语音增强三,几种固定波束形成技术
Delay and Sum
Fixed Beamforming中最简单的一类——delay and sum,就是信号延迟之后再相加,感兴趣的部分因为信号是相关的,所以越加越大,而不敢兴趣的噪声是不相关的,所以加了和没加一样。这样解释比较通俗一点。稍微不通俗的,Delay and Sum是求解这么一个问题——在约束条件下最大化白噪声增益WNG:
![]()
不难得到,此时的滤波器为:
![]()
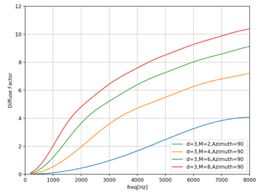
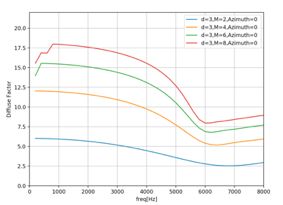
DS最大化WNG的同时(等于10*logM,实际计算WNG和DF的时候要取10*log),Directivity Factor则没有任何的改进(不过后面有专门最大化DF的MaxDF)。比如麦克风个数为8的时候,WNG = 10log8 = 9 ,且是和频率无关的。但是此时的DF仍是和频率、麦克风个数、声源入射角度有关的量。同时,当在高频,扩散声场接近与白噪声场时,DF也会接近WNG的值。下图是我python仿真DF在麦克风距离等于3cm,入射角度为90时候,麦克风个数依次为2、4、6、8时候的Delay and Sum的DF。
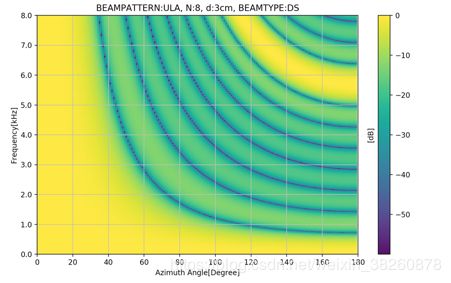
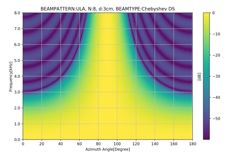
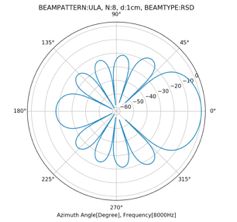
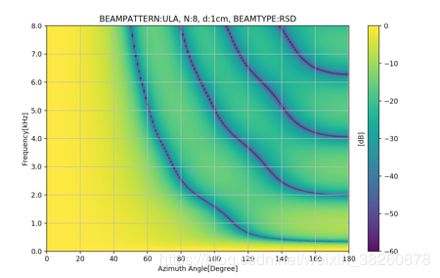
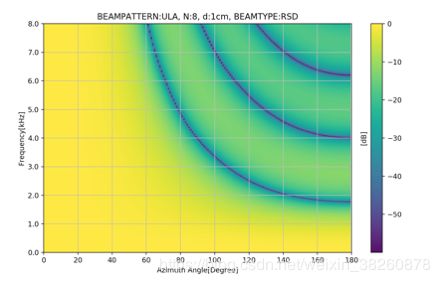
此外,仿真出了Delay and Sum在不同频率下的beampattern的热力图,我们不妨算下,当麦克风间距为3cm时,根据上一章讨论的混叠的条件波长要大于3*2=6cm时才不会发生混叠,也即频率小于5666Hz时不会发生混叠, 下图也明显的可以看到右上方混叠出现的条件,即也是和入射角有关的。
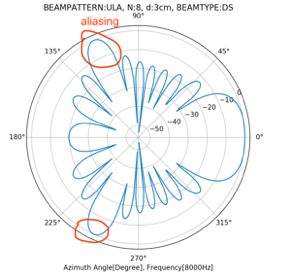
下图则是一个非常明显的混叠的beampattern,阵列响应的旁瓣也同时达到了最大值的。其条件是麦克风个数8,距离3cm,频率8000Hz
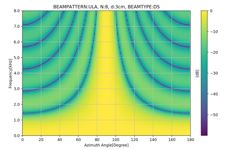
delay and sum的玩法很多,比如可以按照数字信号处理加窗的方法,同样给空间信号加窗,窗的形式也各种各样。比如最典型的一种加Dolph-Chebyshev窗,此方法可以大大降低旁瓣,是一种比较简单的降低旁瓣的技术,但是需要较多数量的麦克风个数。此外。 可以看到下图应用窗之后旁瓣明显降低了许多。
最大指向性因数 Maximum DF
上述的Delay and Sum(DS)是最大化WNG,而此类则是最大化DF,也即
![]()
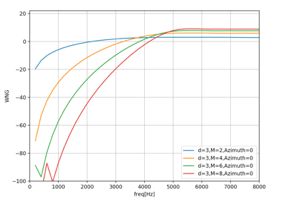
此时对应的阵列的系数即可满足最大化DF,这里就不敲公式了。相比于DS,MDF的DF最大化的同时,肯定损失了WNG,尤其是在低频段,WNG甚至小于0db,反而放大了白噪声。下图就是d=3时,阵列在不同频率及麦克风个数下典型的WNG和DF的表现图。
