ARM主站-CANopenIO模块设计过程
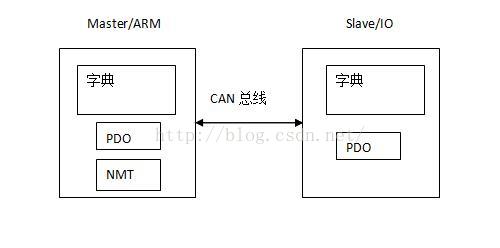
第一、总设计图
第二、主站(arm)需要做的工作
1、参考canfestival源码example目录下的历程,如DS401.
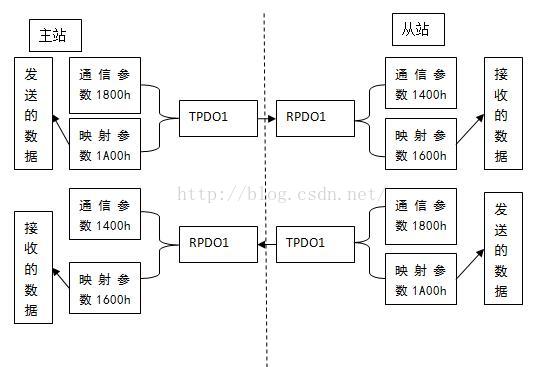
2、配置主站字典,设置主站PDO1的通信参数
3、配置从站字典,通过SDO配置从站PDO1的通信参数,配置传输类型为同步传输,COBID为主站PDO1对应的COBID;关闭从站的PDO2,PDO3,PDO4。
4、修改主站的对象字典,把PDO1的接收和发送参数映射到厂家自定义的区域,方便程序的读取和修改。
5、发送START的NMT指令,让从站开始运行,此时主从站的PDO1通信已经建立起来。
6、交叉编译或者arm本机编译canfestival源码,编译过程见http://blog.csdn.net/eliot_shao/article/details/49838691
7、将编译好的文件,包含bin和.a文件,拷贝到target board,运行。
第三、一对主从站的PDO1的同步通信的模型
第四、总结
CANfestival很强大,开源代码提供了SDO的操作方法,修改配置从站的对象字典是关键。同时它也具备了图形界面修改编辑字典的优势,使主站设计更加方便。在源码中提供的操作DS401的例程,极大的缩短了主从站建立CANopen通信的开发周期。
PDO传输的“总指挥”就是对象字典。PDO发送什么数据,接收什么数据,什么时候发送和接收,发送和接收的数据都放在哪儿,都是由对象字典配置。从CAN控制器看来就是一串帧的交互。
NMT是主站用来控制从站的状态的,比如START、STOP等。由主站发起。
SDO是配置主从站对象字典的工具。由主站发起。
第五、附录TestMasterMicroMod.c代码
这个例子列出了主站设计的流程,注意在void TestMaster_post_sync(CO_Data* d)函数里的DO和DI变量是在字典的映射区定义的,用于和从设备交换PDO数据。
/*
This file is part of CanFestival, a library implementing CanOpen Stack.
Copyright (C): Edouard TISSERANT and Francis DUPIN
See COPYING file for copyrights details.
