffer中。
(3) 在binder_transaction()中,我们有添加待完成工作到thread的待完成工作队列中。因此,wait_for_proc_work是false。
(4) binder_has_thread_work(thread)为ture,因此wait_event_interruptible()不会进入中断等待状态,而是继续往下运行。
(5) 接着,进入while循环。list_empty(&thread->todo)为flase,执行list_first_entry(&thread->todo, struct binder_work, entry)从thread的待完成工作队列中取出待完成的工作t。
(6) 根据binder_transaction()中的分析可知,t->type的值为BINDER_WORK_TRANSACTION_COMPLETE。执行对应的case分支,会将数据cmd=BR_TRANSACTION_COMPLETE拷贝到用户空间,即bwr.read_buffer中。拷贝之后,即代表该工作已完成,然后从当前线程的工作队列中将该工作删除,并释放所分配的空间。
(7) 由于t=null,因此,会再次从头开始执行while循环。而此时,list_empty(&thread->todo)为true,并且list_empty(&proc->todo)也为true;因此会执行break跳出while循环。
(8) 在跳出while循环之后,会更新consumed的值。即,更新bwr.read_consumed的值。此时,由于写入了BR_NOOP和BR_TRANSACTION_COMPLETE两个指令,bwr.read_consumed=8。
接下来,回到binder_ioctl()中。将bwr数据拷贝到用户空间后返回。此时,bwr中各个参数的值如下:
bwr.write_size = outAvail;
bwr.write_buffer = (long unsigned int)mOut.data();
bwr.write_consumed = outAvail; // 等于write_size
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (long unsigned int)mIn.data(); // 存储了BR_NOOP和BR_TRANSACTION_COMPLETE两个返回指令
bwr.read_consumed = 8; // 等于read_size
bwr中的write参数是保存"MediaPlayerService发送给Binder驱动的请求内容的",而read则是保存"Binder驱动反馈给MediaPlayerService的内容的"。此时,write_consumed和write_size相同,意味着"Binder驱动已经将请求的内容都处理完毕了";而read_consumed>0,则意味着"Binder驱动有反馈内容给MediaPlayerService"。
回到talkWithDriver()中,看看ioctl()之后做了些什么?
3.13 重返IPCThreadState::transact()
通过前面分析可知,此时代码已经从驱动层返回到了应用层,那么让我们一起跟着代码的脚步来到应用层继续分析吗。
3.13.1 IPCThreadState::talkWithDriver()
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
...
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
...
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
...
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
...
} while (err == -EINTR);
if (err >= NO_ERROR) {
//清空已写的数据
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
//设置已读数据
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
...
return NO_ERROR;
}
return err;
}
ioctl()从驱动层返回以后的返回值为0,所以err=NO_ERROR,此时退出while循环。接着代码往下执行:
(1) bwr.write_consumed>0,并且bwr.write_consumed=mOut.dataSize。因此,调用mOut.setDataSize(0)将释放mOut的内存,并且将mOut的mDataSize和mObjectsSize设为0。
(2) bwr.read_consumed>0,因此调用mIn.setDataSize()为mIn分配空间,并将mIn的mDataSize设为=bwr.read_consumed。然后,将位置mDataPos初始化为0。
之后,跳出talkWithDriver(),返回到waitForResponse()中。
3.13.2 IPCThreadState::waitForResponse()
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
if ((err=talkWithDriver()) < NO_ERROR) break;
...
if (mIn.dataAvail() == 0) continue;
cmd = (uint32_t)mIn.readInt32();
...
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
...
case BR_DEAD_REPLY:
...
case BR_FAILED_REPLY:
...
case BR_ACQUIRE_RESULT:
...
case BR_REPLY:
...
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
...
return err;
}
此时函数从从talkWithDriver()正常返回,接着执行代码读取mIn中的数据。而mIn中的数据就是Binder驱动返回的"BR_NOOP和BR_TRANSACTION_COMPLETE两个指令"。先读出的指令是BR_NOOP,因此这里执行executeCommand(cmd)。(读者可以缓一缓,上个厕所干个啥的,内容有点多啊)
3.13.3 IPCThreadState::executeCommand()
status_t IPCThreadState::executeCommand(int32_t cmd)
{
BBinder* obj;
RefBase::weakref_type* refs;
status_t result = NO_ERROR;
...
switch (cmd) {
case BR_ERROR:
...
case BR_OK:
...
case BR_NOOP:
break;
default:
...
}
if (result != NO_ERROR) {
mLastError = result;
}
return result;
}
此时入参的参数cmd=BR_NOOP没有进行任何的操作,直接返回。继续回到waitForResponse()中,重新开始while循环,执行talkWithDriver()。
3.13.4 IPCThreadState::talkWithDriver()
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
...
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
...
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
...
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
...
