语音 LMS 降噪的 C 语言源代码及其解释
最小均方 (LMS) 算法的自适应数字滤波器原理12:
设横向自适应数字滤波器的输入为 x ( n ) x(n) x(n),理想输入为 d ( n ) d(n) d(n),实际输出为 y ( n ) y(n) y(n),滤波器的加权系数为 ω i ( n ) , ( i = 0 , 1 , . . . , M − 1 ) \omega_{i}(n),(i=0,1,...,M-1) ωi(n),(i=0,1,...,M−1),那么 LMS 算法为:
y ( n ) = ∑ i = 0 M − 1 ω i ( n ) x ( n − i ) e ( n ) = d ( n ) − y ( n ) ω i ( n + 1 ) = ω i ( n ) + 2 μ e ( n ) x ( n − i ) , i = 0 , 1 , . . . , M − 1 \begin{aligned} y(n) & =\sum\limits_{i=0}^{M-1}\omega_{i}(n)x(n-i) \\ e(n) &=d(n)-y(n) \\ \omega_{i}(n+1)&=\omega_{i}(n)+2\mu e(n)x(n-i), i=0,1,...,M-1 \end{aligned} y(n)e(n)ωi(n+1)=i=0∑M−1ωi(n)x(n−i)=d(n)−y(n)=ωi(n)+2μe(n)x(n−i),i=0,1,...,M−1
其中 μ \mu μ 是收敛因子(学习率)。
MATLAB 编程
使用 matlab 对语音进行 LMS 降噪,这样的程序可以找到很多。由于 matlab 在工程方面的应用性能欠佳,最终还是使用 C 语言实现 LMS 的代码更好一些。但是为了对比,我们先写出 matlab 版本的代码,同时对该算法进行说明。
首先我们构造一个正弦信号并给它加上高斯白噪声。输入信号 x ( i ) x(i) x(i) 和理想的输出信号 d ( i ) d(i) d(i) 分别为:
d ( n ) = 2 sin 2 π i 20 + v ( i ) x ( i ) = d ( i − 1 ) \begin{aligned} d(n) & =\sqrt2 \sin \frac{2\pi i}{20}+v(i) \\ x(i) &=d(i-1) \\ \end{aligned} d(n)x(i)=2sin202πi+v(i)=d(i−1)
其中 v ( i ) v(i) v(i) 是均值为零、方差为 1 的高斯白噪声,正弦信号的数字频率为 0.05,信噪比 SNR = 1, x ( i ) x(i) x(i) 比 d ( i ) d(i) d(i) 延迟一个采样间隔。为什么要这样做呢?有一些代码中,会专门给出一个纯净的信号,并以这个纯净的信号作为参考信号。但是这在现实中是很难获得的。如果你都已经获得纯净信号了,还要滤波有什么意义?所以很多实际应用的程序里面,会将包含噪声的输入信号做延迟,并将延迟后的信号作为输入信号,而原先包含噪声的信号作为纯净信号,一样可以达到自适应滤波的效果。我们这里选取样本数 n=500,滤波器长度 m=20,收敛因子 μ = 0.0005 \mu=0.0005 μ=0.0005。
这个信号我们等会会给出构建程序,现在假定它已经被构造好,保存在了lms.txt文件中。我们就从这个文件里读取。对信号读取并处理的 MATLAB 代码如下:
close all;
clear all;
clc;
aaa = textread('lms.txt'); %读取文件
s = aaa(:,2); %这个文件中第二列才是真实的信号
