总体
在librbd中的代码中,几乎所有的操作都是异步的,下面以一段代码为例,分析其操作流程。
下面的代码是rbd 创建image流程中,创建id obj的步骤。其最终效果是在rbd对应的pool中创建一个名为rbd_id.的对象,该对象的内容为rbd的id。
// 创建一个op对象,后续的操作会先存入该对象,不会被执行
// 所有存入的操作会按顺序聚合成一个原子batch
// 直到aio_operate调用时才开始异步执行
// 所有操作执行完成后,会调用AioCompletion上注册的回调W函数
librados::ObjectWriteOperation op;
// 在op内存入一个create操作
op.create(true);
// 在op内存入一个set_id操作(细节与op.create不同,本质上一样)
cls_client::set_id(&op, m_image_id);
// handle_create_id_object为op上所有操作都完成后执行的回调函数
using klass = CreateRequest;
librados::AioCompletion *comp =
create_rados_callback(this);
// 开始
int r = m_ioctx.aio_operate(m_id_obj, comp, &op);
assert(r == 0);
comp->release();
上面代码涉及到的内容主要有以下几点:
- ObjectXXXXOperation对象的作用
- ceph的cls_client调用注册函数的方式
- AioCompletion是什么
- aio_operate背后做了什么
ObjectXXXXOperation
librados::ObjectWriteOperation
从ObjectWriteOperation的注释中,可以看到一些内容,该对象将多个写操作聚合成一个请求。其本身没有太多内容,只是包含了各种操作函数的接口。
/*
* ObjectWriteOperation : compound object write operation
* Batch multiple object operations into a single request, to be applied
* atomically.
*/
class CEPH_RADOS_API ObjectWriteOperation : public ObjectOperation
{
protected:
time_t *unused;
public:
ObjectWriteOperation() : unused(NULL) {}
~ObjectWriteOperation() override {}
// 开头代码片中调用的create函数
void create(bool exclusive)
{
::ObjectOperation *o = &impl->o;
o->create(exclusive);
}
...
// 成员函数,太多,略去
};
librados::ObjectOperation
所有类似ObjectWriteOperation的类,都继承自librados::ObjectOperation。其具体实现在ObjectOperationImpl中。
class CEPH_RADOS_API ObjectOperation
{
...
protected:
ObjectOperationImpl *impl;
};
librados::ObjectOperationImpl
仍然没有太多内容,关键内容应该在::ObjectOperation中。继续看。
struct ObjectOperationImpl {
::ObjectOperation o;
real_time rt;
real_time *prt;
ObjectOperationImpl() : prt(NULL) {}
};
::ObjectOperation
这个类是机制的核心。具体见注释。
struct ObjectOperation {
vector ops; // 操作数组
int flags; // flags
int priority; // 优先级
vector out_bl; // 用于存放ops每个操作的输出内容
vector out_handler; // 存放ops每个操作完成后执行的回调函数
vector out_rval; // 存放ops每个操作的返回值
// 为了便于理解上述参数内容。给出了两个函数
OSDOp& add_op(int op) {
int s = ops.size();
ops.resize(s+1);
ops[s].op.op = op;
out_bl.resize(s+1);
out_bl[s] = NULL;
out_handler.resize(s+1);
out_handler[s] = NULL;
out_rval.resize(s+1);
out_rval[s] = NULL;
return ops[s];
}
// 开头代码片中create函数最终做的事
// 仅仅是在ops数组中增加了一项,并没有执行操作
void create(bool excl) {
OSDOp& o = add_op(CEPH_OSD_OP_CREATE);
o.op.flags = (excl ? CEPH_OSD_OP_FLAG_EXCL : 0);
}
// 省略其他成员函数
...
