camer驱动模块加载分析
在平时工作中,camera模块是经常进行调试修改的模块,所以熟悉camera的工作流程以及工作原理将会大大的提供工作效率,但对于整个android系统camera是个十分复杂的模块,下面对camera的驱动加载进行分析。
1、 Camera成像简介
图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。目前的 SENSOR 类型有两种:CCD(ChargeCouple Device)和CMOS(ComplementaryMetal Oxide Semiconductor)。CCD电荷耦合器件,它是目前高像素类 sensor 中比较成熟的成像器件,是以一行为单位的电流信号。CMOS互补金属氧化物半导体。CMOS的信号是以点为单位的电荷信号,更为敏感,速度也更快,更为省电。ISP 的性能是决定影像流畅的关键,JPEGencoder 的性能也是关键指标之一。而 JPEGencoder 又分为硬件 JPEG 压缩方式和软件 RGB压缩方式。DSP 控制芯片的作用是:将感光芯片获取的数据及时快速地传到 baseband 中并刷新感光芯片,因此控制芯片的好坏,直接决定画面品质(比如色彩饱和度、清晰度)与流畅度。
2、Camera的硬件原理图及引脚
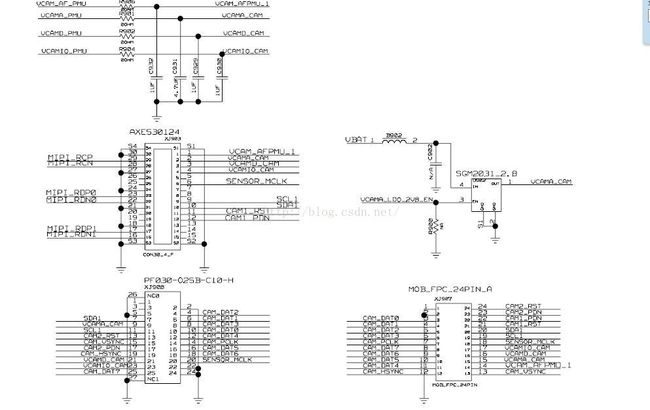
2.1、 电源部分:
2.2、 Sensor Input 部分:
b) :Standby/PowerDown信号,用于进入待机模式,降低功耗。
c) :Mclk,即MasterClock 信号,是由 BB 端提供。2.3、Sensor OutPut 部分:
a) :Pclk,即 PixelClock 信号,由 MCLK 分频得到,作为外部时钟控制图像传输帧率;
b) :HSYNC,行同步信号,其上升沿表示新一列行图像数据的开始;
c) :VSYNC,帧同步信号,其下降沿表示新的一帧图片的开始;
d) :D0-D9 一共 10 根数据线(8/10 根等)。
2.4、I2C 部分:
3、Camera架构

上图的架构相信大家都有了一定的了解,android 将系统大致分为应用层、库文件和硬件抽象层、Linux 内核三层。在底层的内核空间,Camera 的 driver 将其驱动起来以后,将硬件驱动的接口交给硬件抽象层,android 上层的 Camera 应用程序在 android 实时系统中的虚拟机中,加载 android 留给 Camera 公用的一些库文件,调用硬件抽象层的接口来控制 Camera硬件来实现功能。当然,如果是 Raw 模式的 Camera,还需要在硬件抽象层调用一些参数来控制 Camera 的效果。
Kernel 部分主要有两块:一块是image sensor 驱动,负责具体型号的sensor 的id 检测,上电,以及在preview,capture,初始化,3A 等等功能设定时的寄存器配置。另一块是isp driver,通过DMA 将sensor数据流上传。
HAL层这边主要分3 块,一块是imageio,主要是数据buffer上传的pipe。一块是drv,包含imgsensor 和isp 的hal 层控制。最后是feature io,包含各种3A 等性能配置。4、Camera image sensor驱动模块驱动加载
#if 1 ///defined(CONFIG_VIDEO_CAPTURE_DRIVERS)
retval = platform_device_register(&sensor_dev);
if (retval != 0){
return retval;
}
#endif
static struct platform_device sensor_dev = {
.name = "image_sensor",
.id = -1,
};static struct platform_driver g_stCAMERA_HW_Driver = {
.probe = CAMERA_HW_probe,
.remove = CAMERA_HW_remove,
.suspend = CAMERA_HW_suspend,
.resume = CAMERA_HW_resume,
.driver = {
.name = "image_sensor",
.owner = THIS_MODULE,
}
};
/*=======================================================================
* CAMERA_HW_i2C_init()
*=======================================================================*/
static int __init CAMERA_HW_i2C_init(void)
{
struct proc_dir_entry *prEntry;
//i2c_register_board_info(CAMERA_I2C_BUSNUM, &kd_camera_dev, 1);
i2c_register_board_info(SUPPORT_I2C_BUS_NUM1, &i2c_devs1, 1); // 填充i2c的板极文件
//i2c_register_board_info(SUPPORT_I2C_BUS_NUM2, &i2c_devs2, 1);
if(platform_driver_register(&g_stCAMERA_HW_Driver)){ // 注册platform总线的driver
PK_ERR("failed to register CAMERA_HW driver\n");
return -ENODEV;
}
//if(platform_driver_register(&g_stCAMERA_HW_Driver2)){
// PK_ERR("failed to register CAMERA_HW driver\n");
// return -ENODEV;
//}
//Register proc file for main sensor register debug
prEntry = create_proc_entry("driver/camsensor", 0, NULL); //在proc下创建driver/camsensor这个节点,用于前置摄像头进行adb效果调试
if (prEntry) {
prEntry->read_proc = CAMERA_HW_DumpReg_To_Proc;
prEntry->write_proc = CAMERA_HW_Reg_Debug;
}
else {
PK_ERR("add /proc/driver/camsensor entry fail \n");
}
//Register proc file for sub sensor register debug
prEntry = create_proc_entry("driver/camsensor2", 0, NULL); //在proc下创建driver/camsensor2这个节点,用于后置摄像头进行adb效果调试
if (prEntry) {
prEntry->read_proc = CAMERA_HW_DumpReg_To_Proc;
prEntry->write_proc = CAMERA_HW_Reg_Debug2;
}
else {
PK_ERR("add /proc/driver/camsensor2 entry fail \n");
}
atomic_set(&g_CamHWOpend, 0);
//atomic_set(&g_CamHWOpend2, 0);
atomic_set(&g_CamDrvOpenCnt, 0);
//atomic_set(&g_CamDrvOpenCnt2, 0);
atomic_set(&g_CamHWOpening, 0);
return 0;
}
static struct platform_driver g_stCAMERA_HW_Driver = {
.probe = CAMERA_HW_probe,
.remove = CAMERA_HW_remove,
.suspend = CAMERA_HW_suspend,
.resume = CAMERA_HW_resume,
.driver = {
.name = "image_sensor",
.owner = THIS_MODULE,
}
};
static int CAMERA_HW_probe(struct platform_device *pdev)
{
return i2c_add_driver(&CAMERA_HW_i2c_driver);
}
struct i2c_driver CAMERA_HW_i2c_driver = {
.probe = CAMERA_HW_i2c_probe,
.remove = CAMERA_HW_i2c_remove,
.driver.name = CAMERA_HW_DRVNAME1,
.id_table = CAMERA_HW_i2c_id,
};
static int CAMERA_HW_i2c_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int i4RetValue = 0;
PK_DBG("[CAMERA_HW] Attach I2C \n");
//get sensor i2c client
spin_lock(&kdsensor_drv_lock);
g_pstI2Cclient = client; //这里是获得我们的clientdevice,并且以platform方式进行注册
//set I2C clock rate
g_pstI2Cclient->timing = 300;//200k
spin_unlock(&kdsensor_drv_lock);
//Register char driver
i4RetValue = RegisterCAMERA_HWCharDrv(); // 注册字符驱动
if(i4RetValue){
PK_ERR("[CAMERA_HW] register char device failed!\n");
return i4RetValue;
}
//spin_lock_init(&g_CamHWLock);
PK_DBG("[CAMERA_HW] Attached!! \n");
return 0;
}
inline static int RegisterCAMERA_HWCharDrv(void)
{
struct device* sensor_device = NULL;
#if CAMERA_HW_DYNAMIC_ALLOCATE_DEVNO
if( alloc_chrdev_region(&g_CAMERA_HWdevno, 0, 1,CAMERA_HW_DRVNAME1) ) // 动态分配一个字符设备
{
PK_DBG("[CAMERA SENSOR] Allocate device no failed\n");
return -EAGAIN;
}
#else
if( register_chrdev_region( g_CAMERA_HWdevno , 1 , CAMERA_HW_DRVNAME1) ) // 静态分配一个字符设备
{
PK_DBG("[CAMERA SENSOR] Register device no failed\n");
return -EAGAIN;
}
#endif
//Allocate driver
g_pCAMERA_HW_CharDrv = cdev_alloc(); // 申请一个cdev结构体
if(NULL == g_pCAMERA_HW_CharDrv)
{
unregister_chrdev_region(g_CAMERA_HWdevno, 1);
PK_DBG("[CAMERA SENSOR] Allocate mem for kobject failed\n");
return -ENOMEM;
}
//Attatch file operation.
cdev_init(g_pCAMERA_HW_CharDrv, &g_stCAMERA_HW_fops); //关联到file_operation进入字符设备
g_pCAMERA_HW_CharDrv->owner = THIS_MODULE;
//Add to system
if(cdev_add(g_pCAMERA_HW_CharDrv, g_CAMERA_HWdevno, 1)) //将我们分配的字符设备,attach上file_operation添加到system
{
PK_DBG("[mt6516_IDP] Attatch file operation failed\n");
unregister_chrdev_region(g_CAMERA_HWdevno, 1);
return -EAGAIN;
}
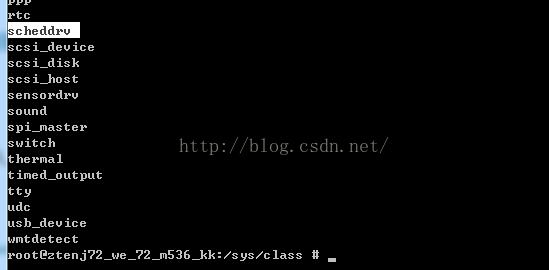
sensor_class = class_create(THIS_MODULE, "sensordrv"); //创建一个sensordrv类
if (IS_ERR(sensor_class)) {
int ret = PTR_ERR(sensor_class);
PK_DBG("Unable to create class, err = %d\n", ret);
return ret;
}
sensor_device = device_create(sensor_class, NULL, g_CAMERA_HWdevno, NULL, CAMERA_HW_DRVNAME1);
return 0;
}
static const struct file_operations g_stCAMERA_HW_fops =
{
.owner = THIS_MODULE,
.open = CAMERA_HW_Open,
.release = CAMERA_HW_Release,
.unlocked_ioctl = CAMERA_HW_Ioctl
};
static int CAMERA_HW_Open(struct inode * a_pstInode, struct file * a_pstFile)
{
//reset once in multi-open
if ( atomic_read(&g_CamDrvOpenCnt) == 0) {
//default OFF state
//MUST have
//kdCISModulePowerOn(DUAL_CAMERA_MAIN_SENSOR,"",true,CAMERA_HW_DRVNAME1);
//kdCISModulePowerOn(DUAL_CAMERA_SUB_SENSOR,"",true,CAMERA_HW_DRVNAME1);
//kdCISModulePowerOn(DUAL_CAMERA_MAIN_2_SENSOR,"",true,CAMERA_HW_DRVNAME1);
//kdCISModulePowerOn(DUAL_CAMERA_MAIN_SENSOR,"",false,CAMERA_HW_DRVNAME1);
//kdCISModulePowerOn(DUAL_CAMERA_SUB_SENSOR,"",false,CAMERA_HW_DRVNAME1);
//kdCISModulePowerOn(DUAL_CAMERA_MAIN_2_SENSOR,"",false,CAMERA_HW_DRVNAME1);
}
//
atomic_inc(&g_CamDrvOpenCnt);
return 0;
}
static long CAMERA_HW_Ioctl(
struct file * a_pstFile,
unsigned int a_u4Command,
unsigned long a_u4Param
)
{
int i4RetValue = 0;
void * pBuff = NULL;
u32 *pIdx = NULL;
mutex_lock(&kdCam_Mutex);
if(_IOC_NONE == _IOC_DIR(a_u4Command)) {
}
else {
pBuff = kmalloc(_IOC_SIZE(a_u4Command),GFP_KERNEL); //申请分配一个buffer
if(NULL == pBuff) {
PK_DBG("[CAMERA SENSOR] ioctl allocate mem failed\n");
i4RetValue = -ENOMEM;
goto CAMERA_HW_Ioctl_EXIT;
}
if(_IOC_WRITE & _IOC_DIR(a_u4Command)){ //判断是否可写
//将用户传递过来的命令参数复制到内核空间,接下来我们会根据这个数据进行选择
if(copy_from_user(pBuff , (void *) a_u4Param, _IOC_SIZE(a_u4Command))) {
kfree(pBuff);
PK_DBG("[CAMERA SENSOR] ioctl copy from user failed\n");
i4RetValue = -EFAULT;
goto CAMERA_HW_Ioctl_EXIT;
}
}
}
pIdx = (u32*)pBuff;
switch(a_u4Command) {
#if 0
case KDIMGSENSORIOC_X_POWER_ON:
i4RetValue = kdModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM) *pIdx, true, CAMERA_HW_DRVNAME);
break;
case KDIMGSENSORIOC_X_POWER_OFF:
i4RetValue = kdModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM) *pIdx, false, CAMERA_HW_DRVNAME);
break;
#endif
case KDIMGSENSORIOC_X_SET_DRIVER:
i4RetValue = kdSetDriver((unsigned int*)pBuff);
break;
case KDIMGSENSORIOC_T_OPEN:
i4RetValue = adopt_CAMERA_HW_Open();
break;
case KDIMGSENSORIOC_X_GETINFO:
i4RetValue = adopt_CAMERA_HW_GetInfo(pBuff);
break;
case KDIMGSENSORIOC_X_GETRESOLUTION:
i4RetValue = adopt_CAMERA_HW_GetResolution(pBuff);
break;
case KDIMGSENSORIOC_X_FEATURECONCTROL:
i4RetValue = adopt_CAMERA_HW_FeatureControl(pBuff);
break;
case KDIMGSENSORIOC_X_CONTROL:
i4RetValue = adopt_CAMERA_HW_Control(pBuff);
break;
case KDIMGSENSORIOC_T_CLOSE:
i4RetValue = adopt_CAMERA_HW_Close();
break;
case KDIMGSENSORIOC_T_CHECK_IS_ALIVE:
i4RetValue = adopt_CAMERA_HW_CheckIsAlive();
break;
case KDIMGSENSORIOC_X_GET_SOCKET_POS:
i4RetValue = kdGetSocketPostion((unsigned int*)pBuff);
break;
case KDIMGSENSORIOC_X_SET_I2CBUS:
//i4RetValue = kdSetI2CBusNum(*pIdx);
break;
case KDIMGSENSORIOC_X_RELEASE_I2C_TRIGGER_LOCK:
//i4RetValue = kdReleaseI2CTriggerLock();
break;
default :
PK_DBG("No such command \n");
i4RetValue = -EPERM;
break;
}
if(_IOC_READ & _IOC_DIR(a_u4Command)) {
if(copy_to_user((void __user *) a_u4Param , pBuff , _IOC_SIZE(a_u4Command))) {
kfree(pBuff);
PK_DBG("[CAMERA SENSOR] ioctl copy to user failed\n");
i4RetValue = -EFAULT;
goto CAMERA_HW_Ioctl_EXIT;
}
}
kfree(pBuff);
CAMERA_HW_Ioctl_EXIT:
mutex_unlock(&kdCam_Mutex);
return i4RetValue;
}
case KDIMGSENSORIOC_T_OPEN:
i4RetValue = adopt_CAMERA_HW_Open();
break;
inline static int adopt_CAMERA_HW_Open(void)
{
UINT32 err = 0;
KD_IMGSENSOR_PROFILE_INIT();
if (atomic_read(&g_CamHWOpend) == 0 ) {
if (g_pSensorFunc) { //判断我们imagesensor 操作函数指针是否为NULL,如果为NULL,报错,因为我们就是靠这个操作函数集合去操作imagesensor 的
err = g_pSensorFunc->SensorOpen(); // 会调用到kd_MultiSensorFunc里面的kd_MultiSensorOpen函数
if(ERROR_NONE != err) {
PK_DBG(" ERROR:SensorOpen(), turn off power \n");
kdModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM*) g_invokeSocketIdx, g_invokeSensorNameStr, false, CAMERA_HW_DRVNAME1);
}
}
else {
PK_DBG(" ERROR:NULL g_pSensorFunc\n");
}
KD_IMGSENSOR_PROFILE("SensorOpen");
}
else {
//PK_ERR("adopt_CAMERA_HW_Open Fail, g_CamHWOpend = %d,g_CamHWOpend2 = %d\n ",atomic_read(&g_CamHWOpend),atomic_read(&g_CamHWOpend2) );
PK_ERR("adopt_CAMERA_HW_Open Fail, g_CamHWOpend = %d\n ",atomic_read(&g_CamHWOpend) );
}
if (err == 0 ) {
atomic_set(&g_CamHWOpend, 1);
//atomic_set(&g_CamHWOpend2, 1);
}
return err?-EIO:err;
} /* adopt_CAMERA_HW_Open() */
MUINT32 kd_MultiSensorOpen ( void )
{
MUINT32 ret = ERROR_NONE;
MINT32 i = 0;
KD_MULTI_FUNCTION_ENTRY(); // 得到当前时间
for ( i = (KDIMGSENSOR_MAX_INVOKE_DRIVERS-1) ; i >= KDIMGSENSOR_INVOKE_DRIVER_0 ; i-- ) {
if ( g_bEnableDriver[i] && g_pInvokeSensorFunc[i] ) {
// turn on power
ret = kdCISModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM)g_invokeSocketIdx[i],(char*)g_invokeSensorNameStr[i],true,CAMERA_HW_DRVNAME1);
if ( ERROR_NONE != ret ) { // 上电
PK_ERR("[%s]",__FUNCTION__);
return ret;
}
//wait for power stable
mDELAY(10);
KD_IMGSENSOR_PROFILE("kdModulePowerOn");
ret = g_pInvokeSensorFunc[i]->SensorOpen(); //调用到模块驱动中的open函数,g_pInvokeSensorFunc保存的值为模块驱动中的SENSOR_FUNCTION_STRUCT SensorFuncGC2035这个结构体
if ( ERROR_NONE != ret ) {
kdCISModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM)g_invokeSocketIdx[i],(char*)g_invokeSensorNameStr[i],false,CAMERA_HW_DRVNAME1); // 掉电
PK_ERR("SensorOpen");
return ret;
}
}
}
KD_MULTI_FUNCTION_EXIT();
return ERROR_NONE;
}
case KDIMGSENSORIOC_X_SET_DRIVER:
i4RetValue = kdSetDriver((unsigned int*)pBuff);
break;
int kdSetDriver(unsigned int* pDrvIndex)
{
ACDK_KD_SENSOR_INIT_FUNCTION_STRUCT *pSensorList = NULL; // 这是一个保存cameraId跟cameraName的结构体
u32 drvIdx[KDIMGSENSOR_MAX_INVOKE_DRIVERS] = {0,0};
u32 i;
PK_XLOG_INFO("pDrvIndex:0x%08x/0x%08x \n",pDrvIndex[KDIMGSENSOR_INVOKE_DRIVER_0],pDrvIndex[KDIMGSENSOR_INVOKE_DRIVER_1]);
//set driver for MAIN or SUB sensor
if (0 != kdGetSensorInitFuncList(&pSensorList)) //调用这个函数,取得所有添加的sensor的结构的首地址
{
PK_ERR("ERROR:kdGetSensorInitFuncList()\n");
return -EIO;
}
for ( i = KDIMGSENSOR_INVOKE_DRIVER_0; i < KDIMGSENSOR_MAX_INVOKE_DRIVERS ; i++ ) {
//
spin_lock(&kdsensor_drv_lock);
g_bEnableDriver[i] = FALSE;
g_invokeSocketIdx[i] = (CAMERA_DUAL_CAMERA_SENSOR_ENUM)((pDrvIndex[i] & KDIMGSENSOR_DUAL_MASK_MSB)>>KDIMGSENSOR_DUAL_SHIFT); // 保存camera的sensorId
spin_unlock(&kdsensor_drv_lock);
drvIdx[i] = (pDrvIndex[i] & KDIMGSENSOR_DUAL_MASK_LSB);
//
if ( DUAL_CAMERA_NONE_SENSOR == g_invokeSocketIdx[i] ) { continue; }
//ToDo: remove print information
PK_XLOG_INFO("[kdSetDriver] i,g_invokeSocketIdx[%d] = %d :\n",i,i,drvIdx[i]);
PK_XLOG_INFO("[kdSetDriver] i,drvIdx[%d] = %d :\n",i,i,drvIdx[i]);
//
if ( MAX_NUM_OF_SUPPORT_SENSOR > drvIdx[i] ) {
if (NULL == pSensorList[drvIdx[i]].SensorInit) {
PK_ERR("ERROR:kdSetDriver()\n");
return -EIO;
}
pSensorList[drvIdx[i]].SensorInit(&g_pInvokeSensorFunc[i]);// 调用模块驱动中的init函数,将模块驱动里面的SENSOR_FUNCTION_STRUCT SensorFuncOV2685值传递给g_pInvokeSensorFunc结构体
if (NULL == g_pInvokeSensorFunc[i]) {
PK_ERR("ERROR:NULL g_pSensorFunc[%d]\n",i);
return -EIO;
}
//
spin_lock(&kdsensor_drv_lock);
g_bEnableDriver[i] = TRUE;
g_CurrentInvokeCam = g_invokeSocketIdx[i];
spin_unlock(&kdsensor_drv_lock);
//get sensor name
memcpy((char*)g_invokeSensorNameStr[i],(char*)pSensorList[drvIdx[i]].drvname,sizeof(pSensorList[drvIdx[i]].drvname));
//return sensor ID
//pDrvIndex[0] = (unsigned int)pSensorList[drvIdx].SensorId;
PK_XLOG_INFO("[kdSetDriver] :[%d][%d][%d][%s][%d]\n",i,g_bEnableDriver[i],g_invokeSocketIdx[i],g_invokeSensorNameStr[i],sizeof(pSensorList[drvIdx[i]].drvname));
}
}
return 0;
}
UINT32 kdGetSensorInitFuncList(ACDK_KD_SENSOR_INIT_FUNCTION_STRUCT **ppSensorList)
{
if (NULL == ppSensorList)
{
PK_DBG("[kdGetSensorInitFuncList]ERROR: NULL ppSensorList\n");
return 1;
}
*ppSensorList = &kdSensorList[0]; // kdSensorList在kd_sensorlist.h文件里面,就是保存cameraId,cameraNmae,模块驱动人口函数的结构体
return 0;
}
而ioctl里面的其他几条cmd命令基本都是在获取到了g_pInvokeSensorFunc后然后调用模块驱动中的各个接口函数,例如:
case KDIMGSENSORIOC_T_OPEN:
i4RetValue = adopt_CAMERA_HW_Open();
break;
inline static int adopt_CAMERA_HW_Open(void)
{
UINT32 err = 0;
KD_IMGSENSOR_PROFILE_INIT();
//power on sensor
//if ((atomic_read(&g_CamHWOpend) == 0) && (atomic_read(&g_CamHWOpend2) == 0)) {
if (atomic_read(&g_CamHWOpend) == 0 ) {
//move into SensorOpen() for 2on1 driver
// turn on power
//kdModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM*) g_invokeSocketIdx, g_invokeSensorNameStr,true, CAMERA_HW_DRVNAME);
//wait for power stable
//mDELAY(10);
//KD_IMGSENSOR_PROFILE("kdModulePowerOn");
//
if (g_pSensorFunc) {
err = g_pSensorFunc->SensorOpen();
if(ERROR_NONE != err) {
PK_DBG(" ERROR:SensorOpen(), turn off power \n");
kdModulePowerOn((CAMERA_DUAL_CAMERA_SENSOR_ENUM*) g_invokeSocketIdx, g_invokeSensorNameStr, false, CAMERA_HW_DRVNAME1);
}
}
else {
PK_DBG(" ERROR:NULL g_pSensorFunc\n");
}
KD_IMGSENSOR_PROFILE("SensorOpen");
}
else {
//PK_ERR("adopt_CAMERA_HW_Open Fail, g_CamHWOpend = %d,g_CamHWOpend2 = %d\n ",atomic_read(&g_CamHWOpend),atomic_read(&g_CamHWOpend2) );
PK_ERR("adopt_CAMERA_HW_Open Fail, g_CamHWOpend = %d\n ",atomic_read(&g_CamHWOpend) );
}
if (err == 0 ) {
atomic_set(&g_CamHWOpend, 1);
//atomic_set(&g_CamHWOpend2, 1);
}
return err?-EIO:err;
} /* adopt_CAMERA_HW_Open() */
UINT32 GC2035_YUV_SensorInit(PSENSOR_FUNCTION_STRUCT *pfFunc)
{
/* To Do : Check Sensor status here */
if (pfFunc!=NULL)
*pfFunc=&SensorFuncGC2035;
return ERROR_NONE;
} /* Sensor
SENSOR_FUNCTION_STRUCT SensorFuncGC2035=
{
GC2035Open,
GC2035GetInfo,
GC2035GetResolution,
GC2035FeatureControl,
GC2035Control,
GC2035Close
};
GC2035Open:
UINT32 GC2035Open(void)
{
volatile signed char i;
kal_uint16 sensor_id=0;
zoom_factor = 0;
Sleep(10);
SENSORDB("GC2035Open\r\n");
// Read sensor ID to adjust I2C is OK?
for(i=0;i<3;i++)
{
sensor_id = (GC2035_read_cmos_sensor(0xf0) << 8) | GC2035_read_cmos_sensor(0xf1);
if(sensor_id != GC2035_SENSOR_ID) // GC2035_SENSOR_ID = 0x2035
{
return ERROR_SENSOR_CONNECT_FAIL;
}
}
SENSORDB("GC2035 Sensor Read ID OK \r\n");
GC2035_Sensor_Init();
GC2035_Write_More();
Preview_Shutter =GC2035_read_shutter();
return ERROR_NONE;
}
GC2035GetInfo:
UINT32 GC2035GetInfo(MSDK_SCENARIO_ID_ENUM ScenarioId,
MSDK_SENSOR_INFO_STRUCT *pSensorInfo,
MSDK_SENSOR_CONFIG_STRUCT *pSensorConfigData)
{
pSensorInfo->SensorPreviewResolutionX=GC2035_IMAGE_SENSOR_PV_WIDTH;
pSensorInfo->SensorPreviewResolutionY=GC2035_IMAGE_SENSOR_PV_HEIGHT;
pSensorInfo->SensorFullResolutionX=GC2035_IMAGE_SENSOR_FULL_WIDTH;
pSensorInfo->SensorFullResolutionY=GC2035_IMAGE_SENSOR_FULL_HEIGHT;
pSensorInfo->SensorCameraPreviewFrameRate=30;
pSensorInfo->SensorVideoFrameRate=30;
pSensorInfo->SensorStillCaptureFrameRate=10;
pSensorInfo->SensorWebCamCaptureFrameRate=15;
pSensorInfo->SensorResetActiveHigh=FALSE;
pSensorInfo->SensorResetDelayCount=1;
pSensorInfo->SensorOutputDataFormat=SENSOR_OUTPUT_FORMAT_YUYV;
pSensorInfo->SensorClockPolarity=SENSOR_CLOCK_POLARITY_LOW; /*??? */
pSensorInfo->SensorClockFallingPolarity=SENSOR_CLOCK_POLARITY_LOW;
pSensorInfo->SensorHsyncPolarity = SENSOR_CLOCK_POLARITY_LOW;
pSensorInfo->SensorVsyncPolarity = SENSOR_CLOCK_POLARITY_LOW;
pSensorInfo->SensorInterruptDelayLines = 1;
pSensorInfo->CaptureDelayFrame = 4;
pSensorInfo->PreviewDelayFrame = 1; // 2 betty
pSensorInfo->VideoDelayFrame = 0;
pSensorInfo->SensorMasterClockSwitch = 0;
pSensorInfo->SensorDrivingCurrent = ISP_DRIVING_6MA;
pSensorInfo->SensroInterfaceType=SENSOR_INTERFACE_TYPE_PARALLEL;
SENSORDB("GC2035GetInfo\r\n");
switch (ScenarioId)
{
case MSDK_SCENARIO_ID_CAMERA_PREVIEW:
case MSDK_SCENARIO_ID_VIDEO_PREVIEW:
pSensorInfo->SensorClockFreq=22;
pSensorInfo->SensorClockDividCount=3;
pSensorInfo->SensorClockRisingCount= 0;
pSensorInfo->SensorClockFallingCount= 2;
pSensorInfo->SensorPixelClockCount= 3;
pSensorInfo->SensorDataLatchCount= 2;
pSensorInfo->SensorGrabStartX = 2;
pSensorInfo->SensorGrabStartY = 2;
break;
case MSDK_SCENARIO_ID_CAMERA_CAPTURE_JPEG:
pSensorInfo->SensorClockFreq=22;
pSensorInfo->SensorClockDividCount=3;
pSensorInfo->SensorClockRisingCount= 0;
pSensorInfo->SensorClockFallingCount= 2;
pSensorInfo->SensorPixelClockCount= 3;
pSensorInfo->SensorDataLatchCount= 2;
pSensorInfo->SensorGrabStartX = 2;
pSensorInfo->SensorGrabStartY = 2;
break;
default:
pSensorInfo->SensorClockFreq=22;
pSensorInfo->SensorClockDividCount=3;
pSensorInfo->SensorClockRisingCount=0;
pSensorInfo->SensorClockFallingCount=2;
pSensorInfo->SensorPixelClockCount=3;
pSensorInfo->SensorDataLatchCount=2;
pSensorInfo->SensorGrabStartX = 2;
pSensorInfo->SensorGrabStartY = 2;
break;
}
memcpy(pSensorConfigData, &GC2035SensorConfigData, sizeof(MSDK_SENSOR_CONFIG_STRUCT));
return ERROR_NONE;
}
GC2035GetResolution:
UINT32 GC2035GetResolution(MSDK_SENSOR_RESOLUTION_INFO_STRUCT *pSensorResolution)
{
SENSORDB("GC2035GetResolution\r\n");
pSensorResolution->SensorFullWidth=GC2035_IMAGE_SENSOR_FULL_WIDTH - 2 * IMAGE_SENSOR_START_GRAB_X;
pSensorResolution->SensorFullHeight=GC2035_IMAGE_SENSOR_FULL_HEIGHT - 2 * IMAGE_SENSOR_START_GRAB_Y;
pSensorResolution->SensorPreviewWidth=GC2035_IMAGE_SENSOR_PV_WIDTH - 2 * IMAGE_SENSOR_START_GRAB_X;
pSensorResolution->SensorPreviewHeight=GC2035_IMAGE_SENSOR_PV_HEIGHT - 2 * IMAGE_SENSOR_START_GRAB_Y;
pSensorResolution->SensorVideoWidth=GC2035_IMAGE_SENSOR_PV_WIDTH - 2 * IMAGE_SENSOR_START_GRAB_X;
pSensorResolution->SensorVideoHeight=GC2035_IMAGE_SENSOR_PV_HEIGHT - 2 * IMAGE_SENSOR_START_GRAB_Y;
return ERROR_NONE;
}
GC2035FeatureControl:
UINT32 GC2035FeatureControl(MSDK_SENSOR_FEATURE_ENUM FeatureId,
UINT8 *pFeaturePara,UINT32 *pFeatureParaLen)
{
UINT16 *pFeatureReturnPara16=(UINT16 *) pFeaturePara;
UINT16 *pFeatureData16=(UINT16 *) pFeaturePara;
UINT32 *pFeatureReturnPara32=(UINT32 *) pFeaturePara;
UINT32 *pFeatureData32=(UINT32 *) pFeaturePara;
MSDK_SENSOR_CONFIG_STRUCT *pSensorConfigData=(MSDK_SENSOR_CONFIG_STRUCT *) pFeaturePara;
MSDK_SENSOR_REG_INFO_STRUCT *pSensorRegData=(MSDK_SENSOR_REG_INFO_STRUCT *) pFeaturePara;
switch (FeatureId)
{
case SENSOR_FEATURE_GET_RESOLUTION:
*pFeatureReturnPara16++=GC2035_IMAGE_SENSOR_FULL_WIDTH;
*pFeatureReturnPara16=GC2035_IMAGE_SENSOR_FULL_HEIGHT;
*pFeatureParaLen=4;
break;
case SENSOR_FEATURE_GET_PERIOD:
*pFeatureReturnPara16++=GC2035_IMAGE_SENSOR_PV_WIDTH;
*pFeatureReturnPara16=GC2035_IMAGE_SENSOR_PV_HEIGHT;
*pFeatureParaLen=4;
break;
case SENSOR_FEATURE_GET_PIXEL_CLOCK_FREQ:
//*pFeatureReturnPara32 = GC2035_sensor_pclk/10;
*pFeatureParaLen=4;
break;
case SENSOR_FEATURE_SET_ESHUTTER:
break;
case SENSOR_FEATURE_SET_NIGHTMODE:
GC2035_night_mode((BOOL) *pFeatureData16);
break;
case SENSOR_FEATURE_SET_GAIN:
case SENSOR_FEATURE_SET_FLASHLIGHT:
break;
case SENSOR_FEATURE_SET_ISP_MASTER_CLOCK_FREQ:
GC2035_isp_master_clock=*pFeatureData32;
break;
case SENSOR_FEATURE_SET_REGISTER:
GC2035_write_cmos_sensor(pSensorRegData->RegAddr, pSensorRegData->RegData);
break;
case SENSOR_FEATURE_GET_REGISTER:
pSensorRegData->RegData = GC2035_read_cmos_sensor(pSensorRegData->RegAddr);
break;
case SENSOR_FEATURE_GET_CONFIG_PARA:
memcpy(pSensorConfigData, &GC2035SensorConfigData, sizeof(MSDK_SENSOR_CONFIG_STRUCT));
*pFeatureParaLen=sizeof(MSDK_SENSOR_CONFIG_STRUCT);
break;
case SENSOR_FEATURE_SET_CCT_REGISTER:
case SENSOR_FEATURE_GET_CCT_REGISTER:
case SENSOR_FEATURE_SET_ENG_REGISTER:
case SENSOR_FEATURE_GET_ENG_REGISTER:
case SENSOR_FEATURE_GET_REGISTER_DEFAULT:
case SENSOR_FEATURE_CAMERA_PARA_TO_SENSOR:
case SENSOR_FEATURE_SENSOR_TO_CAMERA_PARA:
case SENSOR_FEATURE_GET_GROUP_INFO:
case SENSOR_FEATURE_GET_ITEM_INFO:
case SENSOR_FEATURE_SET_ITEM_INFO:
case SENSOR_FEATURE_GET_ENG_INFO:
break;
case SENSOR_FEATURE_GET_GROUP_COUNT:
*pFeatureReturnPara32++=0;
*pFeatureParaLen=4;
break;
case SENSOR_FEATURE_GET_LENS_DRIVER_ID:
// get the lens driver ID from EEPROM or just return LENS_DRIVER_ID_DO_NOT_CARE
// if EEPROM does not exist in camera module.
*pFeatureReturnPara32=LENS_DRIVER_ID_DO_NOT_CARE;
*pFeatureParaLen=4;
break;
case SENSOR_FEATURE_CHECK_SENSOR_ID:
GC2035_GetSensorID(pFeatureData32);
break;
case SENSOR_FEATURE_SET_YUV_CMD:
//printk("GC2035 YUV sensor Setting:%d, %d \n", *pFeatureData32, *(pFeatureData32+1));
GC2035YUVSensorSetting((FEATURE_ID)*pFeatureData32, *(pFeatureData32+1));
break;
case SENSOR_FEATURE_SET_VIDEO_MODE:
GC2035YUVSetVideoMode(*pFeatureData16);
break;
default:
break;
}
return ERROR_NONE;
}
GC2035Control:
UINT32 GC2035Control(MSDK_SCENARIO_ID_ENUM ScenarioId, MSDK_SENSOR_EXPOSURE_WINDOW_STRUCT *pImageWindow,
MSDK_SENSOR_CONFIG_STRUCT *pSensorConfigData)
{
switch (ScenarioId)
{
case MSDK_SCENARIO_ID_CAMERA_PREVIEW:
case MSDK_SCENARIO_ID_VIDEO_PREVIEW:
GC2035_sensor_cap_zsd = KAL_FALSE;
GC2035Preview(pImageWindow, pSensorConfigData);
break;
case MSDK_SCENARIO_ID_CAMERA_CAPTURE_JPEG:
GC2035_sensor_cap_zsd = KAL_FALSE;
GC2035Capture(pImageWindow, pSensorConfigData);
break;
case MSDK_SCENARIO_ID_CAMERA_ZSD:
GC2035_sensor_cap_zsd = KAL_TRUE;
GC2035Capture(pImageWindow, pSensorConfigData);
break;
default:
break;
}
return TRUE;
}
GC2035Close:
UINT32 GC2035Close(void)
{
// CISModulePowerOn(FALSE);
SENSORDB("GC2035Close\r\n");
return ERROR_NONE;
}
到这来MTK的camera驱动的加载就结束了,但这只是在整个android中对camera架构中最基础的一些分析,android系统中camera还有很多十分复杂的东西,例如ISP,上层图像的形成,camera数据的传输等等。