s_expand=[s;0]; %在信号序列最后加一个0
r1=s_expand;
s2 =[0;s]; %在信号序列最前面加一个0,即把原始信号向后延迟1个点
M=20; % 设置M和mu,M 是滤波器阶数
mu=0.0005; % mu 是自适应滤波里面的参数
itr=length(r1);
[W,e,y2]=LMS(s2,r1,M,mu,itr);
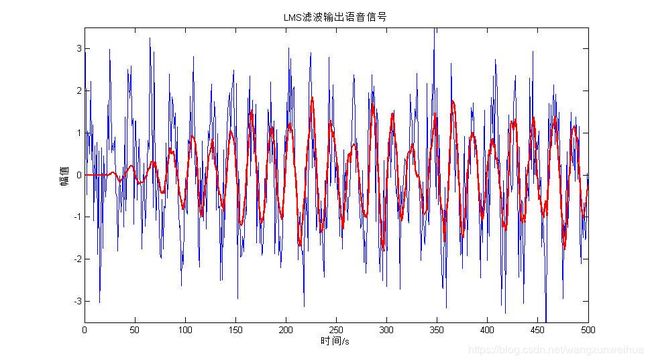
plot(s,'b','LineWidth',1); ylabel('幅值')
ylim([-3.5 3.5 ]); title('原始语音信号');
hold on;
plot(y2,'r','LineWidth',2);
ylim([-3.5 3.5 ]); title('LMS滤波输出语音信号');
xlabel('时间/s'); ylabel('幅值')
我们注意到其中使用了 LMS 函数用于滤波的处理,这个函数代码如下:
%LMS函数
function [W,en,y]=LMS(xn,dn,M,mu,itr)
% LMS(Least Mean Squre)算法
% 输入参数:
% xn 输入的信号序列 (列向量)
% dn 期望信号 (列向量)
% M 滤波器的阶数 (标量)
% mu 收敛因子(步长) (标量) 要求大于0,小于xn的相关矩阵最大特征值的倒数
% itr 迭代次数 (标量) 默认为xn的长度,M<itr<length(xn)
% 输出参数:
% W 滤波器的权值矩阵 (矩阵)
% 大小为M x itr,
% en 误差序列(itr x 1) (列向量)
% y 输出序列 (列向量)
% 初始化参数
en = zeros(itr,1); % 误差序列,en(k)表示第k次迭代时预期输出与实际输入的误差
W = zeros(M,itr); % 每一行代表一个加权参量,每一列代表-次迭代,初始为0
% 迭代计算
for k = M:(itr-1) % 第k次迭代
x = xn(k:-1:k-M+1); % 滤波器M个抽头的输入
y(k) = W(:,k).' * x; % 滤波器的输出
en(k) = dn(k) - y(k) ; % 第k次迭代的误差
% 滤波器权值计算的迭代式
W(:,k+1) = W(:,k) + 2*mu*en(k)*x;
end
滤波结果画图如下,其中蓝色曲线是滤波之前的,红色曲线是滤波之后的。可以明显看出,滤波以后噪声有所减小。
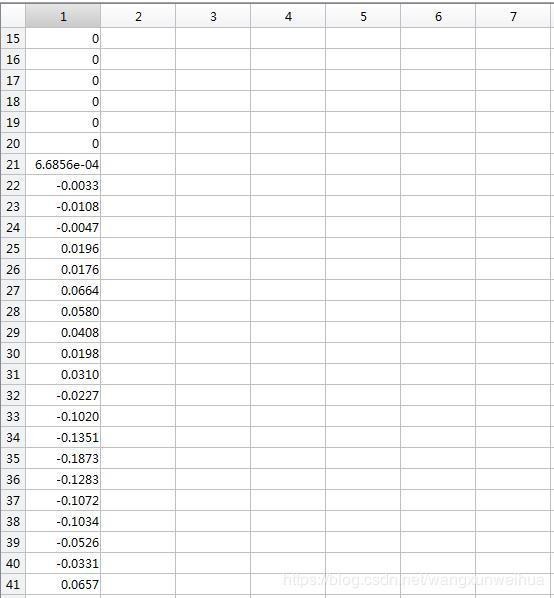
我们查看输出 y 的数据如下:
C 语言编程
上面讲解了 MATLAB 的程序,现在来介绍一下对应的 C 语言程序。上面所提到的 lms.txt 这个文件中数据的产生,也包含在本 C 语言程序中。
#include "stdio.h"
#include "stdlib.h"
#include "math.h"
#include "lms.h"
#include "gauss.h"
int main(void)
{
int i,m,n;
long seed;
double mu,pi,mean,sigma;
static double d[501],x[501],y[501],w[50];
FILE *fp;
pi = 4.0*atan(1.0);
mean = 0.0;
sigma = 1.0;
seed = 13579l;
n = 500;
for (i=0;i<n;i++)
{
d[i] = sqrt(2.0)*sin(2*pi*i/20.0);