};
cls_client
cls后端的注册和调用机制先不去关注(值得单独分析下了)。这只看cls_client如何调用已经注册的函数。
以上面的set_id为例。
cls_client::set_id
可以看到,这里是将输入编码到bufflist中,然后转调ObjectWriteOperation的exec函数。
void set_id(librados::ObjectWriteOperation *op, const std::string id)
{
bufferlist bl;
encode(id, bl);
op->exec("rbd", "set_id", bl);
}
librados::ObjectOperation::exec
可以看到,cls_client下的函数不会直接执行,也是通过ObjectOperation函数的机制来执行的。
void librados::ObjectOperation::exec(const char *cls, const char *method, bufferlist& inbl)
{
::ObjectOperation *o = &impl->o;
o->call(cls, method, inbl);
}
::ObjectOperation::call
void call(const char *cname, const char *method, bufferlist &indata) {
add_call(CEPH_OSD_OP_CALL, cname, method, indata, NULL, NULL, NULL);
}
::ObjectOperation::add_call
之前直接在op上调用的create函数,是通过add_op增加了独立的一个CEPH_OSD_OP_CREATE操作。而cls相关的函数则通过add_call增加,共享CEPH_OSD_OP_CALL操作。不同函数通过在indata中增加classname和methodname来区分。
void add_call(int op, const char *cname, const char *method,
bufferlist &indata,
bufferlist *outbl, Context *ctx, int *prval) {
OSDOp& osd_op = add_op(op);
unsigned p = ops.size() - 1;
out_handler[p] = ctx;
out_bl[p] = outbl;
out_rval[p] = prval;
osd_op.op.cls.class_len = strlen(cname);
osd_op.op.cls.method_len = strlen(method);
osd_op.op.cls.indata_len = indata.length();
osd_op.indata.append(cname, osd_op.op.cls.class_len);
osd_op.indata.append(method, osd_op.op.cls.method_len);
osd_op.indata.append(indata);
}
AioCompletion
AioCompletion主要是用于封装和调用op执行完成后的回调函数的。
其创建过程。
create_rados_callback
template
librados::AioCompletion *create_rados_callback(T *obj) {
return librados::Rados::aio_create_completion(
obj, &detail::rados_callback, nullptr);
}
aio_create_completion
librados::AioCompletion *librados::Rados::aio_create_completion(void *cb_arg,
callback_t cb_complete,
callback_t cb_safe)
{
AioCompletionImpl *c;
int r = rados_aio_create_completion(cb_arg, cb_complete, cb_safe, (void**)&c);
assert(r == 0);
return new AioCompletion(c);
}
rados_aio_create_completion
extern "C" int rados_aio_create_completion(void *cb_arg,
rados_callback_t cb_complete,
rados_callback_t cb_safe,
rados_completion_t *pc)
{
tracepoint(librados, rados_aio_create_completion_enter, cb_arg, cb_complete, cb_safe);
librados::AioCompletionImpl *c = new librados::AioCompletionImpl;
if (cb_complete)
c->set_complete_callback(cb_arg, cb_complete);
if (cb_safe)
c->set_safe_callback(cb_arg, cb_safe);
*pc = c;
tracepoint(librados, rados_aio_create_completion_exit, 0, *pc);
return 0;
}
AioCompletion
struct CEPH_RADOS_API AioCompletion {
AioCompletion(AioCompletionImpl *pc_) : pc(pc_) {}
int set_complete_callback(void *cb_arg, callback_t cb);
int set_safe_callback(void *cb_arg, callback_t cb);
int wait_for_complete();
int wait_for_safe();
int wait_for_complete_and_cb();
int wait_for_safe_and_cb();
bool is_complete();
bool is_safe();
bool is_complete_and_cb();
bool is_safe_and_cb();
int get_return_value();
int get_version() __attribute__ ((deprecated));
uint64_t get_version64();
void release();
AioCompletionImpl *pc;
};
AioCompletionImpl
struct librados::AioCompletionImpl {
