很久没有写博客了,最近在学习计算机视觉的相关知识,于是写了一个AR的小Demo。
该程序通过OpenCV实现对Marker的识别和定位,然后通过OpenGL将虚拟物体叠加到摄像头图像下,实现增强现实。首先来看看我们使用的Marker:
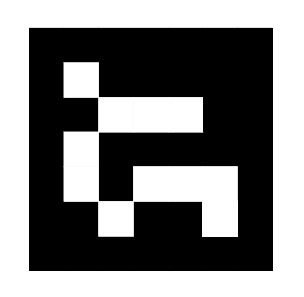
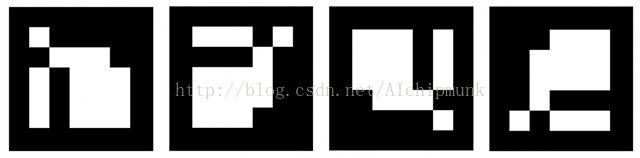
这是众多Marker中的一个,它们都被一圈的黑色边框所包围,边框之中是编码信息,白色代表1,黑色代表0。将每一行作为一个字,那么每个字有5bits。其中,1、3、5位为校验位,2、4位为信息位。也就是说,整个Marker的信息位只有10bits,所以最多可表示1024个数(0~1023)。这种编码方式实际上是汉明码的变种,唯一区别在于它的首位是对应汉明码首位的反(比如汉明码是00000,那么Marker中的编码为10000)。这么做的目的是防止某一行全黑,从而提高识别率。汉明码还有另一大优势——不具有旋转对称性,因此程序能通过汉明码确定Marker的方向,因此从Marker中解码的信息是唯一的。
一、Marker的检测与识别
我们首先实现一个类,用于检测图像中的Marker,解码信息,并计算Marker相对于摄像头的坐标位置。
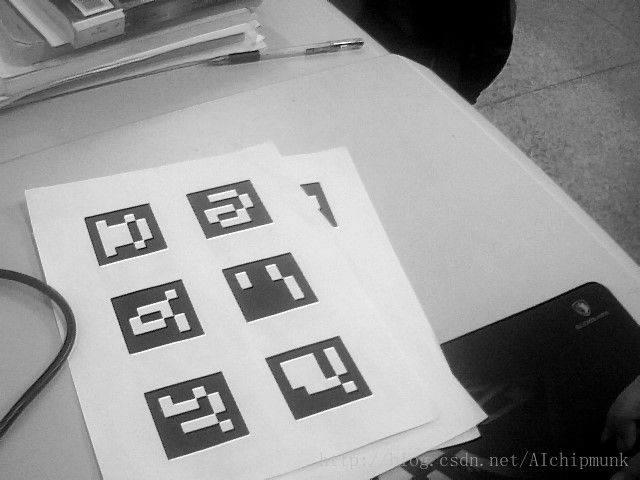
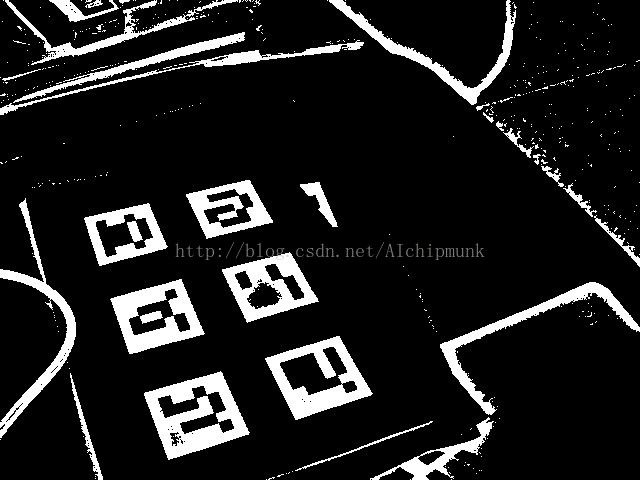
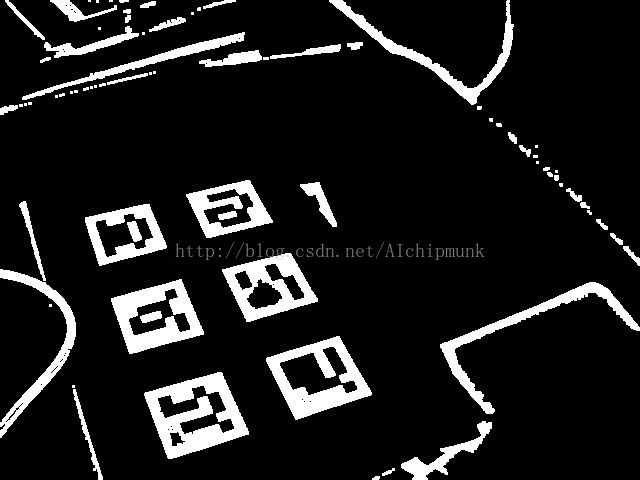
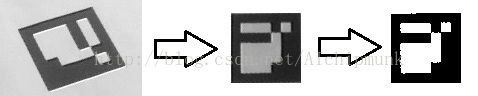
检测部分比较简单。首先将输入图像进行灰度变换,然后对灰度图像进行自适应二值化。之所以使用自适应二值化,是因为它能更好的适应光照的变化。但有一点要注意,很多朋友使用自适应二值化后表示得到的结果很像边缘检测的结果,那是因为自适应窗口过小造成的。使用自适应二值化时,窗口的大小应大于二值化目标的大小,否则得到的阈值不具有适应性。在自适应二值化之后,为了消除噪音或小块,可以加以形态学开运算。以上几部可分别得到下列图像(其中二值化的结果经过了反色处理,方便以后的轮廓提取)。
得到二值图像后,就可以使用OpenCV中的findContours来提取轮廓了。一副二值图像当中的轮廓有很多,其中有一些轮廓很小,我们通过一个阈值将这些过小的轮廓排除。排除过小轮廓后,就可以对轮廓进行多边形近似了。由于我们的Marker是正方形,其多边形近似结果应该满足以下条件:
1、只有4个顶点
2、一定是凸多边形
3、每一个边的长度不能过小
通过以上几个条件,我们可以排除绝大部分轮廓,从而找到最有可能为Marker的部分。找到这样的候选轮廓后,我们将它的多边形四个顶点保存下来,并做适当的调整,使所有顶点逆时针排序。代码如下:
- void MarkerRecognizer::markerDetect(Mat& img_gray, vector& possible_markers, int min_size, int min_side_length)
- {
- Mat img_bin;
-
- int thresh_size = (min_size/4)*2 + 1;
- adaptiveThreshold(img_gray, img_bin, 255, ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY_INV, thresh_size, thresh_size/3);
-
- morphologyEx(img_bin, img_bin, MORPH_OPEN, Mat());
-
- vector> all_contours;
