【OpenCV 笔记】金字塔光流法追踪运动目标
原理部分见https://blog.csdn.net/zouxy09/article/details/8683859
环境:OpenCV3.3+VS2017
光流简言之就是像素在某时刻运动的瞬时速度,利用这个瞬时速度可以估计到上一帧该像素点在下一帧的对应位置。
在上面链接中有五种计算光流的方法,其中金字塔光流法来自论文:”Pyramidal Implementation of the Lucas Kanade Feature TrackerDescription of the algorithm”,该论文详细论述了金字塔光流法的原理、数学推导以及伪代码实现,对于理解金字塔光流法有很大的帮助。
在OpenCV3.3中,金字塔光流法被封装为calcOpticalFlowPyrLK的函数
void calcOpticalFlowPyrLK( InputArray prevImg, InputArray nextImg,
InputArray prevPts, InputOutputArray nextPts,
OutputArray status, OutputArray err,
Size winSize = Size(21,21), int maxLevel = 3,
TermCriteria criteria = TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 0.01),
int flags = 0, double minEigThreshold = 1e-4 );prevImg,nextImg是相邻两帧的图像;
prevPts是前一帧图像中需要做匹配的点集的坐标,即需要跟踪的点,nextPts存放在下一帧中找到的匹配点的坐标;
status用来标志每一个光流是否成功找到,且内部元素只能为uchar型,err用来记录误差;
winSize为金字塔每层的搜索框大小,面积越大结果越精确,但是消耗时间也会增加,maxLevel为金字塔层数,按照论文中的论述,金字塔3-4层足矣,这里默认为3,算上初始层实际上是4层,一般不需要变动;
criteria是迭代结束的条件,如果需要改变,自己声明一个TermCriteria对象设置好类型、迭代次数和期望精度然后传入即可;
flags和minEigThreshold分别涉及到误差测量和滤除坏点,一般不用改变。
以下是本人练习使用OpenCV进行运动跟踪时写的C++代码,供读者借鉴,本人编程菜鸟,代码写的有点乱,望见谅。
#include "stdafx.h"
#include "opencv2/video/tracking.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/videoio.hpp"
#include "opencv2/highgui.hpp"
#include
#include
using namespace cv;
using namespace std;
#define WINDOW_CAP "运动捕捉"
#define WINDOW_PARAM "参数调整"
Mat curFrame;
Mat curGrayFrame, prevGrayFrame;//将图像转换为灰度图再进行处理
Mat ROIFrame, newFrame;//newFrame和形成拖拽矩形相关,ROIFrame用来对感兴趣区域进行处理
vector status;
vector err;
/*以下为滚动条事件所需的变量*/
int nTrackLevel = 1;//设置两帧之间点的移动距离大于一定数值才会被做绿色标记
int nPlay = 0;//是否播放
int nPyrLevel = 3;//金字塔层数
int nWinSize = 21;//金字塔光流搜索窗大小
enum DIRECTION {
KEEP = 0,
OTHER_DIRECTIONS = 1
};
float getDistance(Point pointO, Point pointA);
void drawLine(Mat img, Point SourceP, Point TargetP, DIRECTION type);
DIRECTION getDirection(Point SourceP, Point TargetP);
/*以下5行声明的是和绘制矩形框相关*/
Rect g_rectangle;
bool g_bDrawingBox = false;
bool g_bDrawFinished = false;
void on_MouseHandle(int event, int x, int y, int flags, void* param);
void DrawRectangle(Mat& img, Rect box);
int main()
{
VideoCapture cap;
cap.open("剪辑视频-敦刻尔克.avi");
if (!cap.isOpened())
{
cout << "图像读取失败";
return false;
}
namedWindow(WINDOW_CAP);
namedWindow(WINDOW_PARAM);
createTrackbar("捕捉敏感度", WINDOW_PARAM, &nTrackLevel, 15);
createTrackbar("暂停/继续", WINDOW_CAP, &nPlay, 1);
createTrackbar("金字塔层数", WINDOW_PARAM, &nPyrLevel, 3);
createTrackbar("搜索窗大小", WINDOW_PARAM, &nWinSize, 30);
setMouseCallback(WINDOW_CAP, on_MouseHandle, (void*)&newFrame);
cap >> curFrame;
imshow(WINDOW_CAP, curFrame);
while (!curFrame.empty())
{
curFrame.copyTo(newFrame);
DrawRectangle(newFrame, g_rectangle);
if (g_bDrawFinished)
{
ROIFrame = curFrame(Rect(g_rectangle.x, g_rectangle.y,
g_rectangle.width, g_rectangle.height));
}
if (nPlay)
{
cap >> curFrame;
if (curFrame.empty())
return false;
vector points[2];
/*如果对每个像素都进行操作,处理一帧都相当耗时间,因此每隔10像素取一次*/
for (int i = 0; i < curFrame.cols; i += 10)
for (int j = 0; j < curFrame.rows; j += 10)
{
points[0].push_back(Point(i, j));
}
cvtColor(curFrame, curGrayFrame, COLOR_BGR2GRAY);
if (!prevGrayFrame.empty())
{
/*使用GPU处理稀疏光流得到位置点矩阵,绘制标记操作扔在CPU中进行*/
/*程序运行时很明显感受到初始化gpu花费了大约半秒时间*/
UMat UprevGrayFrame, UcurGrayFrame;
prevGrayFrame.getUMat(ACCESS_READ).copyTo(UprevGrayFrame);
curGrayFrame.getUMat(ACCESS_READ).copyTo(UcurGrayFrame);
calcOpticalFlowPyrLK(UprevGrayFrame, UcurGrayFrame,
points[0], points[1], status, err, Size(nWinSize, nWinSize), nPyrLevel);
for (int i = 0; i < points[1].size(); i++)
{
int distance = getDistance(points[0][i], points[1][i]);
/*相邻帧必定为小范围移动,<10可以过滤干扰*/
/*大范围的干扰不知道从何而来*/
if (distance>= nTrackLevel&&distance<10)
{
DIRECTION dir = getDirection(points[0][i], points[1][i]);
/*
位置是相对于ROI区域来说的,但是
得到的坐标是在curFrame整幅图象中
的坐标,因此必须减掉矩形框的起始
得到相对值
*/
points[0][i].y -= g_rectangle.y;
points[0][i].x -= g_rectangle.x;
points[1][i].y -= g_rectangle.y;
points[1][i].x -= g_rectangle.x;
drawLine(ROIFrame, points[0][i], points[1][i], dir);
}
}
}
curGrayFrame.copyTo(prevGrayFrame);
}
imshow(WINDOW_CAP, newFrame);
waitKey(42);
}
waitKey();
}
void drawLine(Mat img, Point SourceP, Point TargetP, DIRECTION type)
{
switch (type)
{
case OTHER_DIRECTIONS:
line(img, SourceP, TargetP, Scalar(0, 255, 0), 2);
break;
/*KEEP此处没用*/
case KEEP:
circle(img, SourceP, 2, Scalar(0, 255, 0), -1, 8);
break;
default:
break;
}
}
float getDistance(Point pointO, Point pointA)
{
float distance;
distance = powf((pointO.x - pointA.x), 2) + powf((pointO.y - pointA.y), 2);
distance = sqrtf(distance);
return distance;
}
DIRECTION getDirection(Point SourceP, Point TargetP)
{
if (SourceP.x == TargetP.x&&SourceP.y == TargetP.y)
return DIRECTION::KEEP;
return DIRECTION::OTHER_DIRECTIONS;
}
void on_MouseHandle(int event, int x, int y, int flags, void* param)
{
Mat& image = *(Mat*)param;
switch (event)
{
case EVENT_MOUSEMOVE:
{
if (g_bDrawingBox)
{
g_rectangle.width = x - g_rectangle.x;
g_rectangle.height = y - g_rectangle.y;
}
}
break;
case EVENT_LBUTTONDOWN:
{
g_bDrawFinished = false;
g_bDrawingBox = true;
g_rectangle = Rect(x, y, 0, 0);
}
break;
case EVENT_LBUTTONUP:
{
g_bDrawingBox = false;
g_bDrawFinished = true;
if (g_rectangle.width < 0)
{
g_rectangle.x += g_rectangle.width;
g_rectangle.width *= -1;
}
if (g_rectangle.height < 0)
{
g_rectangle.y += g_rectangle.height;
g_rectangle.height *= -1;
}
DrawRectangle(image, g_rectangle);
}
break;
}
}
void DrawRectangle(Mat& img, Rect box)
{
rectangle(img, box.tl(), box.br(), Scalar(225,
105, 65), 2);
} 以下是效果图:视频中间走动的士兵成功地识别出来并且做了标记,由于镜头有远近拉伸,故天空和栏杆也有运动标记。
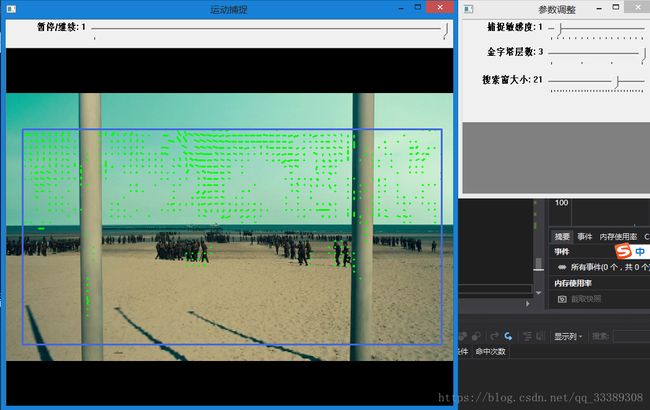
本人起初使用CPU计算光流卡顿明显,一秒处理5-6帧,经过百度发现OpenCV3的GPU计算非常方便,只需要将Mat声明为UMat程序会自动进行GPU运算,Mat和UMat的转换也是相当方便,改用GPU进行光流计算后速度提升显著,同样的参数下能够达到一秒处理30帧以上。