} while (err == -EINTR);
if (err >= NO_ERROR) {
//清空已写的数据
if (bwr.write_consumed > 0) {
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
//设置已读数据
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
...
return NO_ERROR;
}
return err;
}
弯弯绕绕又回到了这里,你说我们容易吗。好吗,废话有点多,让我们接着继续分析:
(1) 此时,因为在waitForResponse()中已经通过mIn.readInt32()读取了4个字节,因此mIn.dataPosition()=4,而此时mIn.dataSize()=8;因此,needRead=false。
(2) 此时needRead=false,而doRecive=true,所以计算得出outAvail=0。最终,由于 bwr.write_size和bwr.read_size都为0,因此直接返回NO_ERROR。
(3) 再次回到waitForResponse()中,此时读出的cmd为BR_TRANSACTION_COMPLETE。此时,由于reply不为NULL,不会跳出while循环,因此再次重新执行while循环,调用talkWithDriver()。
(4) 此时,已经读取了mIn中的全部数据,因此mIn.dataPosition()=8,而mIn.dataSize()=8;因此,needRead=true。
(5) outAvail=mOut.dataSize(),前面已经将mOut清空,因此outAvail=0。bwr初始化完毕之后,各个成员的值如下:
bwr.write_size = 0;
bwr.write_buffer = (long unsigned int)mOut.data();
bwr.write_consumed = 0;
bwr.read_size = mIn.dataCapacity(); // 256字节
bwr.read_buffer = (long unsigned int)mIn.data();
bwr.read_consumed = 0;
(7) 分析到这里,此时MediaPlayerService已经处理完"addService()这个请求,包括已经处理完了该请求的反馈"。对MediaPlayerService而言,它已经成功的注册到Service Manager中;接下来,就是等待Client的请求了。
那么如何去等待Client的请求呢?这和前面分析Service Manager服务启动之后等待Client的请求类似。MediaPlayerService服务,会通过ioctl()给Binder驱动发送读写请求,而此时的bwr.write_size=0,意味着不会进行写;bwr.read_size>0,意味着会进行读。这样,Binder驱动就会执行读取动作,进而去查看"MediaPlayerService在Binder驱动中的待处理事务队列"是否有事务需要处理,有的话,就进行事务处理;否则,就进入中断等待状态,等待Client的请求。能有啥办法呢,只能接着继续分析了。
3.14 再探Binder驱动
各位读者请系好安全带,抓紧扶手,振作精神,我们得继续Binder驱动层深入分析了。木有办法Binder深入就是有这么的折腾。
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
...
//中断等待函数
// 1. 当binder_stop_on_user_error < 2为true时;不会进入等待状态;直接跳过。
// 2. 当binder_stop_on_user_error < 2为false时,进入等待状态。
// 当有其他进程通过wake_up_interruptible来唤醒binder_user_error_wait队列,并且binder_stop_on_user_error < 2为true时;
// 则继续执行;否则,再进入等待状态。
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
...
binder_lock(__func__);
//在proc进程中查找该线程对应的binder_thread;若查找失败,则新建一个binder_thread,并添加到proc->threads中。
thread = binder_get_thread(proc);
...
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
...
//将binder_write_read从“用户空间”拷贝到“内核空间”
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
...
//如果write_size>0,则进行写操作
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread, bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
...
}
//如果read_size>0,则进行读操作
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
...
}
...
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
...
}
ret = 0;
...
return ret;
此时,bwr.write_size=0,因此只读不写,不会执行binder_thread_write()。而此时bwr.read_size>0,因此会调用binder_thread_read()进行读取动作。
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
void __user *buffer, int size,
signed long *consumed, int non_block)
{
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
// 如果*consumed=0,则写入BR_NOOP到用户传进来的bwr.read_buffer缓存区
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
// 修改指针位置
ptr += sizeof(uint32_t);
}
retry:
// 等待proc进程的事务标记。
// 当线程的事务栈为空 并且 待处理事务队列为空时,该标记位true。
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
...
if (wait_for_proc_work) {
...
// 设置当前线程的优先级=proc->default_priority。
// 即,当前线程要处理proc的事务,所以设置优先级和proc一样。
binder_set_nice(proc->default_priority);
if (non_block) {
...
} else
// 阻塞式的读取,则阻塞等待事务的发生。
ret = wait_event_interruptible_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else {
...
}
...
}
此时的我有点凌乱,有点紧张因为本篇章快要结束了。继续分析
(1) 此时,bwr.read_consumed=0,意味着*consumed=0。因此,还是会先将BR_NOOP写入到bwr.read_buffer中。
(2) 此时,当前线程的事务栈和待处理事务队列都是空,因此wait_for_proc_work=true。
(3) 在调用binder_set_nice()设置当前线程的优先级之后,就会调用wait_event_interruptible()。而此时binder_has_proc_work()为false,因此当前线程会进入中断等待状态。当Service Manager处理完MediaPlayerService的请求之后,就会将其唤醒。
总结
此时的你是不是有点小激动,我的妈呀我竟然看到这里了!你值得骄傲,能看到此处的都是好汉。至此,MediaPlayerService进程的addService的请求发送部分就讲解完了。在继续了解请求的处理之前,先回顾一下本部分的内容。

如上图所示,MediaPlayerService发送一个BC_TRANSACTION事务给Binder驱动。Binder驱动收到该事务之后,对请求数据进行解析,在Kernel中新建了MediaPlayerService对应的Binder实体,并将在ServiceManager的进程上下文中添加了该Binder实体的Binder引用。解析完数据之后,新增一个待处理事务并提交到ServiceManager的待处理事务列表中;接着,就唤醒了ServiceManager。与此同时,Binder驱动还反馈了一个BR_TRANSACTION_COMPLETE给MediaPlayerService,告诉MediaPlayerService它的addService请求已经发送成功;MediaPlayerService在解析完BR_TRANSACTION_COMPLETE之后,就进入等待状态,等待ServiceManager的处理完请求之后反馈结果给它。
有了一个好的开头,那么在接下来的篇章中,我们将继续分析ServiceManager被唤醒后,具体都做了些什么工作!聪明的你应该可以想得到做了些什么,让我们下个篇章继续分析。