解读Android 4.0 Camera原生应用程序的设计思路
http://my.oschina.net/jerikc/blog/90791
1. 设置摄像头方向
2. 打开线程与预览线程
3. 设置参数
4. Camera外设按键
5. 自动对焦与触摸对焦
6. 拍照
7. 人脸检测
8. 位置管理
9. 旋转管理
10. 变焦
11. 录像
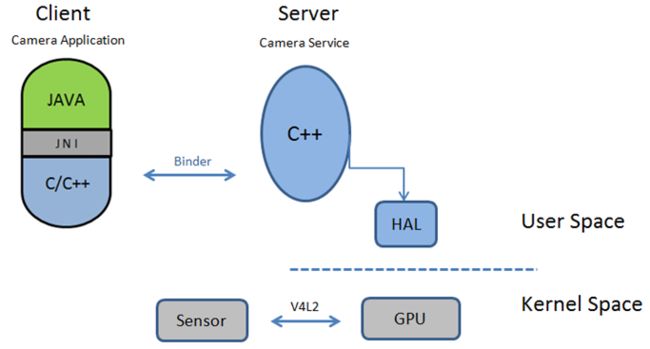
Camera的架构为典型的C/S架构,Client端,用户的行为,是为应用程序进程,Server端,设备的功能,是为Camera服务守护进 程,客户端进程承载用户的需求,由Binder进程间通信送往服务端实现设备的功能,服务端由回调函数和消息机制反馈数据返还给用户。
ps查看进程,类似 com.android.camera是为客户端Camera进程,/system/bin/mediaserver是为服务端守护进程,由系统启动时开启。
1. 设置摄像头方向
Framework框架层的Camera对象(camera.java)里有一个类class CameraInfo,里面存放了两个公有成员变量facing和orientation,即我们要讨论的前后置和方向。 程序第一次初始化时initializeFirstTime(),通过getCameraInfo()得到前后置和方向的信息,客户端发送请求 getCameraInfo()询问服务端,服务端调用抽象层拿数据,抽象层参考底层camera sensor驱动的数据facing和orientation,这两个值在驱动里是写死的,不能由用户改变,camera程序启动以后就把它们作为全局变 量存放起来。
1.1 前置与后置
后置back camera背对手机屏幕,朝外,像素高,前置front camera,面对自己,朝内,像素低。
1.2 方向
摄像头模组有长边和短边,比如采集图像的比例为4:3,那么4为长边,3为短边。设备屏幕也有长边和短边,理论上,摄像头模组的长边不能与屏幕的长边垂直,至于为什么呢,我语文水平太差,没办法很好地表达出来...总之目的就是为了显示效果。
2 打开线程与预览线程
onCreate()里会先后开启CameraOpenThread和CameraPreviewThread。
打开camera还需要线程?CameraOpenThread名为打开,实为C/S connect连接服务端,binder进程间通信,开销较大。预览线程必须在打开线程完成以后执行,它贯穿始终直到进程消亡为止,整个预览过程相对复 杂,在抽象层和底层驱动实现,概括讲,预览线程再开启两个线程,一个拿sensor的frame,一个送往framebuffer经 surfaceflinger显示出来。
3 设置参数
预览拍照录像之前,用户需要设置很多参数,比如闪光,白平衡,场景,对比度等。
程序里这些参数保存在SharedPreferences共享优选项和Parameters两个地方,Preferences包含 Parameters,打开程序读取优选项参数,关闭程序保存优选项参数,考虑到用户经常会调整参数,引入Parameters来保存从打开以后到关闭以 前这个中间过程的参数变量,Parameters的键值由抽象层根据硬件sensor的能力决定。
4. Camera外设按键
Manifest里注册broadcast receiver,
有些手机上有camera按键,用户按下按键,android输入系统有两种实现方法,
1)发送广播CAMERA_BUTTON,收到广播后开启主Activity。
2)上报键值KEYCODE_CAMERA,程序收到消息,可自定义实现功能,比如拍照。
public boolean onKeyDown(int keyCode, KeyEvent event) {
switch (keyCode) {
case KeyEvent.KEYCODE_CAMERA:
if (mFirstTimeInitialized && event.getRepeatCount() == 0) {
onShutterButtonClick();
}
return true;
5. 自动对焦与触摸对焦
外界事物由光线经凸透镜聚焦到sensor上成像,camera模组开启马达前后平移镜头取得最佳成像效果,这个过程称之为对焦。
5.1 自动对焦
1) camera模组会因感光强度变化而自动开启对焦,驱动控制。
2) 用户长按快门,软件控制自动对焦。
3) 用户按下快门拍照,拍摄前自动对焦。
程序里,Camera对象实现类ShutterButton的接口OnShutterButtonListener里的方法 onShutterButtonFocus(boolean pressed)和onShutterButtonClick(),后者是拍照,下节讨论,先看 onShutterButtonFocus(boolean pressed),这个pressed判断是否为一次有效的长按,如果是的话,执行autoFocus(),这个autoFocus()也是Camera 对象实现类FocusManager的接口Listener里的方法,由binder交给camera service,最后在底层驱动实现自动对焦。
5.2 触摸对焦
自动对焦的对焦区域位于屏幕正中,用户也可触摸特定区域对焦。
Camera对象实现类View的接口OnTouchListener里的方法onTouch(),输入系统上报MotionEvent的xy坐标,保存在Parameters,执行autoFocus(),抽象层读取Paramters的触摸点坐标,实现区域对焦。
6. 拍照
拍照分四步,对焦,拍照,接收图片,保存图片。
mCameraDevice.takePicture(mShutterCallback, mRawPictureCallback,
mPostViewPictureCallback, new JpegPictureCallback(loc));
需要理解四个回调函数,参考上一篇文章。
1)对焦
拍照前如果已经区域对焦,则取消自动对焦,反之,开启一次自动对焦。对焦完成后,底层发送对焦成功与否的消息给camera对 象,FocusManager把状态mState保存起来,如果正在对焦未完成(mState == STATE_FOCUSING)则不可拍照,直到对焦完毕。
2)拍照
onShutterButtonClick() -> doSnap() -> capture() -> takePicture(),具体实现在抽象层和底层驱动,实质就是拿一张预览的图像,抽象层读取拍照时的Parameters参数配置,包括用户选择的 照片大小。
3)接收图片
通过回调,由底层发送图片给camera对象。
RawPictureCallback,得到原始图片,需要软件压缩Jpeg。(YUV转Jpeg)
JpegPictureCallback,直接得到Jpeg图片,需要硬件压缩Jpeg。
PostViewPictureCallback,拍完后预览图片。
4)保存图片
交由线程ImageSaver保存图片和生成thumbnails。
默认路径位于/mnt/sdcard/DCIM/Camera/
7. 人脸检测
人脸检测可以软件实现,可以硬件实现,软件实现增加CPU开销,硬件实现增大耗电,鼓励硬件实现...
上层Camera对象实现了 framework层Camera的接口FaceDetectionListener的方法onFaceDetection(Face[] faces, Camera camera),回调机制同上,硬件sensor识别脸部信息,发送face给camera对象,framework定义face的特征,比如眼睛,嘴 巴,上层保存mFaces数据,更新UI。
8. 位置管理
位置管理LocationManager用来记录拍摄图片的GPS位置信息(经维度),存入JPEG头部插入的Exif里。
用户在菜单“相机设置”里的"保存所在位置"选择打开(前提是GPS已开启),屏幕左上方会出现一个GPS图标,表示现在可以记录GPS信息了。
程序里,Camera对象实现了位置管理监听器LocationManager.Listener的接口showGpsOnScreenIndicator()和hideGpsOnScreenIndicator(),显示或者隐藏GPS图标。
程序第一次初始化时initializeFirstTime(),通过读取优选项Preference得到bool值 recordLocation,判断是否需要记录GPS信息,如果需要,在拍照capture()里调用LocationManager的方法得到 Location loc,并将其存入Exif。
9. 旋转管理
假设一台手机,camera正常安装,竖直方向作为默认方向(orientation == 0)拍摄照片,即拍摄“肖像照”(portrait),得到的照片显示在屏幕上也是竖直方向。
如果把手机旋转90度水平过来拍摄“山水照”(landscape),对于camera sensor来说,没有旋转的概念,所以软件上要把图片旋转90度回来。

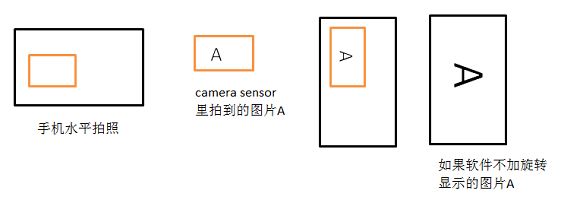
软件上,需要借助方向监听器随时更新方向信息,并保存在Parameters里,抽象层实现拍照功能时从Parameters里读取方向。
具体的,camera对象内部类MyOrientationEventListener的方法onOrientationChanged()保存方 向orientation的值,MyOrientationEventListener继承 OrientationEventListener,OrientationEventListener的onSensorChanged()把从 sensorManager拿到的xyz坐标转换成方向。
程序启动,注册sensor监听器并使能,sensorManager不断上报底层sensor数据,通过消息机制发送到camera对象,后者计 算坐标数据得到方向orientation的值(实际外包给orientationListener完成),最后保存Parameters。
10. 变焦
用户拖动Zoom横条可放大缩小预览画面连续变焦,另一种所谓状态变焦,其原理是一样的。
camera对象的内部类ZoomChangeListener实现ZoomControl的方法,实质是把变焦的任务全权交给 ZoomControl。ZoomControl监听处理用户的触摸事件dispatchTouchEvent(),用来得到并处理变焦倍数 mListener.onZoomValueChanged(index),它由mCameraDevice.startSmoothZoom()通过 binder交给camera service,camera service再通过sendComand命令机制交给抽象层实现变焦,抽象层开启变焦线程,变焦改变预览,通过回调机制发送消息 CAMERA_MSG_ZOOM把变焦倍数返还给camera对象,最终camera对象收到消息 后,ZoomListener.onZoomChange()把变焦倍数保存到Parameters.
11. 录像
ModePicker负责切换模式,一共有三种模式,普通模式,录像模式和全景模式,Manifest里依次声明这三个activity。
切换模式,销毁原有activity,开启新activity,伴随关闭preview,重启preview,保存配置,读取配置,开销很大。
录像VideoCamera.java同预览Camera.java的思路类似,按下录像按钮,程序监听用户事件,开启录像,录像交给MediaRecoder,StagefrightRecorder负责。
1. Overview
1.1 物理架构
1.2 Android架构
2. CameraService
3. HAL
4. Overlay
5. Video for Linux
1. Overview
本文以Freescale IMX为例剖析camera摄像头的系统架构。
1.1 物理架构
硬件方面,camera系统分为主控制器和摄像头设备,功能上主要有preview预览,takePicture拍照和recording录像。
1) IPU - Image Process Unit 图像处理单元,用于控制摄像机和显示屏。
2)图像采集 - 由camera采集的图像数据信息通过IPU的CSI接口控制。
3)DMA映射到内存 - IPU将采集到得数据通过DMA映射到一段内存。
4)队列机制 - 为了更高效地传送数据,将内存中的数据取出加入一队列,并传送到另一队列。
5)视频输出 - 将视频数据从队列中取出,通过IPU控制这段独立显存,最终将视频显示出来。
1.2 Android架构
Android的camera系统架构自上而下分别为应用层-框架层-硬件抽象层-linux驱动层。
1) APP - Framework
应用层与java框架层的间主要由Binder机制进行通信。
系统初始化时会开启一个CameraService的守护进程,为上层应用提供camera对的功能接口。
2) Framework - HAL
框架层与硬件抽象层间通过回调函数传递数据。
3) Overlay
Overlay层由ServiceFlinger和OverlayHal组成,实现视频输出功能,只有camera框架层或者视频框架层能调用它,上层无法直接调用。
4) HAL - driver
抽象层位于用户空间,通过系统调用如open(),read(),ioctl()等与内核空间进行数据传递。
2 CameraService
Camera的主要功能有取景Preview,拍照takePicture和摄影Recording,下文以取景为例,剖析camera系统架构。
要实现取景Preview功能,主要须调用CameraService::Client::startPreview()和 CameraService::Client::setOverlay(),前者通过mHardware->startPreview();调用 cameraHal硬件抽象层以实现取景的整个流程,后者通过mSurface->createOverlay();调用 surfaceFlinger层创建overlay_object对象。
3 HAL
startPreview主要完成三项任务,配置图象,配置内存,开启两个存取buf队列的线程。
1) cameraPreviewConfig()配置预览图象参数
CameraOpen() - 通过打开设备节点/dev/video0得以由系统接口与设备驱动交互。
S_FMT - ioctl()的指令,设置图象像素格式,将数据由硬件抽象层传递至Linux驱动,这里也就是v4l2。
G_FMT - 得到图象像素格式,将数据由底层驱动v4l2返回至硬件抽象层。
S_PARM - 设置模式的指令,这个指令传到底层后,将会实现对camera硬件的控制。
2) cameraPreviewStart()开启预览,实际上配置了内存
REQBUFS - 申请内存,通过dma_alloc_coherent()为camera申请一端连续的dma内存。
QUERYBUF - 询问内存,将申请到内存的物理地址,虚拟地址等数据从内核空间传递到用户空间。
QBUF - 加入队列,将通过询问得到的buf加入一个队列。
3) PreviewShowFrameThread()和PreviewShowFrameThread()
PreviewCaptureFrameThread()捕捉一帧数据的线程,通过DQBUF,从队列中取出一个buf数据,这里,一个buf即一帧数据即一张图片。注意,如果camera没有采集到图片,这个线程会在DQBUF阻塞。
PreviewShowFrameThread()显示一帧数据的线程。
mDataCb() - 回调函数,将采集到的图象数据传回CameraService,再由CameraService传递给上层应用。
mOverlay->dequeueBuffer() - 调用Overlay层,从Overlay层得到一个空闲的overlaybuffer,将图象数据拷贝到这个buffer里。至于这个buffer后续的工作,即视频输出,则交给了Overlay去完成。
QUERYBUF & QBUF - 由于已经从队列里取出了一个buf,需要再询问并加入另一个buf到队列里。
4) Overlay
CameraService::Client::startPreview()完成mHardware->startPreview();后 便去执行CameraService::Client::setOverlay(),如果没有任何overlay,则创建一个新的,通过 mHardware->setOverlay(new Overlay(mOverlayRef))调用到SurfaceFlinger层,再由 overlay_dev->createOverlay();调用到overlay的硬件抽象层,抽象层创建并初始化overlay对象,与 cameraHal类似,通过ioctl()指令与底层v4l2通信,配置视频参数和内存空间。随后开启一个overlay线程,用于存取队列中的视频数 据。
注意,SurfaceFlinger里也会开启一个处理overlay的surfaceFlinger线程,用于等待用户事件,作相应的overlay控制。
5 Video for Linux
v4l2 - video for linux 2是linux为视频驱动抽象出的一层统一的接口,数据结构如下,
v4l2作为master主设备由(*attach)与camera从设备进行绑定。
初始化函数probe()如下,
1) init_camera_struct()初始化v4l2主设备的数据结构,实现open(), read(), ioctl(), mmap()等操作。
2) v4l2_int_device_register(),注册v4l2主设备,绑定camera从设备。
3) video_register_device()注册linux video设备,建立/dev/video0设备节点。