- vector> contours;
- findContours(img_bin, all_contours, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
-
- for (int i = 0; i < all_contours.size(); ++i)
- {
- if (all_contours[i].size() > min_size)
- {
- contours.push_back(all_contours[i]);
- }
- }
-
- vector approx_poly;
- for (int i = 0; i < contours.size(); ++i)
- {
- double eps = contours[i].size()*APPROX_POLY_EPS;
- approxPolyDP(contours[i], approx_poly, eps, true);
-
- if (approx_poly.size() != 4)
- continue;
-
- if (!isContourConvex(approx_poly))
- continue;
-
-
- float min_side = FLT_MAX;
- for (int j = 0; j < 4; ++j)
- {
- Point side = approx_poly[j] - approx_poly[(j+1)%4];
- min_side = min(min_size, side.dot(side));
- }
- if (min_side < min_side_length*min_side_length)
- continue;
-
-
- Marker marker = Marker(0, approx_poly[0], approx_poly[1], approx_poly[2], approx_poly[3]);
- Point2f v1 = marker.m_corners[1] - marker.m_corners[0];
- Point2f v2 = marker.m_corners[2] - marker.m_corners[0];
- if (v1.cross(v2) > 0)
- {
- swap(marker.m_corners[1], marker.m_corners[3]);
- }
- possible_markers.push_back(marker);
- }
- }
下一步,从这些候选区域中进一步筛选出真正的Marker。首先,由于摄像机视角的关系,图像中的Marker是经过透视变换的。为了方便提取Marker中的信息,要使用warpPerspective方法对候选区域进行透视变换,得到Marker的正视图。之后,由于Marker只有黑白两种颜色,其直方图分布是双峰的,所以用大津法(OTSU)对透视变换后的图像做二值化。
由于Marker都有一圈黑色的轮廓,这成为了我们进一步判定Marker的标准。获取正确的Marker图像后,可能有4个不同方向。这时我们就可以通过Marker中的汉明码确定Marker的正确朝向了,正确朝向的Marker,其汉明距离一定为零。得到Marker的朝向后,就可以提取Marker的信息(即ID),还可以调整Marker的4个顶点顺序,使其不随视角的变换而变换。在Demo中,我将正向放置的Marker的左上角作为1号顶点,逆时针旋转依次为2号、3号和4号。
代码如下:
- void MarkerRecognizer::markerRecognize(cv::Mat& img_gray, vector& possible_markers, vector& final_markers)
- {