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA
*/
#if defined(WIN32) && !defined(__CYGWIN__)
#include
#include "getopt.h"
void pause(void)
{
system("PAUSE");
}
#else
#include
#include
#include
#include
#include
#endif
#include "canfestival.h"
#include "TestMasterMicroMod.h"
#include "TestMaster.h"
unsigned int slavenodeid = 0x40;
/*****************************************************************************/
void TestMaster_heartbeatError(CO_Data* d, UNS8 heartbeatID)
{
eprintf("TestMaster_heartbeatError %d\n", heartbeatID);
}
/********************************************************
* ConfigureSlaveNode is responsible to
* - setup master RPDO 1 to receive TPDO 1 from id 0x40
* - setup master TPDO 1 to send RPDO 1 to id 0x40
********************************************************/
void TestMaster_initialisation(CO_Data* d)
{
UNS32 PDO1_COBID = 0x0180 + slavenodeid; //TPDO1
UNS32 PDO2_COBID = 0x0200 + slavenodeid;//RPDO1
UNS32 size = sizeof(UNS32);
eprintf("TestMaster_initialisation\n");
/*****************************************
* Define RPDOs to match slave ID=0x40 TPDOs*
*****************************************/
writeLocalDict( &TestMaster_Data, /*CO_Data* d*/
0x1400, /*UNS16 index*/
0x01, /*UNS8 subindex*/
&PDO1_COBID, /*void * pSourceData,*/
&size, /* UNS8 * pExpectedSize*/
RW); /* UNS8 checkAccess */
/*****************************************
* Define TPDOs to match slave ID=0x40 RPDOs*
*****************************************/
writeLocalDict( &TestMaster_Data, /*CO_Data* d*/
0x1800, /*UNS16 index*/
0x01, /*UNS8 subind*/
&PDO2_COBID, /*void * pSourceData,*/
&size, /* UNS8 * pExpectedSize*/
RW); /* UNS8 checkAccess */
}
static int init_step = 0;
/*Froward declaration*/
static void ConfigureSlaveNode(CO_Data* d, UNS8 nodeId);
/**/
static void CheckSDOAndContinue(CO_Data* d, UNS8 nodeId)
{
UNS32 abortCode;
if(getWriteResultNetworkDict (d, nodeId, &abortCode) != SDO_FINISHED)
eprintf("Master : Failed in initializing slave %2.2x, step %d, AbortCode :%4.4x \n", nodeId, init_step, abortCode);
/* Finalise last SDO transfer with this node */
closeSDOtransfer(&TestMaster_Data, nodeId, SDO_CLIENT);
ConfigureSlaveNode(d, nodeId);
}
/********************************************************
* ConfigureSlaveNode is responsible to
* - setup slave TPDO 1 transmit time
* - setup slave TPDO 2 transmit time
* - setup slave Heartbeat Producer time
* - switch to operational mode
* - send NMT to slave
********************************************************
* This an example of :
* Network Dictionary Access (SDO) with Callback
* Slave node state change request (NMT)
********************************************************
* This is called first by TestMaster_preOperational
* then it called again each time a SDO exchange is
* finished.
********************************************************/
static void ConfigureSlaveNode(CO_Data* d, UNS8 nodeId)
{
UNS8 res;
eprintf("Master : ConfigureSlaveNode %2.2x\n", nodeId);
switch(++init_step){
case 1:
{ /*disable Slave's TPDO 1 */
UNS32 TPDO_COBId = 0x80000180 + nodeId;
eprintf("Master : disable slave %2.2x TPDO 1 \n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1800, /*UNS16 index*/
0x01, /*UNS8 subindex*/
4, /*UNS8 count*/
0, /*UNS8 dataType*/
&TPDO_COBId,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 2:
{ /*setup Slave's TPDO 1 to be transmitted on SYNC*/
UNS8 Transmission_Type = 0x01;
eprintf("Master : set slave %2.2x TPDO 1 transmit type\n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1800, /*UNS16 index*/
0x02, /*UNS8 subindex*/
1, /*UNS8 count*/
0, /*UNS8 dataType*/
&Transmission_Type,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 3:
{ /*re-enable Slave's TPDO 1 */