Mutex lock;
Cond cond;
int ref, rval;
bool released;
bool complete;
version_t objver;
ceph_tid_t tid;
rados_callback_t callback_complete, callback_safe;
void *callback_complete_arg, *callback_safe_arg;
// for read
bool is_read;
bufferlist bl;
bufferlist *blp;
char *out_buf;
IoCtxImpl *io;
ceph_tid_t aio_write_seq;
xlist::item aio_write_list_item; //默认值为this
int set_complete_callback(void *cb_arg, rados_callback_t cb);
int set_safe_callback(void *cb_arg, rados_callback_t cb);
int wait_for_complete();
int wait_for_safe();
int is_complete();
int is_safe();
int wait_for_complete_and_cb();
int wait_for_safe_and_cb();
int is_complete_and_cb();
int is_safe_and_cb();
int get_return_value();
uint64_t get_version();
void get();
void _get();
void release();
void put();
void put_unlock();
};
aio_operate
librados::IoCtx::aio_operate
转调io_ctx_impl对应的函数。
int librados::IoCtx::aio_operate(const std::string& oid, AioCompletion *c,
librados::ObjectWriteOperation *o)
{
object_t obj(oid);
return io_ctx_impl->aio_operate(obj, &o->impl->o, c->pc,
io_ctx_impl->snapc, 0);
}
librados::IoCtxImpl::aio_operate
int librados::IoCtxImpl::aio_operate(const object_t& oid,
::ObjectOperation *o, AioCompletionImpl *c,
const SnapContext& snap_context, int flags,
const blkin_trace_info *trace_info)
{
FUNCTRACE(client->cct);
OID_EVENT_TRACE(oid.name.c_str(), "RADOS_WRITE_OP_BEGIN");
auto ut = ceph::real_clock::now();
/* can't write to a snapshot */
if (snap_seq != CEPH_NOSNAP)
return -EROFS;
// 将AioCompletion转换成Centext对象
// Context对象是ceph中标准的回调函数格式对象
Context *oncomplete = new C_aio_Complete(c);
#if defined(WITH_LTTNG) && defined(WITH_EVENTTRACE)
((C_aio_Complete *) oncomplete)->oid = oid;
#endif
c->io = this;
// 在IoCtxImpl中有一个队列,用于存储所有的AioCompletionImpl*
// 这个函数就是将AioCompletionImpl*放入该队列
queue_aio_write(c);
ZTracer::Trace trace;
if (trace_info) {
ZTracer::Trace parent_trace("", nullptr, trace_info);
trace.init("rados operate", &objecter->trace_endpoint, &parent_trace);
}
trace.event("init root span");
// 将ObjectOperation对象封装成Objecter::Op类型的对象,增加了对象位置相关的信息
Objecter::Op *op = objecter->prepare_mutate_op(
oid, oloc, *o, snap_context, ut, flags,
oncomplete, &c->objver, osd_reqid_t(), &trace);
// 将操作通过网络发送出去
objecter->op_submit(op, &c->tid);
trace.event("rados operate op submitted");
return 0;
}
Objecter::op_submit
void Objecter::op_submit(Op *op, ceph_tid_t *ptid, int *ctx_budget)
{
shunique_lock rl(rwlock, ceph::acquire_shared);
ceph_tid_t tid = 0;
if (!ptid)
ptid = &tid;
op->trace.event("op submit");
// 转调
_op_submit_with_budget(op, rl, ptid, ctx_budget);
}
Objecter::_op_submit_with_budget
budget意思是预算,这里涉及到ceph的Throttle机制,用于流量控制的。暂时不深入。
这里仍然没有具体逻辑。主要包含流量控制和超时处理的处理。
void Objecter::_op_submit_with_budget(Op *op, shunique_lock& sul,
ceph_tid_t *ptid,
int *ctx_budget)
{
assert(initialized);
assert(op->ops.size() == op->out_bl.size());
assert(op->ops.size() == op->out_rval.size());
assert(op->ops.size() == op->out_handler.size());
// 流量控制相关
// throttle. before we look at any state, because
// _take_op_budget() may drop our lock while it blocks.
