VAE异常检测论文复现——Anomaly Detection for Skin Disease Images Using Variational Autoencoder
VAE异常检测论文复现——Anomaly Detection for Skin Disease Images Using Variational Autoencoder
- 数据集下载
- 数据集预处理及数据集调用
- 深度学习网络结构
- Loss函数的选择
- 实验结果
今天内容是复现论文Anomaly Detection for Skin Disease Images Using Variational Autoencoder当中的实验,因为目前还没有连接到实验室的服务器,我的实验的训练次数只有3次,所以复现的效果可能相对来说要差一些。这一次所面对的数据集是图像数据集,所以主要针对图像数据集的一些操作和处理,以及对于图像数据集其网络结构如何建立做一点总结。
数据集下载
论文所使用的数据集是ISIC2018年比赛用的一个数据集,我是在网址https://challenge.kitware.com/#phase/5abcbc6f56357d0139260e66处下载的相关数据,数据需要注册一个邮箱,然后可以下载training data(包括10015张图片),以及一个csv文件,里面标注了每一张图片的真实分类。
数据集预处理及数据集调用
在下载好了数据集和标签文档之后,先行做了一些预处理工作,将下载的图片(共7类)分别根据他们的标签存入了7个文件夹当中,这样在调用的时候采用以下的一些代码,就可以获取他们的图片数据和图片分类
from torchvision import transforms, datasets
def load_dataset(input_size, data_path, batch_size):#用来载入数据
normalize = transforms.Normalize(
mean=[0.5, 0.5, 0.5],
std=[0.5, 0.5, 0.5])
transform = transforms.Compose([
transforms.Resize((input_size, input_size)),
transforms.ToTensor(),
normalize,
])
train_dataset = datasets.ImageFolder(data_path, transform)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=batch_size,shuffle=True)
return train_loader
train_loader = load_dataset(input_size=image_size,data_path=data_path,batch_size=batch_size)
for idx, (image, target) in tqdm(enumerate(traint_loader)):
上述是调用的几句比较核心的语句,首先是在整理数据集的时候,要对其进行transform和normalize,其次是导入的时候的地址应该是7类图片所属文件夹的父文件夹。每一张图片的数据和所属标签可通过遍历的方式,从train_loader当中获得。
深度学习网络结构
Encoding层结构(相对来说在处理图片的时候encoding层的结构是比较复杂的。之前我们处理的主要都是如KDD99这样的文本数据比较多)
ngf = 64
nz = 300
nc = 3
n = math.log2(imageSize)
self.encoder = nn.Sequential()
self.encoder.add_module('input-conv', nn.Conv2d(nc, ngf, 4, 2, 1,
bias=True))
self.encoder.add_module('input-relu', nn.ReLU(inplace=True))
for i in range(n - 3):
# state size. (ngf) x 32 x 32
self.encoder.add_module('pyramid_{0}-{1}_conv'.format(ngf * 2 ** i, ngf * 2 ** (i + 1)),
nn.Conv2d(ngf * 2 ** (i), ngf * 2 ** (i + 1), 4, 2, 1, bias=True))
self.encoder.add_module('pyramid_{0}_batchnorm'.format(ngf * 2 ** (i + 1)),
nn.BatchNorm2d(ngf * 2 ** (i + 1)))
self.encoder.add_module('pyramid_{0}_relu'.format(ngf * 2 ** (i + 1)), nn.ReLU(inplace=True))
通过打印模型当中的数值,我们可以看出网络的每一层情况都如下:

这里的参数kernel_size是卷积核,stride是步长,padding代表卷积操作是否使图像的大小改变。BatchNorm2d是一个归一化函数,对每个通道进行数据的归一化,最后通过ReLU之后输出到下一个网络层。
self.decoder = nn.Sequential()
# input is Z, going into a convolution
self.decoder.add_module('input-conv', nn.ConvTranspose2d(nz, ngf * 2 ** (n - 3), 4, 1, 0, bias=True))
self.decoder.add_module('input-batchnorm', nn.BatchNorm2d(ngf * 2 ** (n - 3)))
self.decoder.add_module('input-relu', nn.ReLU(inplace=True))
# state size. (ngf * 2**(n-3)) x 4 x 4
for i in range(n - 3, 0, -1):
self.decoder.add_module('pyramid_{0}-{1}_conv'.format(ngf * 2 ** i, ngf * 2 ** (i - 1)),
nn.ConvTranspose2d(
ngf * 2 ** i, ngf * 2 ** (i - 1),