UNS32 TPDO_COBId = 0x00000180 + nodeId;
eprintf("Master : re-enable slave %2.2x TPDO 1\n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1800, /*UNS16 index*/
0x01, /*UNS8 subindex*/
4, /*UNS8 count*/
0, /*UNS8 dataType*/
&TPDO_COBId,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 4:
{ /*disable Slave's RPDO 1 */
UNS32 TPDO_COBId = 0x80000200 + nodeId;
eprintf("Master : disable slave %2.2x RPDO 1\n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1400, /*UNS16 index*/
0x01, /*UNS8 subindex*/
4, /*UNS8 count*/
0, /*UNS8 dataType*/
&TPDO_COBId,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 5:
{
UNS8 Transmission_Type = 0x01;
eprintf("Master : set slave %2.2x RPDO 1 receive type\n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1400, /*UNS16 index*/
0x02, /*UNS8 subindex*/
1, /*UNS8 count*/
0, /*UNS8 dataType*/
&Transmission_Type,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 6:
{ /*re-enable Slave's RPDO 1 */
UNS32 TPDO_COBId = 0x00000200 + nodeId;
eprintf("Master : re-enable %2.2x RPDO 1\n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1400, /*UNS16 index*/
0x01, /*UNS8 subindex*/
4, /*UNS8 count*/
0, /*UNS8 dataType*/
&TPDO_COBId,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 7:
{
/*set the heartbeat Producer Time*/
UNS16 Heartbeat_Producer_Time = 0x03E8;
eprintf("Master : set slave %2.2x heartbeat producer time \n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1017, /*UNS16 index*/
0x00, /*UNS8 subindex*/
2, /*UNS8 count*/
0, /*UNS8 dataType*/
&Heartbeat_Producer_Time,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 8:
{ /*disable Slave's TPDO 2 */
UNS32 TPDO_COBId = 0x80000280 + nodeId;
eprintf("Master : disable slave %2.2x TPDO 2 \n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1801, /*UNS16 index*/
0x01, /*UNS8 subindex*/
4, /*UNS8 count*/
0, /*UNS8 dataType*/
&TPDO_COBId,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 9:
{ /*disable Slave's TPDO 3 */
UNS32 TPDO_COBId = 0x80000380 + nodeId;
eprintf("Master : disable slave %2.2x TPDO 3 \n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1802, /*UNS16 index*/
0x01, /*UNS8 subindex*/
4, /*UNS8 count*/
0, /*UNS8 dataType*/
&TPDO_COBId,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 10:
{ /*disable Slave's TPDO 4 */
UNS32 TPDO_COBId = 0x80000480 + nodeId;
eprintf("Master : disable slave %2.2x TPDO 4 \n", nodeId);
res = writeNetworkDictCallBack (d, /*CO_Data* d*/
/**TestSlave_Data.bDeviceNodeId, UNS8 nodeId*/
nodeId, /*UNS8 nodeId*/
0x1803, /*UNS16 index*/
0x01, /*UNS8 subindex*/
4, /*UNS8 count*/
0, /*UNS8 dataType*/
&TPDO_COBId,/*void *data*/
CheckSDOAndContinue, /*SDOCallback_t Callback*/
0); /* use block mode */
}
break;
case 11:
/* Put the master in operational mode */
setState(d, Operational);
/* Ask slave node to go in operational mode */
masterSendNMTstateChange (d, nodeId, NMT_Start_Node);
}
}
void TestMaster_preOperational(CO_Data* d)
{
eprintf("TestMaster_preOperational\n");
ConfigureSlaveNode(&TestMaster_Data, slavenodeid);
}
void TestMaster_operational(CO_Data* d)
{
eprintf("TestMaster_operational\n");
}
void TestMaster_stopped(CO_Data* d)
{
eprintf("TestMaster_stopped\n");
}
void TestMaster_post_sync(CO_Data* d)
{
DO++;
eprintf("MicroMod Digital Out: %2.2x\n",DO);
eprintf("MicroMod Digital In (by bit): DI1: %2.2x DI2: %2.2x DI3: %2.2x DI4: %2.2x DI5: %2.2x DI6: %2.2x DI7: %2.2x DI8: %2.2x\n",DI1,DI2,DI3,DI4,DI5,DI6,DI7,DI8);
}
void TestMaster_post_TPDO(CO_Data* d)
{
// eprintf("TestMaster_post_TPDO\n");
}
s_BOARD SlaveBoard = {"0", "500K"};
//s_BOARD MasterBoard = {"0", "125K"};
#if !defined(WIN32) || defined(__CYGWIN__)
void catch_signal(int sig)
{
signal(SIGTERM, catch_signal);
signal(SIGINT, catch_signal);