if (!op->ctx_budgeted || (ctx_budget && (*ctx_budget == -1))) {
int op_budget = _take_op_budget(op, sul);
// take and pass out the budget for the first OP
// in the context session
if (ctx_budget && (*ctx_budget == -1)) {
*ctx_budget = op_budget;
}
}
// 如果设置了超时时间,则注册超时函数到定时器。
// 超时使,调用op_cancel取消操作
if (osd_timeout > timespan(0)) {
if (op->tid == 0)
op->tid = ++last_tid;
auto tid = op->tid;
op->ontimeout = timer.add_event(osd_timeout,
[this, tid]() {
op_cancel(tid, -ETIMEDOUT); });
}
// 转调
_op_submit(op, sul, ptid);
}
Objecter::_op_submit
这里完成osd的选择和发送操作。
void Objecter::_op_submit(Op *op, shunique_lock& sul, ceph_tid_t *ptid)
{
// rwlock is locked
ldout(cct, 10) << __func__ << " op " << op << dendl;
// pick target
assert(op->session == NULL);
OSDSession *s = NULL;
// 从pool到pg到osd,一层层定位,最后定位到一个osd
bool check_for_latest_map = _calc_target(&op->target, nullptr)
== RECALC_OP_TARGET_POOL_DNE;
// 建立到osd的连接会话
// Try to get a session, including a retry if we need to take write lock
int r = _get_session(op->target.osd, &s, sul);
if (r == -EAGAIN ||
(check_for_latest_map && sul.owns_lock_shared())) {
epoch_t orig_epoch = osdmap->get_epoch();
sul.unlock();
if (cct->_conf->objecter_debug_inject_relock_delay) {
sleep(1);
}
sul.lock();
if (orig_epoch != osdmap->get_epoch()) {
// map changed; recalculate mapping
ldout(cct, 10) << __func__ << " relock raced with osdmap, recalc target"
<< dendl;
check_for_latest_map = _calc_target(&op->target, nullptr)
== RECALC_OP_TARGET_POOL_DNE;
if (s) {
put_session(s);
s = NULL;
r = -EAGAIN;
}
}
}
if (r == -EAGAIN) {
assert(s == NULL);
r = _get_session(op->target.osd, &s, sul);
}
assert(r == 0);
assert(s); // may be homeless
// perf count
_send_op_account(op);
// send?
assert(op->target.flags & (CEPH_OSD_FLAG_READ|CEPH_OSD_FLAG_WRITE));
if (osdmap_full_try) {
op->target.flags |= CEPH_OSD_FLAG_FULL_TRY;
}
bool need_send = false;
// 根据状态判断是暂停发送还是开始发送
if (osdmap->get_epoch() < epoch_barrier) {
ldout(cct, 10) << " barrier, paused " << op << " tid " << op->tid
<< dendl;
op->target.paused = true;
_maybe_request_map();
} else if ((op->target.flags & CEPH_OSD_FLAG_WRITE) &&
osdmap->test_flag(CEPH_OSDMAP_PAUSEWR)) {
ldout(cct, 10) << " paused modify " << op << " tid " << op->tid
<< dendl;
op->target.paused = true;
_maybe_request_map();
} else if ((op->target.flags & CEPH_OSD_FLAG_READ) &&
osdmap->test_flag(CEPH_OSDMAP_PAUSERD)) {
ldout(cct, 10) << " paused read " << op << " tid " << op->tid
<< dendl;
op->target.paused = true;
_maybe_request_map();
} else if (op->respects_full() &&
(_osdmap_full_flag() ||
_osdmap_pool_full(op->target.base_oloc.pool))) {
ldout(cct, 0) << " FULL, paused modify " << op << " tid "
<< op->tid << dendl;
op->target.paused = true;
_maybe_request_map();
} else if (!s->is_homeless()) {
need_send = true;
} else {
_maybe_request_map();
}
MOSDOp *m = NULL;
if (need_send) {
// 准备请求,创建并填充数据到MOSDOp *m
m = _prepare_osd_op(op);
}
OSDSession::unique_lock sl(s->lock);
if (op->tid == 0)
op->tid = ++last_tid;
ldout(cct, 10) << "_op_submit oid " << op->target.base_oid
<< " '" << op->target.base_oloc << "' '"
<< op->target.target_oloc << "' " << op->ops << " tid "
<< op->tid << " osd." << (!s->is_homeless() ? s->osd : -1)
<< dendl;
_session_op_assign(s, op);
if (need_send) {
// 发送请求,后续调用了Messager模块的Connection::send_messager将m放入对应的发送队列
// 放入队列成功后直接返回
_send_op(op, m);
}
// Last chance to touch Op here, after giving up session lock it can
// be freed at any time by response handler.
