【统计学习方法-李航-笔记总结】二、感知机(感知机的原始形式与对偶形式)
本文是李航老师《统计学习方法》第二章的笔记,欢迎大佬巨佬们交流。
主要包括以下几部分:
1. 感知机模型
2. 感知机策略
3. 感知机算法
1. 感知机模型
感知机是二分类的线性分类模型,其输入为实例的特征向量,输出为实例的类别,取+1和-1两个值。感知机旨在求出将训练数据进行线性划分的超平面,为此利用基于误分类的损失函数,利用梯度下降对其极小化,求得感知机模型。
定义:假设输入空间(特征空间)是X∈![]() ,输出空间是Y={-1,+1},输入x∈X表示实例的特征向量,对应于输入空间(特征空间)的点,输出y∈Y表示的实例类别,由输入空间到输出空间的如下函数成为感知机。
,输出空间是Y={-1,+1},输入x∈X表示实例的特征向量,对应于输入空间(特征空间)的点,输出y∈Y表示的实例类别,由输入空间到输出空间的如下函数成为感知机。
![]()
其中:w为权值,b为偏置,wx表示w和x的内积,sign是符号函数,即:
感知机模型的假设空间是定义在特征空间中的所有线性分类模型,即函数集合![]()
感知机有如下解释:线性方程![]() 对应于特征空间
对应于特征空间![]() 中的一个超平面S,其中w是超平面的法向量,b是超平面的截距,这个超平面将特征空间划分为两个部分,位于两部分的点(特征向量)分别为正类和负类
中的一个超平面S,其中w是超平面的法向量,b是超平面的截距,这个超平面将特征空间划分为两个部分,位于两部分的点(特征向量)分别为正类和负类

感知机模型主要求w和b,从而对新的实例给出预测。
2. 学习策略
(1)线性可分数据集:给定一个数据集![]() ,其中,
,其中,![]() ,如果存在某个超平面S,
,如果存在某个超平面S,![]() ,能够将数据集的正实例点和负实例点完全正确地划分到超平面两侧,则称数据集T为线性可分数据集。
,能够将数据集的正实例点和负实例点完全正确地划分到超平面两侧,则称数据集T为线性可分数据集。
(2)损失函数:损失函数的一个自然的选择是误分类点总数,但是这样的损失函数不是参数w,b的连续可导函数,不易优化,因此考虑另一种选择,即计算误分类点到超平面S的总距离。
首先,已知点(x0,y0)到直线Ax+By+C=0的距离公式为:![]()
那么输入空间中的任一点x0到超平面的距离为: ,||w||是w的L2范数
,||w||是w的L2范数
其次,对于误分类的数据来说,有:![]() ,因为当
,因为当![]() 时,yi = -1,而
时,yi = -1,而![]() 时,yi=+1
时,yi=+1
因此,误分类点xi到超平面S的距离为:
这样,假设超平面S的误分类点集合为M,那么所有误分类点到超平面S的总距离是:
不考虑 ,则感知机的损失函数为:
,则感知机的损失函数为:
若没有误分类的点,损失函数值为0,误分类点越少,函数值越小,该函数是w,b的连续可导函数。
3. 感知机学习算法
(1)算法的原始形式(相对于对偶形式):
优化感知机就是求其损失函数极小化的过程:
优化的过程是采用随机梯度下降法,任意选取一个超平面w0,b0(初始值,初始值不同时结果也不同),每次随机选取一个误分类点使其梯度下降,直至所有的误分类点都被选取过。
假设误分类点集合M是固定的,那么损失函数L(w,b)的梯度为:

随机选取一个误分类点(xi,yi),对w,b进行更新,直到yi(wxi+b)>0停止更新:

η是学习率,0≤η≤1
这里区分两个概念:
梯度下降:一次将误分类集合中所有误分类点的梯度下降;
随机梯度下降:随机选取一个误分类点使其梯度下降。
算法流程描述如下:

上述过程的直观解释是:当一个实例点被误分类,也就是说它位于分类超平面的错误一侧时,调整w,b的值,使分类超平面向该误分类点的一侧移动,以减少该误分类点与超平面的距离,直至超平面越过该误分类点,使其被正确分类。
(2)算法的收敛性:
通俗的理解,模型优化算法收敛就是经过有限次迭代后,模型的损失函数趋近于0(或者接近0的值),也就是说,对于线性可分数据集,感知机模型算法收敛即是经过有限次迭代后,可以得到一个将训练数据集完全正确划分的分离超平面。
此处有Novikoff定理:

证明(1)由于数据集线性可分,据线性可分的定义,存在超平面可将训练集数据完全正确分开,取此超平面为:![]() ,由于有限的i = 1,2,...,N,均有
,由于有限的i = 1,2,...,N,均有 ,
,
所以存在![]() ,使
,使![]()
证明(2)
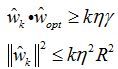
首先证明两个不等式:
证明第一个:
令感知机算法的初始值为![]()
若存在实例误分类,则需要不断更新权重,令wk-1是进行第k个误分类之前的权重,即
![]()
![]()
![]()
则第k步更新过程为
则![]()
则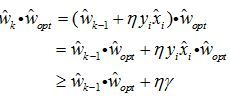
递推上述不等式,得![]()
证明第二个不等式:
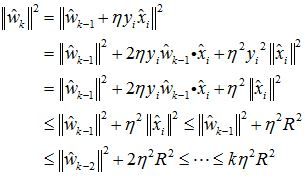
综合上述:
![]()

上述定理表明,误分类次数k是有上界的,即经过有限次搜索,可以找到将训练集数据完全正确分开的分类超平面,也就是说,当训练集数据线性可分时,感知学习算法的原始形式迭代是收敛的。我们对(2)中的R与γ进行理解。如果R越大,也就是max||x^i||越大,此时相当于有一个点距离原点很远,在初始化时,我们常常初始化w=0,b=0,所以我们要到达正确的分界面所需要的迭代次数也就越多,因此上界越大;如果γ越小,即min{yi(wopt⋅xi+bopt)}越小,也就是说,对于点xi,yi来说,虽然它被正确分类,但是它离最优分界面wopt,bopt很近,所以很容易就因为在对其它点进行更新时,导致这个点被误分类,因而迭代次数的上界越大。
引申:由上述可知,感知机算法存在许多解,这些解即依赖于初值的选择,又依赖于迭代中误分类点的选择顺序,为了得到唯一的超平面,要对分类超平面增加约束条件,这就是后面支持向量机的想法。当训练集线性不可分时,感知机学习孙发不收敛,迭代结果将发生震荡。
(3)感知机的对偶形式
对偶形式的基本想法是,将w和b表示为实例xi和标记yi的线性组合的形式,通过求解其系数而求得w和b。
对于初值w0和b0,误分类点(xi,yi),通过 逐步修改w,b,设修改n次,则w和b关于(xi,yi)的增量分别是
逐步修改w,b,设修改n次,则w和b关于(xi,yi)的增量分别是![]() ,这里
,这里![]() ,则最后学到的w和b可以表示为:
,则最后学到的w和b可以表示为:
算法流程描述如下:


α相当于把原始形式中的w写成展开形式,所以更新时只加η就够了,b还用的原始形式,没有变。
感知学习算法的对偶形式的迭代是收敛的,与原始形式一样,存在多个解。
对偶形式中的训练实例以内积出现,为了方便,可以先计算实例间两两的内积,存储为矩阵,即Gram矩阵,![]()
感知机中的原始形式与对偶形式与支持向量机是对应的,接下来将更新支持向量机的部分。
参考文献:
《统计学习方法》,李航