eprintf("Got Signal %d\n",sig);
}
#endif
void help(void)
{
printf("**************************************************************\n");
printf("* TestMasterMicroMod *\n");
printf("* *\n");
printf("* A simple example for PC. *\n");
printf("* A CanOpen master that control a MicroMod module: *\n");
printf("* - setup module TPDO 1 transmit type *\n");
printf("* - setup module RPDO 1 transmit type *\n");
printf("* - setup module hearbeatbeat period *\n");
printf("* - disable others TPDOs *\n");
printf("* - set state to operational *\n");
printf("* - send periodic SYNC *\n");
printf("* - send periodic RPDO 1 to Micromod (digital output) *\n");
printf("* - listen Micromod's TPDO 1 (digital input) *\n");
printf("* - Mapping RPDO 1 bit per bit (digital input) *\n");
printf("* *\n");
printf("* Usage: *\n");
printf("* ./TestMasterMicroMod [OPTIONS] *\n");
printf("* *\n");
printf("* OPTIONS: *\n");
printf("* -l : Can library [\"libcanfestival_can_virtual.so\"] *\n");
printf("* *\n");
printf("* Slave: *\n");
printf("* -i : Slave Node id format [0x01 , 0x7F] *\n");
printf("* *\n");
printf("* Master: *\n");
printf("* -m : bus name [\"1\"] *\n");
printf("* -M : 1M,500K,250K,125K,100K,50K,20K,10K *\n");
printf("* *\n");
printf("**************************************************************\n");
}
/*************************** INIT *****************************************/
void InitNodes(CO_Data* d, UNS32 id)
{
/****************************** INITIALISATION MASTER *******************************/
if(MasterBoard.baudrate){
/* Defining the node Id */
setNodeId(&TestMaster_Data, 0x01);
/* init */
setState(&TestMaster_Data, Initialisation);
}
}
/*************************** EXIT *****************************************/
void Exit(CO_Data* d, UNS32 id)
{
if(strcmp(MasterBoard.baudrate, "none")){
masterSendNMTstateChange(&TestMaster_Data, 0x02, NMT_Reset_Node);
//Stop master
setState(&TestMaster_Data, Stopped);
}
}
/****************************************************************************/
/*************************** MAIN *****************************************/
/****************************************************************************/
int main(int argc,char **argv)
{
int c;
extern char *optarg;
char* LibraryPath="libcanfestival_can_virtual.so";
char *snodeid;
while ((c = getopt(argc, argv, "-m:s:M:S:l:i:")) != EOF)
{
switch(c)
{
case 'm' :
if (optarg[0] == 0)
{
help();
exit(1);
}
MasterBoard.busname = optarg;
break;
case 'M' :
if (optarg[0] == 0)
{
help();
exit(1);
}
MasterBoard.baudrate = optarg;
break;
case 'l' :
if (optarg[0] == 0)
{
help();
exit(1);
}
LibraryPath = optarg;
break;
case 'i' :
if (optarg[0] == 0)
{
help();
exit(1);
}
snodeid = optarg;
sscanf(snodeid,"%x",&slavenodeid);
break;
default:
help();
exit(1);
}
}
#if !defined(WIN32) || defined(__CYGWIN__)
/* install signal handler for manual break */
signal(SIGTERM, catch_signal);
signal(SIGINT, catch_signal);
TimerInit();
#endif
#ifndef NOT_USE_DYNAMIC_LOADING
LoadCanDriver(LibraryPath);
#endif
TestMaster_Data.heartbeatError = TestMaster_heartbeatError;
TestMaster_Data.initialisation = TestMaster_initialisation;
TestMaster_Data.preOperational = TestMaster_preOperational;
TestMaster_Data.operational = TestMaster_operational;
TestMaster_Data.stopped = TestMaster_stopped;
TestMaster_Data.post_sync = TestMaster_post_sync;
TestMaster_Data.post_TPDO = TestMaster_post_TPDO;
if(!canOpen(&MasterBoard,&TestMaster_Data)){
eprintf("Cannot open Master Board\n");
goto fail_master;
}
// Start timer thread
StartTimerLoop(&InitNodes);
// wait Ctrl-C
pause();
eprintf("Finishing.\n");
// Stop timer thread
StopTimerLoop(&Exit);
fail_master:
if(MasterBoard.baudrate) canClose(&TestMaster_Data);
TimerCleanup();
return 0;
}