关于胶囊检测的思考-代码实现
**
关于胶囊检测的思考-代码实现
作者:Simon Song
**
先看两张图。我们要实现对生产胶囊的快速检测,有两种方案,一种是DNN方式,一种是openCV方法。为避开大量样本集的问题,我选择的是openCV方式实现胶囊检测。
检测规则如下:
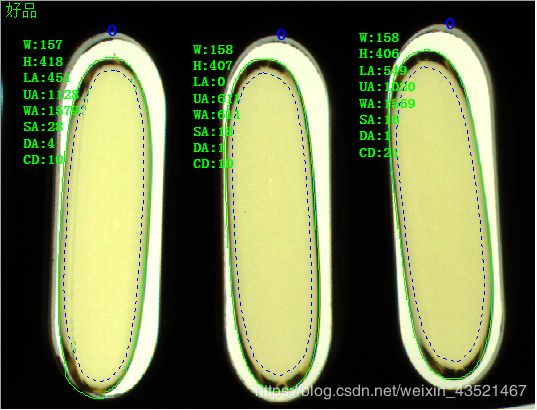
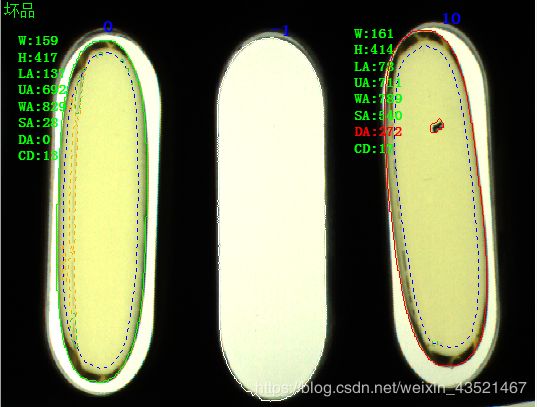
一、三个胶囊不全为空,且检测结果均为好品,该幅图判断为好品。三个胶囊不全为空,有至少一个胶囊为坏品,该幅图判断为坏品。
二、每个胶囊分别检测,顶部蓝色数字代表每个胶囊检测结果:
-1:空
0:好品
其他大于1的数字代表不同缺陷种类,请自行编号。
三、左侧显示检测参数,例如:W宽,H高,DA脏点面积。可按实际需要显示。
四、好品胶囊标注为绿色。坏品胶囊标注为红色,相应错误参数也标注为红色。
代码环境:
VS2005+openCV341+C++
先给出我的实现代码:
#include> min_contours(1);//轮廓数量与轮廓向量一致,此处1个就行
//基于RDP获得最小轮廓点 (多变型轮廓点数量),参数:(原轮廓,目标轮廓,最小量,封闭状态)
approxPolyDP(capsule_contours[max_pos],min_contours[0],5,true);
printf("capsule min_contours[%d].size()=%d\n",0, min_contours[0].size());
//2.2模型的最小轮廓
vector> model_min_contours(1);//轮廓数量与轮廓向量一致,此处1个就行
//基于RDP获得最小轮廓点 (多变型轮廓点数量),参数:(原轮廓,目标轮廓,最小量,封闭状态)
approxPolyDP(model_contours[max_model_contours],model_min_contours[0],5,true);
printf("model min_contours[%d].size()=%d\n", 0, model_min_contours[0].size());
//绘制,
Mat compare_contours_img = Mat::zeros(mask.size(),CV_8UC3);
drawContours(compare_contours_img, min_contours,0,Scalar(0,0,255),1);
drawContours(compare_contours_img, model_min_contours, 0, Scalar(0, 255, 0), 1);
imshow("compare_contours_img", compare_contours_img);
//2.3形状比较,完全相同返回0,最大值为1,参数:(轮廓1,轮廓2,轮廓匹配表示(CV_CONTOURS_MATCH_I1/I2/I3),0)
double score = matchShapes(model_min_contours[0], min_contours[0], CV_CONTOURS_MATCH_I1, 0);
cout << "score=" << score << endl;//打印提示
//判断得分
if (score > 0.10) {//大于10%返回true
putText(compare_contours_img, "alien", Point(20, 20), CV_FONT_NORMAL, 0.5, Scalar(0, 0, 255), 1);//添加文字显示
imshow("compare_contours_img", compare_contours_img);
return true;//返回真
}
else {//否则返回假
putText(compare_contours_img, "normal", Point(20, 20), CV_FONT_NORMAL, 0.5, Scalar(0, 255, 0), 1);//添加文字显示
imshow("compare_contours_img", compare_contours_img);
return false;//返回假
}
*/
//2.使用凸包测试
//2.1胶囊的最大轮廓点
vector<vector<Point>> convex_contours(1);//轮廓数量与轮廓向量一致,此处1个就行
//获得凸包,参数:(原轮廓,目标轮廓,顺时针方向状态,返回点状态)
convexHull(capsule_contours[max_pos], convex_contours[0],false,true);
//printf("capsule min_contours[%d].size()=%d\n", 0, convex_contours[0].size());
//2.2模型的最大轮廓
vector<vector<Point>> model_convex_contours(1);//轮廓数量与轮廓向量一致,此处1个就行
//获得凸包,参数:(原轮廓,目标轮廓,顺时针方向状态,返回点状态)
convexHull(model_contours[max_model_contours], model_convex_contours[0],false,true);
//printf("model min_contours[%d].size()=%d\n", 0, model_convex_contours[0].size());
//绘制轮廓,方便观察
Mat compare_contours_img = Mat::zeros(mask.size(), CV_8UC3);//定义比较图