- final_markers.clear();
-
- Mat marker_image;
- Mat bit_matrix(5, 5, CV_8UC1);
- for (int i = 0; i < possible_markers.size(); ++i)
- {
- Mat M = getPerspectiveTransform(possible_markers[i].m_corners, m_marker_coords);
- warpPerspective(img_gray, marker_image, M, Size(MARKER_SIZE, MARKER_SIZE));
- threshold(marker_image, marker_image, 125, 255, THRESH_BINARY|THRESH_OTSU);
-
-
- for (int y = 0; y < 7; ++y)
- {
- int inc = (y == 0 || y == 6) ? 1 : 6;
- int cell_y = y*MARKER_CELL_SIZE;
-
- for (int x = 0; x < 7; x += inc)
- {
- int cell_x = x*MARKER_CELL_SIZE;
- int none_zero_count = countNonZero(marker_image(Rect(cell_x, cell_y, MARKER_CELL_SIZE, MARKER_CELL_SIZE)));
- if (none_zero_count > MARKER_CELL_SIZE*MARKER_CELL_SIZE/4)
- goto __wrongMarker;
- }
- }
-
-
- for (int y = 0; y < 5; ++y)
- {
- int cell_y = (y+1)*MARKER_CELL_SIZE;
-
- for (int x = 0; x < 5; ++x)
- {
- int cell_x = (x+1)*MARKER_CELL_SIZE;
- int none_zero_count = countNonZero(marker_image(Rect(cell_x, cell_y, MARKER_CELL_SIZE, MARKER_CELL_SIZE)));
- if (none_zero_count > MARKER_CELL_SIZE*MARKER_CELL_SIZE/2)
- bit_matrix.at(y, x) = 1;
- else
- bit_matrix.at(y, x) = 0;
- }
- }
-
-
- bool good_marker = false;
- int rotation_idx;
- for (rotation_idx = 0; rotation_idx < 4; ++rotation_idx)
- {
- if (hammingDistance(bit_matrix) == 0)
- {
- good_marker = true;
- break;
- }
- bit_matrix = bitMatrixRotate(bit_matrix);
- }
- if (!good_marker) goto __wrongMarker;
-
-
- Marker& final_marker = possible_markers[i];
- final_marker.m_id = bitMatrixToId(bit_matrix);
- std::rotate(final_marker.m_corners.begin(), final_marker.m_corners.begin() + rotation_idx, final_marker.m_corners.end());
