GPIO介绍
GPIO的一些函数说明:https://blog.csdn.net/shenghuaday/article/details/75966639
库函数GPIO中定义GPIO引脚名称,传输速率,引脚模式设置相应的结构体
@brief This file contains all the functions prototypes for the GPIO
* firmware library.
关于GPIO的函数:
void GPIO_DeInit(GPIO_TypeDef* GPIOx);
void GPIO_AFIODeInit(void);
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
void GPIO_StructInit(GPIO_InitTypeDef* GPIO_InitStruct);
uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
void GPIO_Write(GPIO_TypeDef* GPIOx, uint16_t PortVal);
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
void GPIO_EventOutputCmd(FunctionalState NewState);
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState);
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
void GPIO_ETH_MediaInterfaceConfig(uint32_t GPIO_ETH_MediaInterface);GPIO简介
GPIO是通用输入输出端口的简称,简单来说就是STM32可控制的引脚,STM32芯片的GPIO引脚与外部设备连接起来,从而实现与外部通讯、控制以及数据采集的功能。STM32芯片的GPIO被分成很多组,每组有16个引脚,如型号为STM32F4IGT6型号的芯片有GPIOA、GPIOB、GPIOC至GPIOI共9组GPIO,芯片一共176个引脚,其中GPIO就占了一大部分,所有的GPIO引脚都有基本的输入输出功能。
最基本的输出功能是由STM32控制引脚输出高、低电平,实现开关控制,如把GPIO引脚接入到LED灯,那就可以控制LED灯的亮灭,引脚接入到继电器或三极管,那就可以通过继电器或三极管控制外部大功率电路的通断。
最基本的输入功能是检测外部输入电平,如把GPIO引脚连接到按键,通过电平高低区分按键是否被按下。
7.2 GPIO框图剖析
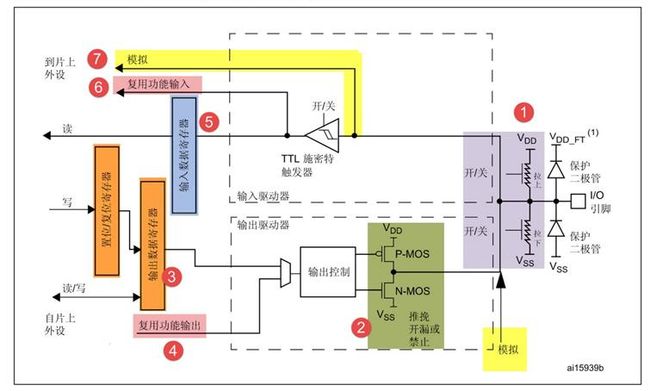
图 71 GPIO结构框图
通过GPIO硬件结构框图,就可以从整体上深入了解GPIO外设及它的各种应用模式。该图从最右端看起,最右端就是代表STM32芯片引出的GPIO引脚,其余部件都位于芯片内部。
7.2.1 基本结构分析
下面我们按图中的编号对GPIO端口的结构部件进行说明。
1. 保护二极管及上、下拉电阻
引脚的两保护个二级管可以防止引脚外部过高或过低的电压输入,当引脚电压高于VDD_FT时,上方的二极管导通,当引脚电压低于VSS时,下方的二极管导通,防止不正常电压引入芯片导致芯片烧毁。尽管有这样的保护,并不意味着STM32的引脚能直接外接大功率驱动器件,如直接驱动电机,强制驱动要么电机不转,要么导致芯片烧坏,必须要加大功率及隔离电路驱动。具体电压、电流范围可查阅《STM32F4xx规格书》。
上拉、下拉电阻,从它的结构我们可以看出,通过上、下拉对应的开关配置,我们可以控制引脚默认状态的电压,开启上拉的时候引脚电压为高电平,开启下拉的时候引脚电压为低电平,这样可以消除引脚不定状态的影响。如引脚外部没有外接器件,或者外部的器件不干扰该引脚电压时,STM32的引脚都会有这个默认状态。
也可以设置"既不上拉也不下拉模式",我们也把这种状态称为浮空模式,配置成这个模式时,直接用电压表测量其引脚电压为1点几伏,这是个不确定值。所以一般来说我们都会选择给引脚设置"上拉模式"或"下拉模式"使它有默认状态。
STM32的内部上拉是"弱上拉",即通过此上拉输出的电流是很弱的,如要求大电流还是需要外部上拉。
通过"上拉/下拉寄存器GPIOx_PUPDR"控制引脚的上、下拉以及浮空模式。
2. P-MOS管和N-MOS管
GPIO引脚线路经过上、下拉电阻结构后,向上流向"输入模式"结构,向下流向"输出模式"结构。先看输出模式部分,线路经过一个由P-MOS和N-MOS管组成的单元电路。这个结构使GPIO具有了"推挽输出"和"开漏输出"两种模式。
所谓的推挽输出模式,是根据这两个MOS管的工作方式来命名的。在该结构中输入高电平时,上方的P-MOS导通,下方的N-MOS关闭,对外输出高电平;而在该结构中输入低电平时,N-MOS管导通,P-MOS关闭,对外输出低电平。当引脚高低电平切换时,两个管子轮流导通,一个负责灌电流,一个负责拉电流,使其负载能力和开关速度都比普通的方式有很大的提高。推挽输出的低电平为0伏,高电平为3.3伏,参考图 72左侧,它是推挽输出模式时的等效电路。
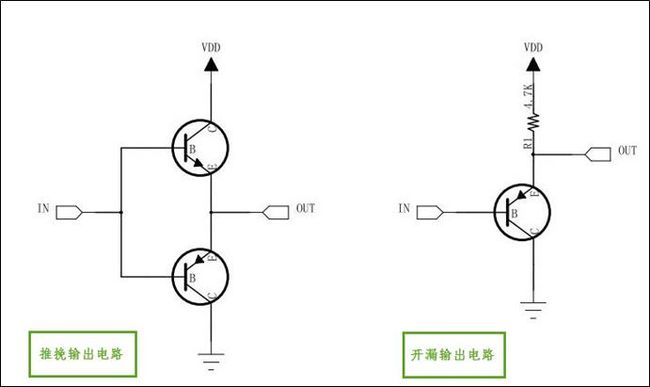
图 72 等效电路
而在开漏输出模式时,上方的P-MOS管完全不工作。如果我们控制输出为0,低电平,则P-MOS管关闭,N-MOS管导通,使输出接地,若控制输出为1 (它无法直接输出高电平)时,则P-MOS管和N-MOS管都关闭,所以引脚既不输出高电平,也不输出低电平,为高阻态。为正常使用时必须接上拉电阻(可用STM32的内部上拉,但建议在STM32外部再接一个上拉电阻),参考图 72中的右侧等效电路。它具"线与"特性,也就是说,若有很多个开漏模式引脚连接到一起时,只有当所有引脚都输出高阻态,才由上拉电阻提供高电平,此高电平的电压为外部上拉电阻所接的电源的电压。若其中一个引脚为低电平,那线路就相当于短路接地,使得整条线路都为低电平,0伏。
推挽输出模式一般应用在输出电平为0和3.3伏而且需要高速切换开关状态的场合。在STM32的应用中,除了必须用开漏模式的场合,我们都习惯使用推挽输出模式。
开漏输出一般应用在I2C、SMBUS通讯等需要"线与"功能的总线电路中。除此之外,还用在电平不匹配的场合,如需要输出5伏的高电平,就可以在外部接一个上拉电阻,上拉电源为5伏,并且把GPIO设置为开漏模式,当输出高阻态时,由上拉电阻和电源向外输出5伏的电平。
通过"输出类型寄存器GPIOx_OTYPER"可以控制GPIO端口是推挽模式还是开漏模式。
3. 输出数据寄存器
前面提到的双MOS管结构电路的输入信号,是由GPIO"输出数据寄存器GPIOx_ODR"提供的,因此我们通过修改输出数据寄存器的值就可以修改GPIO引脚的输出电平。而"置位/复位寄存器GPIOx_BSRR"可以通过修改输出数据寄存器的值从而影响电路的输出。
4. 复用功能输出
"复用功能输出"中的"复用"是指STM32的其它片上外设对GPIO引脚进行控制,此时GPIO引脚用作该外设功能的一部分,算是第二用途。从其它外设引出来的"复用功能输出信号"与GPIO本身的数据据寄存器都连接到双MOS管结构的输入中,通过图中的梯形结构作为开关切换选择。
例如我们使用USART串口通讯时,需要用到某个GPIO引脚作为通讯发送引脚,这个时候就可以把该GPIO引脚配置成USART串口复用功能,由串口外设控制该引脚,发送数据。
5. 输入数据寄存器
看GPIO结构框图的上半部分,它是GPIO引脚经过上、下拉电阻后引入的,它连接到施密特触发器,信号经过触发器后,模拟信号转化为0、1的数字信号,然后存储在"输入数据寄存器GPIOx_IDR"中,通过读取该寄存器就可以了解GPIO引脚的电平状态。
6. 复用功能输入
与"复用功能输出"模式类似,在"复用功能输出模式"时,GPIO引脚的信号传输到STM32其它片上外设,由该外设读取引脚状态。
同样,如我们使用USART串口通讯时,需要用到某个GPIO引脚作为通讯接收引脚,这个时候就可以把该GPIO引脚配置成USART串口复用功能,使USART可以通过该通讯引脚的接收远端数据。
7. 模拟输入输出
当GPIO引脚用于ADC采集电压的输入通道时,用作"模拟输入"功能,此时信号是不经过施密特触发器的,因为经过施密特触发器后信号只有0、1两种状态,所以ADC外设要采集到原始的模拟信号,信号源输入必须在施密特触发器之前。类似地,当GPIO引脚用于DAC作为模拟电压输出通道时,此时作为"模拟输出"功能,DAC的模拟信号输出就不经过双MOS管结构了,在GPIO结构框图的右下角处,模拟信号直接输出到引脚。同时,当GPIO用于模拟功能时(包括输入输出),引脚的上、下拉电阻是不起作用的,这个时候即使在寄存器配置了上拉或下拉模式,也不会影响到模拟信号的输入输出。
7.2.2 GPIO工作模式
总结一下,由GPIO的结构决定了GPIO可以配置成以下模式:
1. 输入模式(上拉/下拉/浮空)
在输入模式时,施密特触发器打开,输出被禁止。数据寄存器每隔1个AHB1时钟周期更新一次,可通过输入数据寄存器GPIOx_IDR读取I/O状态。其中AHB1的时钟如按默认配置一般为180MHz。
用于输入模式时,可设置为上拉、下拉或浮空模式。
2. 输出模式(推挽/开漏,上拉/下拉)
在输出模式中,输出使能,推挽模式时双MOS管以方式工作,输出数据寄存器GPIOx_ODR可控制I/O输出高低电平。开漏模式时,只有N-MOS管工作,输出数据寄存器可控制I/O输出高阻态或低电平。输出速度可配置,有2MHz\25MHz\50MHz\100MHz的选项。此处的输出速度即I/O支持的高低电平状态最高切换频率,支持的频率越高,功耗越大,如果功耗要求不严格,把速度设置成最大即可。
此时施密特触发器是打开的,即输入可用,通过输入数据寄存器GPIOx_IDR可读取I/O的实际状态。
用于输出模式时,可使用上拉、下拉模式或浮空模式。但此时由于输出模式时引脚电平会受到ODR寄存器影响,而ODR寄存器对应引脚的位为0,即引脚初始化后默认输出低电平,所以在这种情况下,上拉只起到小幅提高输出电流能力,但不会影响引脚的默认状态。
3. 复用功能(推挽/开漏,上拉/下拉)
复用功能模式中,输出使能,输出速度可配置,可工作在开漏及推挽模式,但是输出信号源于其它外设,输出数据寄存器GPIOx_ODR无效;输入可用,通过输入数据寄存器可获取I/O实际状态,但一般直接用外设的寄存器来获取该数据信号。
用于复用功能时,可使用上拉、下拉模式或浮空模式。同输出模式,在这种情况下,初始化后引脚默认输出低电平,上拉只起到小幅提高输出电流能力,但不会影响引脚的默认状态。
4. 模拟输入输出
模拟输入输出模式中,双MOS管结构被关闭,施密特触发器停用,上/下拉也被禁止。其它外设通过模拟通道进行输入输出。
通过对GPIO寄存器写入不同的参数,就可以改变GPIO的应用模式,再强调一下,要了解具体寄存器时一定要查阅《STM32F4xx参考手册》中对应外设的寄存器说明。在GPIO外设中,通过设置"模式寄存器GPIOx_MODER"可配置GPIO的输入/输出/复用/模拟模式,"输出类型寄存器GPIOx_OTYPER"配置推挽/开漏模式,配置"输出速度寄存器GPIOx_OSPEEDR"可选2/25/50/100MHz输出速度,"上/下拉寄存器GPIOx_PUPDR"可配置上拉/下拉/浮空模式,各寄存器的具体参数值见表 71。
表 71 GPIO寄存器的参数配置
| 模式寄存器的MODER位[0:1] |
输出类型寄存器的OTYPER位 |
输出速度寄存器的OSPEEDR |
上/下拉寄存器的PUPDR位[0:1] |
| 01 -输出模式 |
0 -推挽模式 |
00 -速度2MHz |
00 -无上拉无下拉 |
| 10 -复用模式 |
|||
| 00 -输入模式 |
不可用 |
不可用 |
|
| 11 -模拟功能 |
不可用 |
不可用 |
00 -无上拉无下拉 |
在STM32中,根据“葵花宝典”中第STM32篇参考手册中,GPIO有以下几种模式:

1 typedef enum
2 { GPIO_Mode_AIN = 0x0, //模拟输入
3 GPIO_Mode_IN_FLOATING = 0x04, //浮空输入
4 GPIO_Mode_IPD = 0x28, //下拉输入
5 GPIO_Mode_IPU = 0x48, //上拉输入
6 GPIO_Mode_Out_OD = 0x14, //开漏输出
7 GPIO_Mode_Out_PP = 0x10, //推挽输出
8 GPIO_Mode_AF_OD = 0x1C, //开漏复用功能
9 GPIO_Mode_AF_PP = 0x18 //推挽复用功能
10 }GPIOMode_TypeDef;一、STM公司对于该文件的简述
现在能够看到的关于GPIO操作的库函数是V1.8.0,可以在STM官方库支持中下载,文档的综述表明其功能是管理GPIO的外设功能,总共是三点:1.初始化;2.读写;3.复用。
二、文件中函数的使用
整个文件中包含14个函数,其中初始化与配置4个函数;读写操作9个;复用1个。
初始化函数:
GPIO_DeInit() 表示将取消初始化,恢复为其默认复位值。默认引脚悬空(除JTAG)。
GPIO_Init() 根据初始化结构体来自定义初始化引脚。例如下面的PA0引脚作为输入功能的初始化,在主函数中循环前使用,即可完成初始化的工作。
-
void demo(void) -
{ -
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体 -
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能A端口引脚 -
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; //输入模式 -
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽模式 -
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //不上拉不下拉 -
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO速度 -
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //初始化的引脚为PA0 -
GPIO_Init(GPIOA, &GPIO_InitStructure); -
}
GPIO_StructInit() 根据默认模式初始化引脚。
-
GPIO_InitStruct->GPIO_Pin = GPIO_Pin_All; -
GPIO_InitStruct->GPIO_Mode = GPIO_Mode_IN; -
GPIO_InitStruct->GPIO_Speed = GPIO_Speed_2MHz; -
GPIO_InitStruct->GPIO_OType = GPIO_OType_PP; -
GPIO_InitStruct->GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_PinLockConfig() 锁定寄存器GPIOx_MODER, GPIOx_OTYPER, GPIOx_OSPEEDR,GPIOx_PUPDR, GPIOx_AFRL and GPIOx_AFRH,可使用复位操作来解除锁定。
读写操作:
加了bit的函数,需要选定端口和具体引脚,未加的函数只是选定了端口
GPIO_ReadInputDataBit()/ GPIO_ReadInputData() 获得在输入模式下配置的引脚电平。
GPIO_ReadOnputDataBit()/ GPIO_ReadOnputData() 获得在输出模式下配置的引脚电平。
GPIO_SetBits()/ GPIO_ResetBits() 设置/复位在输出模式下使用的引脚电平。
GPIO_Write()/ GPIO_WriteBit() 将数据写入指定的GPIO数据端口。
GPIO_ToggleBits() 切换指定的GPIO引脚使用的引脚电平,即是1变0,0变1。
复用函数:
GPIO_PinAFConfig() 为单个引脚提供复用的函数。
三、h文件中的基地址定义等
头文件中总共包含声明:对于C语言库的支持,初始化结构体的各项配置,相应开发板上的引脚基地址,上一节中的14个函数。
下面根据头文件的声明,枚举一下各种模式的初始化配置:
GPIO_Mode_IN/OUT/AF/AN; 分别为输入/输出/复用/模拟模式的配置。模拟主要面向ADC/DAC
GPIO_OType_PP/OD; 分别为推挽/开漏的配置,区别:引脚输出高电平/不输出电压。
GPIO_Low_Speed/Medium/Fast/High; 速度分别为2/25/50/100MHz,也可以自定义IO速度。
GPIO_PuPd_NOPULL/UP/DOWN; 不上拉不下拉,上拉,下拉。
-
typedef struct -
{ -
uint32_t GPIO_Pin; -
GPIOMode_TypeDef GPIO_Mode; -
GPIOSpeed_TypeDef GPIO_Speed; -
GPIOOType_TypeDef GPIO_OType; -
GPIOPuPd_TypeDef GPIO_PuPd; -
}GPIO_InitTypeDef;
从上面的结构体可以看出我们需要这样来初始化GPIO,1.引脚,根据GPIO_pins_define的宏还找引脚;2.工作模式;3.引脚速度;4.引脚的输出类型;5.上拉下拉设置。
四、使用例子
最后实现的功能是,在按键之后一直每行打印1。
-
void InitKey(void) -
{ -
GPIO_InitTypeDef GPIO_InitStructure; -
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); //使能A引脚 -
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN; //输入模式 -
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽模式 -
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //不上拉不下拉 -
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO速度 -
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //按键为PA0所扯出 -
GPIO_Init(GPIOA, &GPIO_InitStructure); -
} -
//按键函数 -
uint8_t GetKey(GPIO_TypeDef* GPIOx,uint16_t GPIO_Pin){ -
if(1 == GPIO_ReadInputDataBit(GPIOx,GPIO_Pin)){ -
if(1 == GPIO_ReadInputDataBit(GPIOx,GPIO_Pin)); -
return 1; -
}else return 0; -
} -
int main(void){ -
int a; -
InitKey(); -
while(1){ -
if (1 == GetKey(GPIOA,GPIO_Pin_0)){ -
a=1; -
} -
printf("%d\r\n",a); -
} -
}