//参数:(图,轮廓,轮廓下标位置,颜色,线宽)
drawContours(compare_contours_img, convex_contours, 0, Scalar(0, 0, 255), 1);
drawContours(compare_contours_img, model_convex_contours, 0, Scalar(0, 255, 0), 1);
//imshow("compare_contours_img", compare_contours_img);
//2.3形状比较,完全相同返回0,最大值为1,参数:(轮廓1,轮廓2,轮廓匹配表示(CV_CONTOURS_MATCH_I1/I2/I3),0)
double score = matchShapes(model_convex_contours[0], convex_contours[0], CV_CONTOURS_MATCH_I1, 0);
cout << "score=" << score << endl;//打印提示
//判断得分
if (score > 0.10) {//大于10%返回true
//putText(compare_contours_img,"alien",Point(20,20),CV_FONT_NORMAL,0.5,Scalar(0,0,255),1);//添加文字显示
//imshow("compare_contours_img", compare_contours_img);
//给定值
data.classification = 1;//给定异形类别
data.height = local_data.height;//高
data.width = local_data.width;//宽
data.area = local_data.area;//面积
return true;//返回真
}
else {//否则返回假
//putText(compare_contours_img, "normal", Point(20, 20), CV_FONT_NORMAL, 0.5, Scalar(0, 255, 0), 1);//添加文字显示
//imshow("compare_contours_img", compare_contours_img);
return false;//返回假
}
}
bool is_big_and_small_func(Mat& mask,Mydata& data) {//判断大小头函数
//imshow("is_big_and_small_func",mask);
//发现轮廓
vector<vector<Point>> contours;//轮廓向量
vector<Vec4i> hierarchy;//拓扑结构向量
//参数:(二值化图,轮廓向量,拓扑结构向量,发现方法,检测方法,偏移量点)
findContours(mask,contours,hierarchy,RETR_EXTERNAL,CHAIN_APPROX_NONE,Point(0,0));
//获得斜矩阵
RotatedRect rotaterect = minAreaRect(contours[0]);
//给定本地数据,宽高认为调整一下,以便显示正常
Mydata Local_data;//定义本地数据
Local_data.height = (rotaterect.size.height>rotaterect.size.width? rotaterect.size.height: rotaterect.size.width);//赋值高
Local_data.width = (rotaterect.size.height>rotaterect.size.width ? rotaterect.size.width : rotaterect.size.height);//赋值宽
Local_data.area = contourArea(contours[0]);//赋值面积
//更改斜矩阵大小,获得25%和75%的直线
int height = rotaterect.size.height;//获得高
int width= rotaterect.size.width;//获得宽
//cout << "width=" << width << endl;
//cout << "height=" << height << endl;
RotatedRect rrect_25_75 = rotaterect;//25%,75%
RotatedRect rrect = rotaterect;//50%
Point2f rrect25_75_points[4];//定义点信息
Point2f rrect_points[4];//定义点信息
if (width>height) {//宽大,调宽
//调整25%和75%
rrect_25_75.size.width = width / 2;//高处理
rrect_25_75.points(rrect25_75_points);//获得四个点信息
//50%处理
rrect.size.width = 1;//高处理
rrect.points(rrect_points);//获得四个点信息
}
else {//否则,高大,调高
//调整25%和75%
rrect_25_75.size.height = height / 2;//高处理
rrect_25_75.points(rrect25_75_points);//获得四个点信息
//50%处理
rrect.size.height = 1;//高处理
rrect.points(rrect_points);//获得四个点信息
}
//在新的掩码图中绘制直线
Mat new_mask=mask.clone();//定义图片;
for (int i = 0; i < 4;i++) {//循环点位置
//绘制线,25_75
//line(new_mask, rrect25_75_points[i], rrect25_75_points[(i+1)%4],Scalar(0),1,LINE_AA);
//绘制线,50
line(new_mask,rrect_points[i], rrect_points[(i+1)%4],Scalar(0),5,LINE_AA);
}
//imshow("new_mask", new_mask);
/*//换个思路,先注掉,此思路只对明显大小头有效
//反色获得直线图,并掩码只剩下白色直线
Mat ref_new_mask;
bitwise_not(new_mask,ref_new_mask);//非操作,得到反色图
Mat and_ref_new_mask;
bitwise_and(ref_new_mask,mask,and_ref_new_mask);//与掩码图像,得到纯值线图
//图形学-开操作,取出外侧的零散边缘
Mat element = getStructuringElement(MORPH_RECT,Size(3,3),Point(-1,-1));
morphologyEx(and_ref_new_mask, and_ref_new_mask,MORPH_OPEN,element,Point(-1,-1),1);
imshow("ref_new_mask", and_ref_new_mask);
//霍夫直线获得直线坐标
vector lines;//定义直线向量
//参数:(8位灰度图,vec4f的向量,像素扫描步长,角度扫描步长,交点阈值,最小直线长度,最大长度间隔)
HoughLinesP(and_ref_new_mask,lines,1,CV_PI/180,30,mask.cols/2,10);
//搜索合适的直线
Point2f pointlines[3][2] = {0,0,0,0,0,0};//用于保存最长直线位置,方便后续操作
float lengths[3] = {0,0,0};//用于保存长度的数组,[0]为上线,[1]位置为中线,[2]位置为下线
cout << "lines.size()=" << lines.size() << endl;
Mat hough_img = Mat::zeros(mask.size(),CV_8UC3);
for (int c = 0; c < lines.size();c++) {//循环线
Vec4f hline = lines[c];//获得点前向量
float length = abs(hline[0] - hline[2]) + abs(hline[1] - hline[3]);//计算长度
//判断,hline[1]表示y位置
if (hline[1]>100&& hline[1]<200&&length>lengths[0]) {//上线,且大于最大长度
//保存点向量
pointlines[0][0]=Point(hline[0], hline[1]);//点1
pointlines[0][1] = Point(hline[2], hline[3]);//点2
//保存长度
lengths[0] = length;
}else if (hline[1]>200 && hline[1]<300&&length>lengths[1]) {//中线,且大于最大长度
//保存点向量
pointlines[1][0] = Point(hline[0], hline[1]);//点1
pointlines[1][1] = Point(hline[2], hline[3]);//点2
//保存长度
lengths[1] = length;
}else if (hline[1]>300&&length>lengths[2]) {//下线,且大于最大长度
//保存点向量
pointlines[2][0] = Point(hline[0], hline[1]);//点1
pointlines[2][1] = Point(hline[2], hline[3]);//点2
//保存长度
lengths[2] = length;
}
}
//绘制显示
//画线
line(hough_img, pointlines[0][0], pointlines[0][1], Scalar(0, 0, 255), 1);//上线
line(hough_img, pointlines[1][0], pointlines[1][1], Scalar(0, 0, 255), 1);//中线
line(hough_img, pointlines[2][0], pointlines[2][1], Scalar(0, 0, 255), 1);//下线
printf("Point(%f,%f),Point(%f,%f),length=%f\n", pointlines[0][0].x, pointlines[0][0].y, pointlines[0][1].x, pointlines[0][1].y, lengths[0]);//打印提示,上线
printf("Point(%f,%f),Point(%f,%f),length=%f\n", pointlines[1][0].x, pointlines[1][0].y, pointlines[1][1].x, pointlines[1][1].y, lengths[1]);//打印提示,上线
printf("Point(%f,%f),Point(%f,%f),length=%f\n", pointlines[2][0].x, pointlines[2][0].y, pointlines[2][1].x, pointlines[2][1].y, lengths[2]);//打印提示,上线
imshow("hough_img", hough_img);
//筛选并计算直线长度,c^2=|x1-x2|^2+|y1-y2|^2
//比较长度,当大于N个点时,应给大小头,否则为正常范围内的胶囊
// ----- 1
// ----- 2
// ----- 3
// 大小端的全部条件
// 线1与线3的差值绝对值较大
// 线1与线2的差值绝对值较大
// 线2与线3的差值绝对值较大
*/
//发现轮廓,后面比较上下两部分
vector<vector<Point>> half_contours;//轮廓向量
vector<Vec4i> half_hierarchy;//拓扑结构
//参数:(二值化图,轮廓向量,拓扑结构向量,发现方法,检测方法,偏移量点)
findContours(new_mask,half_contours,half_hierarchy,RETR_LIST,CHAIN_APPROX_NONE,Point(0,0));
cout << "half_contours.size()=" <<half_contours.size()<< endl;
//形状比较, 完全相同返回0,最大值为1,参数:(轮廓1,轮廓2,轮廓匹配表示(CV_CONTOURS_MATCH_I1 / I2 / I3), 0)
double score = matchShapes(half_contours[0],half_contours[1],CV_CONTOURS_MATCH_I3,0);
cout << "is_big_and_small_func:score="<<score<< endl;
//判断
if (score > 0.085) {//当得分大于0.085时,返回真,表示大小头,此值需要按实际调整
//给定数据
data.classification = 2;//赋值分类器,2为大小端
data.height = Local_data.height;//赋值高
data.width = Local_data.width;//赋值宽
data.area = Local_data.area;//赋值面积
return true;
}
else {//否则
return false;//返回假
}
}
bool is_bobble_and_blackP_func(Mat& capsule,Mat& mask,Mydata& data) {//判气泡和黑点函数,绘制问题位置
//获得轮廓原图
Mat capsule_org;//定义胶囊图
capsule.copyTo(capsule_org, mask);//掩码拷贝图
//imshow("is_bobble_and_blackP_func:capsule_org", capsule_org);
//灰度图
Mat gray;
cvtColor(capsule_org,gray,CV_BGR2GRAY);
//二值化
Mat binary;//二值化图
//threshold(gray,binary,130,255,THRESH_BINARY_INV);//二值化
Canny(capsule,binary,150,230,3,true);//canny
//imshow("is_bobble_and_blackP_func:binary",binary);
//掩码图片
Mat new_binary;
binary.copyTo(new_binary,mask);
//膨胀处理,使位置更明显
Mat element = getStructuringElement(MORPH_RECT,Size(3,3),Point(-1,-1));//定义结构元素,参数:(形状,核尺寸,锚点)
morphologyEx(new_binary,new_binary,MORPH_DILATE,element,Point(-1,-1),1);//膨胀处理,参数:(图,目标图,操作标记,核元素,锚点,迭代次数)
//imshow("binary_mask",new_binary);
//1.发现轮廓
vector<vector<Point>> capsule_contours;//轮廓向量
vector<Vec4i> capsule_hierarchy;//拓扑结构变量
//参数:(二值化图,轮廓向量,拓扑结构变量,检测方法,发现方法,偏移量)
findContours(new_binary, capsule_contours, capsule_hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point(-1, -1));
//计算总面积
double total_area = 0;//白区面积
vector<vector<Point>> capsule_save;//胶囊子轮廓保存
int bubble_num=0;//气泡数量变量
int black_num = 0;//黑点数量变量
for (int c = 0; c < capsule_contours.size(); c++) {//循环胶囊轮廓
double area = contourArea(capsule_contours[c])/10;//计算面积
//cout << "area/10=" <
if (area > 7) {//气泡
bubble_num++;//气泡数量变量加1
//绘制轮廓
drawContours(capsule, capsule_contours, c, Scalar(0,0, 255), 1);
//面积累加
total_area += area;
}else if(area>=3){//噪点
black_num ++;//黑点数量变量
//绘制轮廓
drawContours(capsule, capsule_contours, c, Scalar(255, 0, 255), 1);
//面积累加
total_area += area;
}
}
//imshow("contours_img", capsule);
//判断返回
if (bubble_num>=1 || black_num >=1) {//当子轮廓数量有时
//给定数据
data.classification = (bubble_num > 0 ? 3 : 4);//当气泡数量大于0时,为气泡,否则为黑点
data.area = total_area;//赋值面积
return true;//返回真
}else {//否则
return false;//返回假
}
}
Mydata capsule_processing_funciton(Mat& capsule, Mat& mask, Mat&small_mask) {//胶囊处理函数,返回胶囊所需数据
//定义自定义结构体变量
Mydata data;
//初始化结构体变量
data.classification = -1;
data.height = -1;
data.width = -1;
data.area = -1;
//1判空
if (is_empty_func(mask)) {
data.classification = 5;//分类赋值,5为空
data.height = 0;//高为0
data.width = 0;//宽为0
}else{//2.否则
//判断
if (is_alien_func(mask,data)) {//2.1判异形
//打印提示
cout << "capsule_processing_funciton:alien shape"<< endl;
}else if (is_big_and_small_func(mask,data)) {//2.2判大小端
//打印提示
cout << "capsule_processing_funciton:big and small shape" << endl;
}else if (is_bobble_and_blackP_func(capsule, small_mask,data)) {//2.3判气泡或黑点,如果是,那么问题位置由函数绘制上去
cout << "capsule_processing_funciton:bobble or blackPoint" << endl;
//计算掩码的宽高
//发现轮廓
vector<vector<Point>> contours;//轮廓
vector<Vec4i> hierarchy;//拓扑结构变量
//参数:(二值化图,轮廓向量,检测方法,发现方法,偏移点),偏移点用于大图还原,此处未用到
findContours(mask, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point(0, 0));//发现轮廓
//获得最小斜矩形
RotatedRect rrect = minAreaRect(contours[0]);
//赋值数据,为何防止出现宽高显示不对的情况,人为调整一下
data.height = (rrect.size.height>rrect.size.width? rrect.size.height:rrect.size.width);//高
data.width = (rrect.size.height>rrect.size.width ? rrect.size.width :rrect.size.height);//宽
}else {//否则为正常胶囊
cout << "capsule_processing_funciton:normal capsule" << endl;
//计算掩码的宽高
//发现轮廓
vector<vector<Point>> contours;//轮廓
vector<Vec4i> hierarchy;//拓扑结构变量
//参数:(二值化图,轮廓向量,检测方法,发现方法,偏移点),偏移点用于大图还原,此处未用到
findContours(mask, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point(0, 0));//发现轮廓
//获得最小斜矩形
RotatedRect rrect = minAreaRect(contours[0]);
//赋值数据,为何防止出现宽高显示不对的情况,人为调整一下
data.height = (rrect.size.height>rrect.size.width ? rrect.size.height : rrect.size.width);//高
data.width = (rrect.size.height>rrect.size.width ? rrect.size.width : rrect.size.height);//宽
data.classification = 0;//赋值类型,0为好品
data.area = 0;//面积给0
}
}
return data;//返回数据
}
void drawCapsule_function(Mat& capsule,Mat&blk_mask, Mat& mask, Mat& small_mask,Mydata& data) {//绘制胶囊掩码
//发现大轮廓
vector<vector<Point>> big_contours;//大轮廓向量
vector<Vec4i> big_hierarchy;//大拓扑结构向量
//参数:(二值化图,轮廓向量,检测方法,发现方法,偏移点),偏移点用于大图还原,此处未用到
findContours(mask,big_contours,big_hierarchy,RETR_EXTERNAL,CHAIN_APPROX_NONE,Point(-1,-1));
//发现小轮廓
vector<vector<Point>> small_contours;//小轮廓向量
vector<Vec4i> small_hierarchy;//小拓扑结构向量
//参数:(二值化图,轮廓向量,检测方法,发现方法,偏移点),偏移点用于大图还原,此处未用到
findContours(small_mask,small_contours,big_hierarchy,RETR_EXTERNAL,CHAIN_APPROX_NONE,Point(-1,-1));
//根据分类,绘制内轮廓和外轮廓
if (data.classification >= 0 && data.classification<=4) {//好品(0)获得其他1-4的情况
//绘制轮廓,好品(0)绘制绿色,1-4情况绘制红色
drawContours(capsule,big_contours,-1,(data.classification==0? Scalar(0, 255, 0): Scalar(0, 0, 255)),1,LINE_AA,big_hierarchy);
}else if (data.classification == 5) {//空(5)
//反色掩码处理,方便获得轮廓
Mat ref_blk_mask;
bitwise_not(blk_mask,ref_blk_mask);
//发现大轮廓
vector<vector<Point>> ref_blk_mask_contours;//大轮廓向量
vector<Vec4i> ref_blk_mask_hierarchy;//大拓扑结构向量
//参数:(二值化图,轮廓向量,检测方法,发现方法,偏移点),偏移点用于大图还原,此处未用到
findContours(ref_blk_mask, ref_blk_mask_contours, ref_blk_mask_hierarchy, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point(-1, -1));
//绘制轮廓,白色
drawContours(capsule, ref_blk_mask_contours, -1, Scalar(255, 255, 255), 1, LINE_AA, ref_blk_mask_hierarchy);
}else {//坏品(-1)
//绘制轮廓,红色
drawContours(capsule, big_contours, -1, Scalar(0, 0, 255), 1, LINE_AA, big_hierarchy);
}
//绘制内轮廓
if (data.classification!=5) {//判断不为空
//绘制内轮廓,蓝色(直线)
//drawContours(capsule,small_contours,-1,Scalar(255,0,0),1,LINE_AA,small_hierarchy);
//画虚线(自定义函数)
drawDashContours(capsule, small_contours, 0, Scalar(255, 0, 0),1,LINE_AA,5);
}
}
void putText_function(Mat& src, Rect&pos, Mydata& data) {//在图片上写文本
//判空
if (src.empty()) {//图为空
return;//返回
}
//定义对应类别数组
char* class_name[] = {"bad","good","alien","big_and_small","bubble","black point","empty"};
//放入文字-类别
//参数:(图,文本,原点,字体,缩放比,颜色,线宽,线型,底左对齐(倒过来的效果))
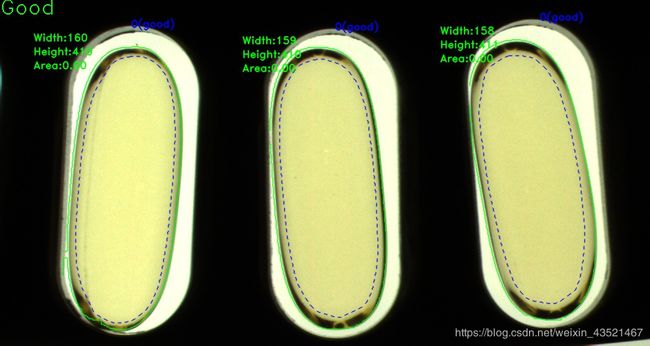
putText(src,format("%d(%s)",data.classification,class_name[data.classification+1]),Point(pos.x+pos.width/2,pos.y),CV_FONT_NORMAL,0.5,Scalar(255,0,0),1,LINE_AA,false);
if(data.classification!=5){//当分类不等于空(5)时,绘制文字
//放入文字-宽
putText(src,format("Width:%d",data.width),Point(pos.x-pos.width/5,pos.y+20),CV_FONT_NORMAL,0.5,Scalar(0,255,0),1,LINE_AA,false);
//放入文字-高
putText(src,format("Height:%d",data.height),Point(pos.x-pos.width/5,pos.y+40),CV_FONT_NORMAL,0.5,Scalar(0,255,0),1,LINE_AA,false);
//放入文字-面积
putText(src,format("Area:%.2f",data.area),Point(pos.x-pos.width/5,pos.y+60),CV_FONT_NORMAL,0.5,((data.area>0)?Scalar(0,0,255): Scalar(0, 255, 0)),1,LINE_AA,false);
}
}
void drawDashContours(InputOutputArray image, InputArrayOfArrays contours,
int contourIdx, const Scalar& color,int thinkness=1,int lineType=8, int gap_threshold=10) {//自定义函数,实现画虚线轮廓
//获得图像(引用关系)
Mat img = image.getMat();
//定义并获取轮廓总个数
int ncontours = (int)contours.total();
//当轮廓总数量为0或指定轮廓数字大于(总轮廓数-1)时直接返回
if (ncontours==0|| contourIdx>(ncontours-1)) {
return;
}
//定义存储区
AutoBuffer<Point*> _ptsptr(ncontours);//用于存储点的双指针,大小与轮廓数一致
AutoBuffer<int> _npts(ncontours);//用于存储每个轮廓点的个数的单指针,大小与轮廓数一致
Point** ptsptr= _ptsptr;//获得双指针,方便后面添加数据
int* npts= _npts;//获得单指针,方便后面添加数据
//判断轮廓标记
if (contourIdx <0) {//当轮廓号为-1时,循环处理
for (int i = 0; i < ncontours; i++) {//循环轮廓位置
Mat p = contours.getMat(i);//循环获取矩阵(引用关系)
CV_Assert(p.checkVector(2,CV_32S)>=0);//检查向量个数,有条件为假,断言判断报错,checkVector参数:(通道数,数据深度)返回向量个数,CV_Assert参数:(条件)
ptsptr[i]=p.ptr<Point>();//赋值当前轮廓,获得点指针
npts[i] = p.rows*p.cols*p.channels() / 2;//赋值点数量,行*列*通道数/2
}
}else {//当轮廓不为-1时,指定位置处理
Mat p = contours.getMat(contourIdx);
CV_Assert(p.checkVector(2, CV_32S) >= 0);//检查向量个数,有条件为假,断言判断报错,checkVector参数:(通道数,数据深度),CV_Assert参数:(条件)
ptsptr[contourIdx] = p.ptr<Point>();//赋值当前轮廓,获得点指针
npts[contourIdx] = p.rows*p.cols*p.channels() / 2;//赋值点数量,行*列*通道数/2
}
//循环轮廓数组指针位置和每个轮廓的点个数
int threshold = (gap_threshold<0||gap_threshold>15)?10:gap_threshold;//定义间隔阈值,当阈值在0-15之间时使用阈值,否则给固定阈值10
int counter_threshold[2] = {0,0};//阈值计数器,用于统计当前是否转化状态,[0]画线统计,[1]空统计
for (int i = 0; i < sizeof(ptsptr);i++ ) {//循环外层指针位置
for (int j = 0; j <npts[i];j++) {//循环此层的点个数
//判断间隔
if(counter_threshold[0]<threshold){//当[0]位置统计数小于阈值时,画线
//画线,参数:(图,点1,点2,颜色,线宽,线型)
line(img, ptsptr[i][j], ptsptr[i][(j+1)% npts[i]], color,thinkness,lineType);//%取余为了确保数据范围
counter_threshold[0]++;//当前状态阈值加1
counter_threshold[1] = 0;//空阈值为0
}else if(counter_threshold[1]<threshold){//当[1]位置统计数小于阈值时,计数
counter_threshold[1]++;//空阈值阈值加1
}else {//否则[0]位置计数统计归0,继续画线
counter_threshold[0]=0;//当前状态阈值为0
//画线,参数:(图,点1,点2,颜色,线宽,线型)
line(img, ptsptr[i][j], ptsptr[i][(j + 1) % npts[i]], color,thinkness,lineType);//%取余为了确保数据范围
counter_threshold[0]++;//当前状态阈值加1
counter_threshold[1] = 0;//空阈值为0
}
}
}
}
好的样本模型抠图(goodmodel.bmp):

实现部分效果:

主要思想:
1.获得胶囊本身。(重点)
2.对胶囊进行各种检测。(重点)
3.对每组胶囊的状态进行组合,判断给出结果。
4.给后台或显示结果。
细节说明:
1.对于胶囊提取:我们需要使用掩码、颜色范围、二值化三个部分完成操作。原因很简单,单个算法是无法完成总胶囊提取的。
2.对于胶囊检测来说,按照不同检测内容,使用不同的方法。其中异型使用凸包+形状比较得分处理,大小端使用轮廓斜矩阵切半+上下两部分形状比较得分处理,气泡和黑点使用Canny(边缘提取)+MorphologyEx(图像学)+findContours(轮廓)完成不同面积的抽取,再进行筛选。
3.对于胶囊外部的虚线如何实现:使用轮廓向量(多个点形成的完整轮廓),自己实现绘制轮廓功能,因为openCV没有给出画虚线的直接方法。实现思路就是间隔几个点绘制线,再间隔几个点不绘线,虚线就形成了。
以上程序和说明都是实际测试过的。
需要再优化的内容:
1.对于胶囊边缘的提取,如何更好的去噪。
2.对于检测点的提取,如何更好。
我是Simon, 在这里期待与您的交流。