- final_markers.push_back(final_marker);
-
- __wrongMarker:
- continue;
- }
- }
得到最终的Marker后,为了之后计算精确的摄像机位置,还需对Marker四个顶点的坐标进行子像素提取,这一步很简单,直接使用cornerSubPix即可。
- void MarkerRecognizer::markerRefine(cv::Mat& img_gray, vector& final_markers)
- {
- for (int i = 0; i < final_markers.size(); ++i)
- {
- vector& corners = final_markers[i].m_corners;
- cornerSubPix(img_gray, corners, Size(5,5), Size(-1,-1), TermCriteria(CV_TERMCRIT_ITER, 30, 0.1));
- }
- }
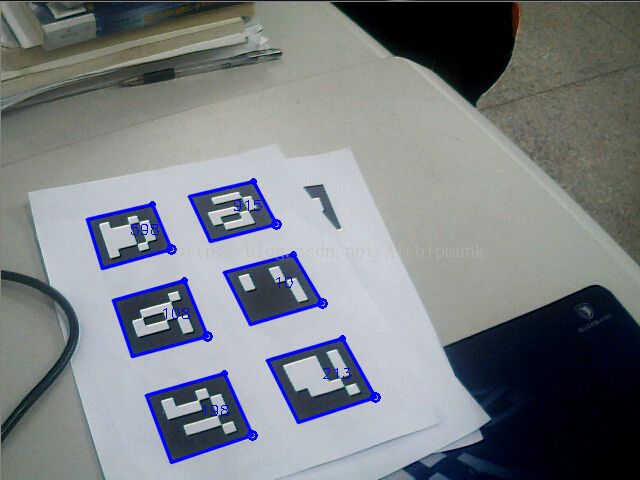
为了检查算法的结果,将Marker的提取结果画到了图像上。其中蓝色边框标记了Marker的区域,空心圆圈代表Marker的1号顶点(正向放置时的左上角),较小的实心原点代表2号顶点,数字代表Marker的ID。
2、计算摄像机位置
计算摄像机的位置,首先需要对摄像机进行标定,标定是确定摄像机内参矩阵K的过程,一般用棋盘进行标定,这已经是一个很成熟的方法了,在这就不细说了。得到相机的内参矩阵K后,就可以使用solvePnP方法求取摄像机关于某个Marker的位置。摄像机成像使用小孔模型,如下:
x = K[R|T]X
其中,X是空间某点的坐标(相对于世界坐标系),[R|T]是摄像机外参矩阵,用于将某点的世界坐标变换为摄像机坐标,K是摄像机内参,用于将摄像机坐标中的某点投影的像平面上,x即为投影后的像素坐标。
对于一个确定的Marker,x是已知的,K是已知的,使用solvePnP求取相机位置实际上就是求取相机相对于Marker的外参矩阵[R|T],但现在X还不知道,如何确定呢?
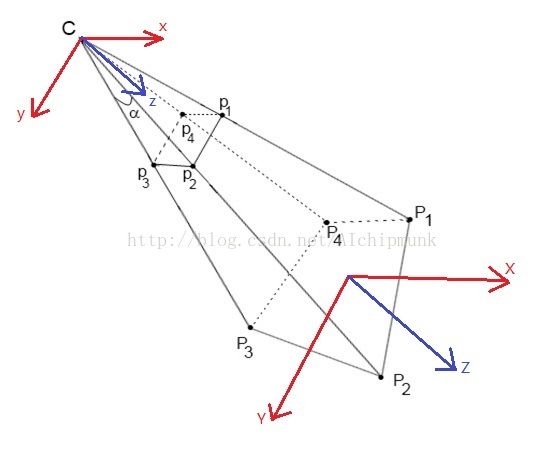
外参矩阵与世界坐标系的选取有关,而世界坐标系的选取是任意的,因此我们可以将世界坐标系直接设定在Marker上,如下图:
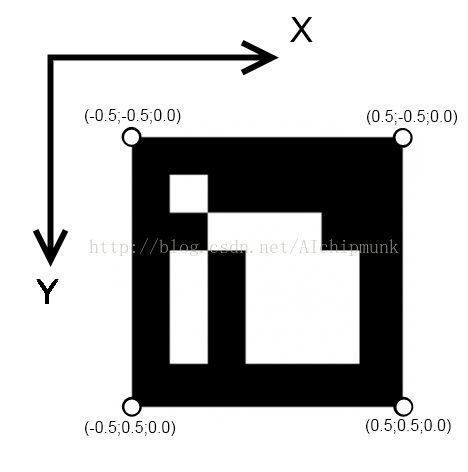
我们想象Marker位于世界坐标系的XY平面上(Z分量为零),且原点位于Marker的中心。由此,我们就确定了四个点的X坐标,将四个点的X坐标以及对应的像素坐标x传入solvePnP方法,即可得到相机关于该Marker的外参了。为了方便之后的使用,使用Rodrigues方法将旋转向量变为对应的旋转矩阵。
- void Marker::estimateTransformToCamera(vector corners_3d, cv::Mat& camera_matrix, cv::Mat& dist_coeff, cv::Mat& rmat, cv::Mat& tvec)
- {
- Mat rot_vec;
- bool res = solvePnP(corners_3d, m_corners, camera_matrix, dist_coeff, rot_vec, tvec);
- Rodrigues(rot_vec, rmat);
- }
那么现在问题来了!我们设定世界坐标系时,只设定了X轴与Y轴的方向,由于Z分量为零,它的方向并不影响求得的外参矩阵。但之后将虚拟物体放入该世界坐标时,却需要知道Z轴的方向,那么我们的Z轴方向到底是什么呢?
首先,solvePnP返回的结果是一个旋转向量和一个平移向量,两者构成一个刚体运动,刚体运动不会改变坐标系的手性(即右手坐标系经过刚体运动后还是右手坐标系),所以世界坐标系的手性应该和相机坐标系的手性一致。从相机的小孔成像模型中可以知道,相机坐标系的Z轴是指向像平面的,因此,通过下图我们可以断定,世界坐标系的Z轴是垂直于Marker向下的。
二、从OpenCV到OpenGL
得到摄像机的内参K和相对于每个Marker的外参[R|T]后,就可以开始考虑将虚拟物体添加进来了。老惯例,我还是使用OpenFrameworks。OpenFrameworks是在OpenGL基础上构建的一套框架,所以3D显示上,其本质还是OpenGL。
OpenGL的投影模型和普通相机的小孔投影模型是类似的,其PROJECTION矩阵对应与相机的内参K,MODELVIEW矩阵对应与相机的外参。但是,我们之前求得的K和[R|T]还不能直接使用,原因有二,其一,OpenGL投影模型使用的坐标系与OpenCV的不同;其二,OpenGL为了进行Clipping,其投影矩阵需要将点投影到NDC空间中。
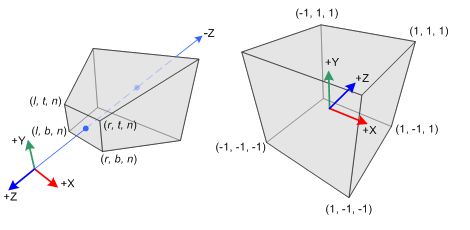
Perspective Frustum and Normalized Device Coordinates (NDC)
由上图(左边)可知,OpenGL的相机坐标系相当于OpenCV的相机坐标系绕着X轴旋转了180度,因此,我们使用外参矩阵[R|T]对世界坐标系中的某点进行变换后,还需要左乘一个旋转矩阵才能得到该点在OpenGL坐标系中的坐标。绕X轴旋转180度的旋转矩阵很简单,如下:
[ 1, 0, 0,
0, -1, 0,
0, 0, -1 ]
总之,外参矩阵[R|T]左乘以上矩阵后,即得OpenGL中的MODELVIEW矩阵,代码如下,注意OpenGL的矩阵元素是以列主序存储的。
- void ofApp::extrinsicMatrix2ModelViewMatrix(cv::Mat& rotation, cv::Mat& translation, float* model_view_matrix)
- {
-
- static double d[] =
- {
- 1, 0, 0,
- 0, -1, 0,
- 0, 0, -1
- };
- Mat_<double> rx(3, 3, d);
-
- rotation = rx*rotation;
- translation = rx*translation;
-
- model_view_matrix[0] = rotation.at<double>(0,0);
- model_view_matrix[1] = rotation.at<double>(1,0);
- model_view_matrix[2] = rotation.at<double>(2,0);
- model_view_matrix[3] = 0.0f;
-
- model_view_matrix[4] = rotation.at<double>(0,1);
- model_view_matrix[5] = rotation.at<double>(1,1);
- model_view_matrix[6] = rotation.at<double>(2,1);
- model_view_matrix[7] = 0.0f;
-
- model_view_matrix[8] = rotation.at<double>(0,2);
- model_view_matrix[9] = rotation.at<double>(1,2);
- model_view_matrix[10] = rotation.at<double>(2,2);
- model_view_matrix[11] = 0.0f;
-
- model_view_matrix[12] = translation.at<double>(0, 0);
- model_view_matrix[13] = translation.at<double>(1, 0);
- model_view_matrix[14] = translation.at<double>(2, 0);
- model_view_matrix[15] = 1.0f;
- }
下一步是求PROJECTION矩阵。由于OpenGL要做Clipping,要求所有在透视椎体中的点都投影到NDC中,在NDC中的点能够显示在屏幕上,之外的点则不能。因此,我们的PROJECTION矩阵不仅要有与内参矩阵K相同的透视效果,还得把点投影到NDC中。
首先先看看内参矩阵K的形式:
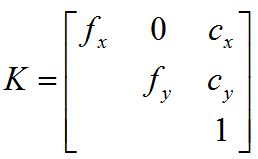
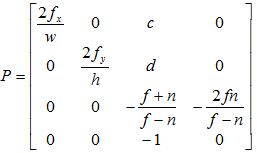
首先假设OpenGL的投影椎体是对称的,那么PROJECTION矩阵的形式如下:
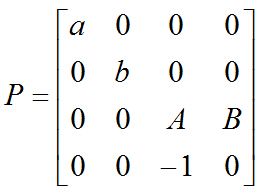
使用以上矩阵对某一点(X, Y, Z, 1)投影后,可以得到如下关系:
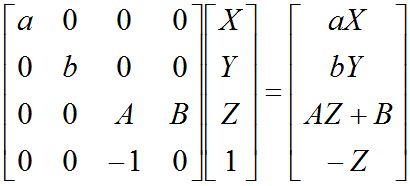
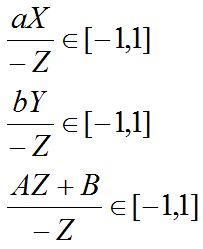
接下来,OpenGL会对该结果进行Clipping,具体方法是将四个分量都除以-Z,那么,要使我们的点最终显示到屏幕上,前三个分量在除以-Z后其变化范围必须在[-1, 1]内。如下:
由摄像机投影模型(相似三角形)知:
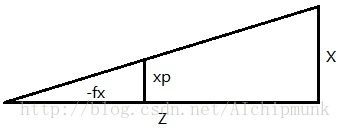

其中由于OpenGL相机的相面在Z轴负方向上,所以是-fx和-fy。xp和yp分别为某点在相面上的横坐标和纵坐标,这两个坐标的原点在图像的中心,图像的宽度和高度分别为w和h,因此xp和yp的取值范围分别为[-w/2, w/2]和[-h/2, h/2],可得:
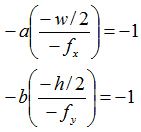
于是
接下来,我们为OpenGL相机设定两个面,near和far,只有处于这两个面之间的点才能投影到NDC空间中,所以当 Z=-n 时,(AZ+B)/-Z = -1,当 Z=-f 时,(AZ+B)/-Z = 1,由此我们可以得到关于A和B的二元一次方程,从而解出A、B:

现在再来考虑OpenGL投影椎体不对称的情况,这种情况下,PROJECTION矩阵的形式为:
由于椎体不对称,这时xp和yp的变化范围分别为[l, r]和[b, t],代表图像左侧(left)右侧(right),以及底部(bottom)顶部(top),用同样的方法,我们有:
可得:
 ,
, 
于是:
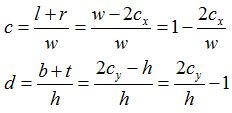
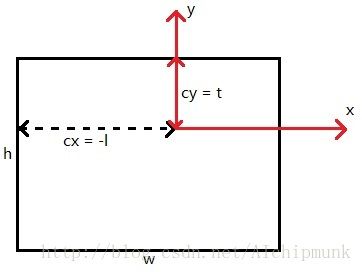
关于l+r和b+t是怎么计算的,可以参考下图:
综上所述,我们可以得到OpenGL投影矩阵的最终形式:
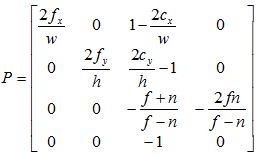
到此,我们就可以将这个矩阵的数据传递给PROJECTION矩阵了:
- void ofApp::intrinsicMatrix2ProjectionMatrix(cv::Mat& camera_matrix, float width, float height, float near_plane, float far_plane, float* projection_matrix)
- {
- float f_x = camera_matrix.at<float>(0,0);
- float f_y = camera_matrix.at<float>(1,1);
-
- float c_x = camera_matrix.at<float>(0,2);
- float c_y = camera_matrix.at<float>(1,2);
-
- projection_matrix[0] = 2*f_x/width;
- projection_matrix[1] = 0.0f;
- projection_matrix[2] = 0.0f;
- projection_matrix[3] = 0.0f;
-
- projection_matrix[4] = 0.0f;
- projection_matrix[5] = 2*f_y/height;
- projection_matrix[6] = 0.0f;
- projection_matrix[7] = 0.0f;
-
- projection_matrix[8] = 1.0f - 2*c_x/width;
- projection_matrix[9] = 2*c_y/height - 1.0f;
- projection_matrix[10] = -(far_plane + near_plane)/(far_plane - near_plane);
- projection_matrix[11] = -1.0f;
-
- projection_matrix[12] = 0.0f;
- projection_matrix[13] = 0.0f;
- projection_matrix[14] = -2.0f*far_plane*near_plane/(far_plane - near_plane);
- projection_matrix[15] = 0.0f;
- }
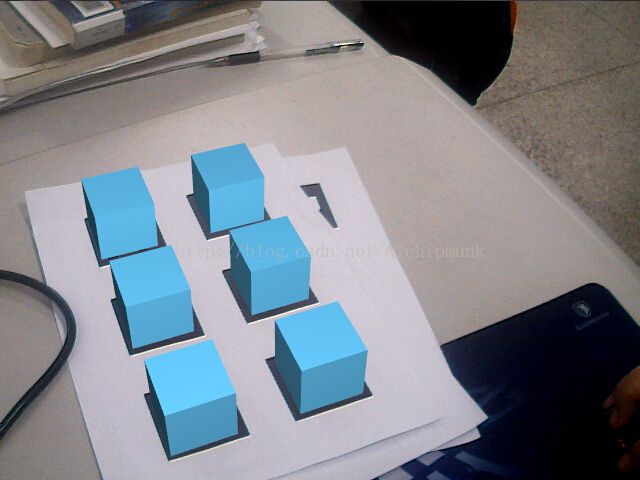
现在是时候放一些虚拟物体进来了,为了简单,我就放了几个立方体,由于OpenFrameworks绘制立方体时以立方体在中心为原点,所以为了使立方体的底面贴在Marker上,必须在Marker上方二分之一立方体边长的地方绘制,也就是绘制立方体的坐标为(0, 0, -0.5*size),为什么是负0.5呢?还记得之前所说的世界坐标系的Z轴是垂直于Marker并朝下的吗?所以要画在Marker上方,必须向Z轴负方向移动!
- void ofApp::draw(){
-
- ofSetColor(255);
- float view_width = ofGetViewportWidth();
- float view_height = ofGetViewportHeight();
- m_video.draw(0, 0, view_width, view_height);
-
-
- intrinsicMatrix2ProjectionMatrix(m_camera_matrix, 640, 480, 0.01f, 100.0f, m_projection_matrix);
- ofSetMatrixMode(OF_MATRIX_PROJECTION);
-
- static float reflect[] =
- {
- 1, 0, 0, 0,
- 0, -1, 0, 0,
- 0, 0, 1, 0,
- 0, 0, 0, 1
- };
- ofLoadMatrix(reflect);
-
- ofMultMatrix(m_projection_matrix);
-
-
- ofSetMatrixMode(OF_MATRIX_MODELVIEW);
- ofLoadIdentityMatrix();
-
-
- ofSetColor(255);
- ofEnableBlendMode(OF_BLENDMODE_ALPHA);
- ofEnableDepthTest();
- glShadeModel(GL_SMOOTH);
- m_light.enable();
- ofEnableSeparateSpecularLight();
-
- vector& markers = m_recognizer.getMarkers();
- Mat r, t;
- for (int i = 0; i < markers.size(); ++i)
- {
-
- markers[i].estimateTransformToCamera(m_corners_3d, m_camera_matrix, m_dist_coeff, r, t);
- extrinsicMatrix2ModelViewMatrix(r, t, m_model_view_matrix);
- ofLoadMatrix(m_model_view_matrix);
-
- ofSetColor(0x66,0xcc,0xff);
-
-
- ofDrawBox(0, 0, -0.4f, 0.8f);
- }
-
-
- ofDisableDepthTest();
- m_light.disable();
- ofDisableLighting();
- ofDisableSeparateSpecularLight();
-
- ofSetMatrixMode(OF_MATRIX_MODELVIEW);
- ofLoadIdentityMatrix();
- ofSetMatrixMode(OF_MATRIX_PROJECTION);
- ofLoadIdentityMatrix();
- }
注意,我在设置投影矩阵时,左乘了一个垂直方向的镜像矩阵,这是因为,我发现OpenFrameworks将NDC空间中(-1, -1)点映射到屏幕的左上角,而非一般OpenGL所映射的左下角,如果不乘这个镜像矩阵,得到的图像就是上下颠倒的。至于为什么OpenFrameworks是这样,由于没仔细研究它的代码,我只能猜测是其在初始化时对OpenGL做了一些设置所致。所以,如果我的理解或猜测有错误,还请大家指出^_^
最后给出代码的下载地址,程序用VS2012开发,解压后放到”OpenFrameworks安装目录\apps\myApps“下打开编译:
http://download.csdn.net/detail/aichipmunk/8207875