d[i]+= gauss(mean,sigma,&seed);
}
for (i=0;i<(n-1);i++)
{
x[i+1]=d[i];
}
fp = fopen("lms.txt","w");
for (i=0;i<n;i++)
{
fprintf(fp,"%d %lf\n",i,d[i]);
}
fclose(fp);
m = 20;
mu = 0.0005;
lms(x,d,y,n,w,m,mu);
printf("\n The Coefficients of Adaptive Filter\n");
for (i=0;i<m;i+=4)
{
printf(" %10.7f %10.7f",w[i],w[i+1]);
printf(" %10.7f %10.7f",w[i+2],w[i+3]);
printf("\n");
}
fp = fopen("lmsy.txt","w");
for (i=0;i<n;i++)
{
fprintf(fp,"%d %lf\n",i,y[i]);
}
fclose(fp);
getchar();
return 0;
}
我们留意到其中有一个 gauss() 函数,这个函数就是用于产生高斯噪声的,这个函数的源代码如下:
#include "uniform.h"
double gauss(double mean, double sigma, long int* seed)
{
int i;
double x, y;
for (x=0, i=0; i<12; i++)
x += uniform(0, 1, seed);
x = x - 6;
y = mean + x * sigma;
return (y);
}
我们发现,其中又调用了 uniform 这个函数,这个函数的源代码如下:
double uniform(double a, double b, long int *seed)
{
double t;
*seed = 2045 * (*seed) + 1;
*seed = *seed - (*seed / 1048576) * 1048576;
t = (*seed) / 1048576.0;
t = a + (b - a) * t;
return (t);
}
下面给出 LMS 函数的源代码,这个源代码和 MATLAB 的代码尽可能保持一致, 方便我们进行对比。
void lms(double x[], double d[], double y[], int n, double w[], int m, double mu)
{
double e[500];
int i,k;
for (i=0;i<m;i++)
{
w[i] = 0.0;
}
/* //这一段即使不要,也可以自适应滤波
for (k=0;k
for (k=(m-1);k<n;k++) //原始程序里这里就是m,但是改成m-1好像也没问题
{
y[k] = 0.0;
for (i=0;i<m;i++)
{
y[k]+=x[k-i]*w[i];
}
e[k] = d[k]-y[k];
for (i=0;i<m;i++)
{
w[i]+=2.0*mu*e[k]*x[k-i];
}
}
}
C 语言的输出放在 lmsy.txt 这个函数中。我们打开这个文件,看到其中的数据:
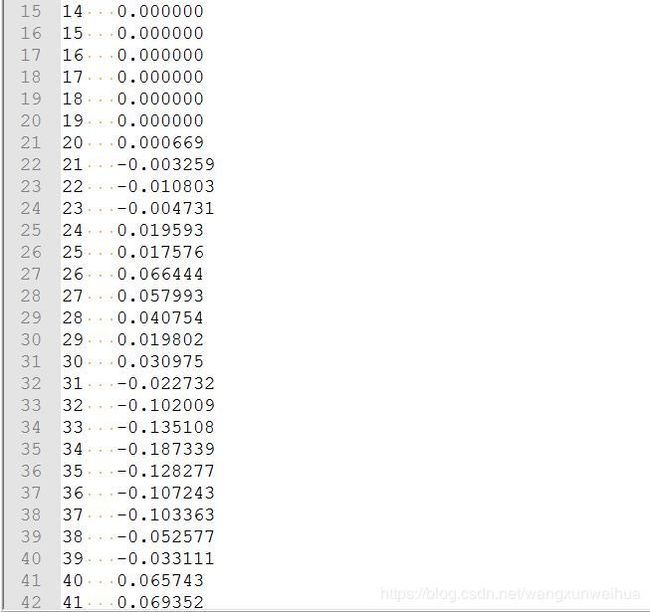
通过逐行对比,我们发现这两种方法的结果是完全一样的,这证明我们的 C 语言程序是正确的。
数字信号处理C语言程序集,殷福亮,宋爱军,辽宁科技出版社,1997. ↩︎
语音信号处理实验教程,梁瑞宇,赵力,魏昕,机械工业出版社,2016. ↩︎