ceph_tid_t tid = op->tid;
if (check_for_latest_map) {
_send_op_map_check(op);
}
if (ptid)
*ptid = tid;
op = NULL;
sl.unlock();
// 释放会话
put_session(s);
ldout(cct, 5) << num_in_flight << " in flight" << dendl;
}
至于回调函数的调用,则是通过Massenger的dispatch机制完成的。
librados::RadosClient::connect
connect函数完成RadosClient的初始化。其中有一步是以dispatcher注册objecter到messenger上
int librados::RadosClient::connect()
{
...
objecter->init();
messenger->add_dispatcher_head(&mgrclient);
messenger->add_dispatcher_tail(objecter);
...
}
Messenger::ms_deliver_dispatch
void ms_deliver_dispatch(Message *m) {
m->set_dispatch_stamp(ceph_clock_now());
for (list::iterator p = dispatchers.begin();
p != dispatchers.end();
++p) {
if ((*p)->ms_dispatch(m))
return;
}
lsubdout(cct, ms, 0) << "ms_deliver_dispatch: unhandled message " << m << " " << *m << " from "
<< m->get_source_inst() << dendl;
assert(!cct->_conf->ms_die_on_unhandled_msg);
m-
Objecter::ms_dispatch
bool Objecter::ms_dispatch(Message *m)
{
ldout(cct, 10) << __func__ << " " << cct << " " << *m << dendl;
switch (m->get_type()) {
// these we exlusively handle
case CEPH_MSG_OSD_OPREPLY:
handle_osd_op_reply(static_cast(m));
return true;
case CEPH_MSG_OSD_BACKOFF:
handle_osd_backoff(static_cast(m));
return true;
case CEPH_MSG_WATCH_NOTIFY:
handle_watch_notify(static_cast(m));
m->put();
return true;
case MSG_COMMAND_REPLY:
if (m->get_source().type() == CEPH_ENTITY_TYPE_OSD) {
handle_command_reply(static_cast(m));
return true;
} else {
return false;
}
case MSG_GETPOOLSTATSREPLY:
handle_get_pool_stats_reply(static_cast(m));
return true;
case CEPH_MSG_POOLOP_REPLY:
handle_pool_op_reply(static_cast(m));
return true;
case CEPH_MSG_STATFS_REPLY:
handle_fs_stats_reply(static_cast(m));
return true;
// these we give others a chance to inspect
// MDS, OSD
case CEPH_MSG_OSD_MAP:
handle_osd_map(static_cast(m));
return false;
}
return false;
}
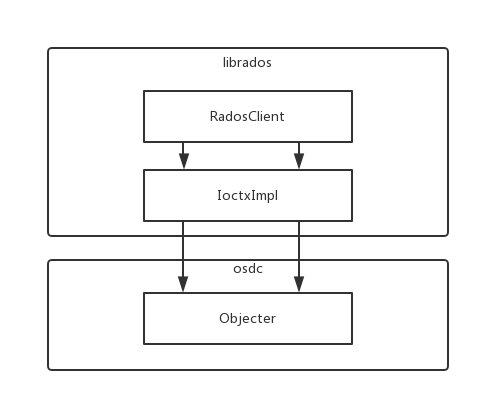
有关Objecter的补充
在librados中,RadosClient是其核心管理类,处理rados层面和pool层面的管理,并负责创建和维护Objecter等组件。IoctxImpl保存一个pool的上下文,负责单个pool的操作。osdc模块负责请求的封装和通过网络模块发送请求的工作,其核心类就是Objecter。