4, 2, 1, bias=True))
self.decoder.add_module('pyramid_{0}_batchnorm'.format(ngf * 2 ** (i - 1)),
nn.BatchNorm2d(ngf * 2 ** (i - 1)))
self.decoder.add_module('pyramid_{0}_relu'.format(ngf * 2 ** (i - 1)), nn.ReLU(inplace=True))
self.decoder.add_module('ouput-conv', nn.ConvTranspose2d(ngf, nc, 4, 2,
1, bias=True))
self.decoder.add_module('output-tanh', nn.Tanh())
Decoder层和Encoder层差不多,重点是关于 μ \mu μ和 σ \sigma σ的选择:
self.conv_mu = nn.Conv2d(ngf * 2 ** (n - 3), nz, 4)
self.conv_logvar = nn.Conv2d(ngf * 2 ** (n - 3), nz, 4)
def encode(self, input):
output = self.encoder(input)
output = output.squeeze(-1).squeeze(-1)
return [self.conv_mu(output), self.conv_logvar(output)]
def reparameterize(self, mu, logvar):
std = torch.exp(0.5 * logvar)
eps = torch.randn_like(std)
return eps.mul(std).add_(mu)
def decode(self, z):
return self.decoder(z)
def forward(self, x):
mu, logvar = self.encode(x)
z = self.reparameterize(mu, logvar)
return self.decode(z), \
mu.squeeze(-1).squeeze(-1), \
logvar.squeeze(-1).squeeze(-1)
Loss函数的选择
关于标准VAE做法的loss函数的选择已经比较熟悉了,这里重点讲一下作者提到的一种叫做iWAE的算法,这种算法是源于论文Importance Weighted Autoencoders,其算法的核心是选择了k个 z i z_i zi,算了其加权平均之后的值作为结果。这里我们的相应代码如下:
def _log_mean_exp(x, dim):
m, _ = torch.max(x, dim=dim, keepdim=True)
x0 = x - m
m = m.squeeze(dim)
return m + torch.log(torch.mean(torch.exp(x0),
dim=dim))
def get_iwae_score(vae, image, L=5):
image_batch = image.expand(L,
image.size(1),
image.size(2),
image.size(3))
mu, logvar = vae.encode(image_batch)
eps = torch.randn_like(mu)
z = mu + eps * torch.exp(0.5 * logvar)
kl_weight = criterion.kl_weight
reconst = vae.decode(z)
log_p_x_z = -torch.sum((reconst - image_batch).pow(2).reshape(L, -1),
dim=1)
log_p_z = -torch.sum(z.pow(2).reshape(L, -1), dim=1)
log_q_z = -torch.sum(eps.pow(2).reshape(L, -1), dim=1)
iwae_score = -_log_mean_exp(log_p_x_z + (log_p_z - log_q_z)*kl_weight, dim=0)
iwae_KL_score = -_log_mean_exp(log_p_z - log_q_z, dim=0)
iwae_reconst_score = -_log_mean_exp(log_p_x_z, dim=0)
return iwae_score, iwae_KL_score, iwae_reconst_score
class VAELoss(nn.Module):
def __init__(self, size_average=False, kl_weight=1):
super(VAELoss, self).__init__()
self.size_average = size_average
self.kl_weight = kl_weight
def forward(self, recon_x, x, mu, logvar):
bsz = x.shape[0]
reconst_err = (x - recon_x).pow(2).reshape(bsz, -1)
reconst_err = 0.5 * torch.sum(reconst_err, dim=-1)
# KL(q || p) = -log_sigma + sigma^2/2 + mu^2/2 - 1/2
KL = (-logvar + logvar.exp() + mu.pow(2) - 1) * 0.5
KL = torch.sum(KL, dim=-1)
if self.size_average:
KL = torch.mean(KL)
reconst_err = torch.mean(reconst_err)
else:
KL = torch.sum(KL)
reconst_err = torch.sum(reconst_err)
loss = reconst_err + self.kl_weight * KL
return loss, {'KL': KL, 'reconst_logp': -reconst_err}
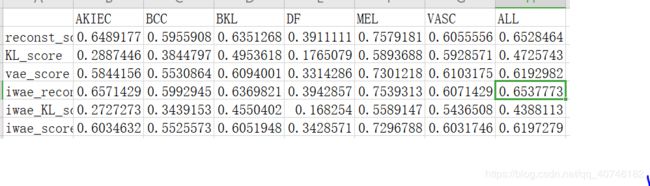
实验结果
因为整体训练只进行了三次,结果可能没有论文结果那么好,另外和论文取样也有一定的不同,很难做出完整的一样的结果。最终实验结果如下: