相位式激光测距法中相位产生原理
相位式激光测距法中相位产生原理
一、激光测距原理
根据基本原理,实现激光测距的方法有两大类:飞行时间(TOF)测距和非飞行时间测距,飞行时间测距中有脉冲式激光测距和相位式激光测距,非飞行时间测距主要是三角激光测距,如下图所示。

1.1 脉冲式激光测距
脉冲式测距是激光技术最早应用于测绘领域中的一种测量方式。由于激光发散角小,激光脉冲持续时间极短,瞬时功率极大可大兆瓦以上,因而可以达到极远的测程。一般情况下不使用合作目标,而是利用被测目标对光信号的漫反射来测距,测量距离可表示为:
式中 L L 为测量距离, c c 为光在空气中传播的速度, Δt Δ t 为光波信号在测距仪与目标往返的时间。
一般在非精密测量中,光在空气中的传播速度取真空中的 3×108m/s 3 × 10 8 m / s (现代物理学通过对光频率和波长的测量推导出的精确值为 2.99792458×108m/s 2.99792458 × 10 8 m / s ),若在精密测量中可参考空气的状态进行修正得到精确值。

脉冲激光的发射角小,能量在空间相对集中,瞬时功率大,利用这些特性可制成各种中远距离激光测距仪、激光雷达等。目前,脉冲式激光测距广泛应用在地形地貌测量、地质勘探、工程施工测量、飞行器高度测量、人造地球卫星相关测距、天体之间距离测量等遥测技术方面。
脉冲式测距法相比与其他两种测距方法来说简单粗暴的多,原理也很好理解,通过一个高频率的时钟驱动计数器对收发脉冲之间的时间进行计数,这就使得计数时钟的周期必须远小于发送脉冲和接收脉冲之间的时间才能够保证足够的精度,因此这种测距方法适用于远距离测量,而达到毫米级别的测量采用脉冲式测距所付出的硬件成本实在太高。
1.2 相位式激光测距法
相位式激光测距通常适应于中短距离的测量,测量精度可达毫米、微米级,也是目前测距精度最高的一种方式,大部分短程测距仪都采用这种工作方式。相位式测距则是将一调制信号对发射光波的光强进行调制,通过测量相位差来间接测量时间,较直接测量往返时间的处理难度降低了许多。测量距离可表示为:
式中 L L 为测量距离, c c 为光在空气中传播的速度, T T 为调制信号的周期时间, ϕ ϕ 为发射与接收波形的相位差。
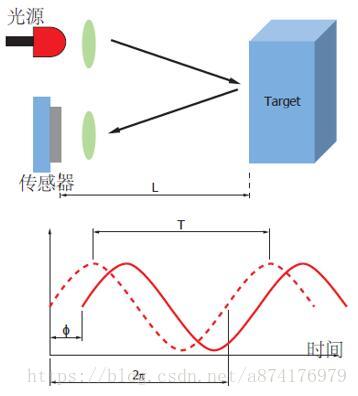
在实际的单一频率测量中,只能分辨出不足2π的部分而无法得到超过一个周期的测距值。对于采用单一调制频率的测距仪,当选择调制信号的频率为100KHz时,所对应的测程就为1500m,也即当测量的实际距离值在1500m之内时,得到的结果就是正确的,而当测量距离大于1500m时,所测得的结果只会在1500m之内,此时就出现了错误。
所以,在测量时需要根据最大测程来选择调制频率。当所设计的系统测相分辨率一定时,选择的频率越小,所得到的距离分辨率越高,测量精度也越高。即在单一调制频率的情况下,大测程与高精度是不能同时满足的。
相位式激光测距可以达到毫米级别的测量精度,当初在调研的时候一直有一个疑惑,如果发射信号的相位和接收信号的相位差是光走过的距离产生的,那么相位式和脉冲式的原理基本一样,达到毫米级别精度的话发射信号和接收信号的相位差将极小,这个问题后面会详细说明。
1.3 三角测距法
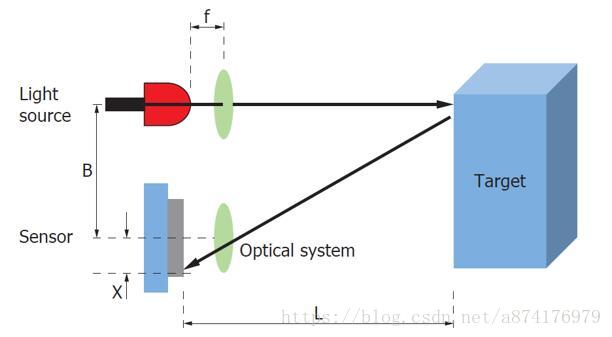
三角测距法即光源、被测物面、光接收系统三点共同构成一个三角形光路,由激光器发出的光线,经过汇聚透镜聚焦后入射到被测物体表面上,光接收系统接收来自入射点处的散射光,并将其成像在光电位置探测器敏感面上,通过光点在成像面上的位移来测量被测物面移动距离的一种测量方法。距离表示如下:
式中 L L 为测量距离, f f 为sensor与透镜中心的距离, X X 为反射光斑与sensor中心的距离, B B 为发射光与sensor中心的距离。
激光三角测距法具有结构简单、测试速度快、使用灵活方便等诸多优点,但由于激光三角测距系统中,光接收器件接收的是待测目标面的散射光,所以对器件灵敏度要求很高。另外,如激光亮度高、单色性好、方向性强,在近距离的测量中较为容易测量出光斑的位置。因此三角法应用范围主要是微位移的测量,测量范围主要在微米、毫米、厘米数量级,已经研发的具有相应功能的测距仪,广泛应用于物体表面轮廓、宽度、厚度等量值的测量,例如汽车工业中车身模型曲面设计、激光切割、扫地机器人等。
1.4 距离测量方法比较

三种激光测距方式的特点如上表所示,脉冲式TOF的优点是测量范围广且光学系统紧凑,但是高速读取脉冲光的电路设计和配置较为复杂。
相位式TOF在近距离测量中测量精度更高,同时由于无需时间测量的电路,电路设计比较简单,因而此方法可以用于整列传感器中,然而相位式TOF不能分辨实际距离在一个还是多个测量周期内,因而不适用于长距离的测量。
三角测距法的优势是小距离下测量精度高,但是缺点为电路的小型集成化比较困难,并且测量易受外界环境光的影响。
二、相位激光测距原理详解
前面简单的介绍了三种激光测距方法,对于脉冲式激光测距和三角式激光测距原理都比较好理解,这里主要详细说明一下相位式激光测距中相位差到底是如何产生的,对于当初自己的疑惑做一个记录。
相位式激光测距中发射信号和接收信号的相位差是如何产生的,对于这个问题一开始直接的想法是光走过的距离产生的,如果真是这样那么假设相位式激光测距可以达到1mm的测量精度,即相位差为光走过2mm的时间,这个时间约为:
6.7 ps p s 这个时间太小了,很难测到,现在市面上可以买到的激光测距仪可以很轻松的达到1mm精度,经过拆解发现根本没有很复杂的测相电路,因此不禁考虑,相位差产生的原因真的是由于时差导致的么。经过大量的文献调研和自己的理解之后发现其实相位差的产生和光本身并没有什么关系,光只是作为一种载体而已,而且正由于光速如此之快才能使得相位式可以达到这么高的精度。分析如下:
假设一个调制光波形如下图所示,在没有障碍物的时候是一直向前传播的。

如果这时候遇到一堵墙或者一面镜子,光路沿原路返回,情况如下:

其中蓝色是发射光,红色是反射光,从图中可以很清楚的看到,当发射光遇到了墙之后发生发射,其反射的波形实际上是没有遇到墙之后波形的镜像,因此其相位差的大小与光速没有关系,而和发射光在何时遇到障碍物有关。为了有更直观的体现相位差和障碍物距离之间的关系,通过matlab对这个现象进行仿真,代码如下:
hold off
clear all
f=100;%信号频率Hz
fs=10000;%采样频率Hz
N=400;%采样点数
t=(0:N-1)/fs;%采样时间s
for j = 175 : 225
x=sin(2*pi*f*t);%信号采样值
D = j;
x1 = x(1:D);
x2 = x(D+1:N);
for i = 1 : D
x3(i) = x1(D+1-i);
end
plot(x2);
hold on
plot(x3);
hold off
pause(0.5);
end 输出的结果如下图所示,可以看出当最左边的墙距离发射波形不同相位时,反射信号与发射信号的相位差也在改变。因此相位法测距中相位差的产生和光速没有任何关系,光在其中只是作为一种载体。