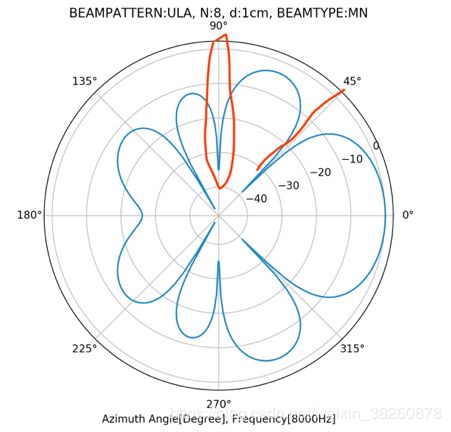
下图则是Maximum在M=8,d=3cm,f=8000,phi=90度时候的beampattern
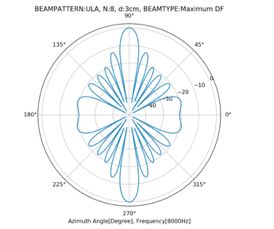
数值计算表明,当maxDF的入射角为0或者180的时候,DF才会达到最大。且麦克风间距小的时候,DF也会越来越大。所以我们管这种beamforming叫做superdirective
RobustSuperdirective
superdirective 的波束形成的DF很漂亮,但是WNG的表现却很糟糕,因此可以给予WNG和DF设置不同的比例因子,进而找到一个能够较好的平衡WNG和DF的beamforming以增加对噪声的鲁棒性,此类的beamforming即为Robust Superdirective。
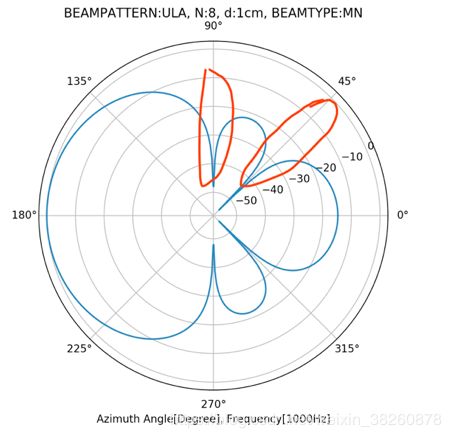
下图分别为平衡因数等于0.01(越大越利于WNG)时候,在f=1000和8000Hz时候beam的表现

下两图分别为平衡因数等于0.1和0.9时候阵列的表现。
Null steering
此类波束形成,顾名思义,没有导向矢量(steering vector),只是利用了空间中不同声源的角度,定制化的波束形成。比如有四个声源,角度分别不同,依据此方法,可以只保留第一个声源角度方位信息的信号,而压制其他方位的信号。
同样的此方法涉及到WNG和DF平衡的问题,因此也引入了平衡因数,用以控制这个跷跷板。以下两图分别是45度和90度有干扰声源的null steering(设计0度保持,45、90度压制),可以看到45,90度的信号已经被完全压制,0度时候信号保持的还算可以,但是相应的其他方向比如,90-180度阵列的增益会达到最大。所以应用此方法的前提是只有这几个方向有信号,其他方向都没有。
subspace法
最后一种则是subspace法,子空间法。
我花了很多的时间研究此方法,但最终还是没能得到正确的结果,很遗憾。
方法的核心思想是把信号分解到只有噪声+信号和只有噪声的子空间中,通过联合对角化的方法求得特征向量及对应的特征值,特征值按降序排列,对应的特征向量对应不同的子空间。求解时只要按序选择不同的子空间个数就可以得到不同的beamforming。当取全部的特征向量时,对应的是Delay and Sum,当取第一个特征值最大对应但特征向量的时候则是super directive。依次来平衡WNG和DF。
我花了很长的时间研究矩阵的联合对角化,从一开始自己看原文理解,到最后求助原文作者提供给我参考书籍获得联合对角化的求解matlab代码,照葫芦画瓢用python实现了一下,但还是没能得到正确结果。此时花费的时间已经约4-5天,有点太长了,所以就停下来继续准备后续的adaptive了。并于今天做了此文的总结。
不过也不是一点收获也没有,我借此重新学习了特征值、特征向量、矩阵对角化等概念,这些在降噪、盲分离中非常重要,但计算开销较大,还好,还好,因此子空间在实时降噪增强中并不多见。于是乎,就先这样吧,以后说不定哪一天就突然拨开乌云见天日了呢。
下一周adaptive beamforming搞起!
更新,不死心的我今天又琢磨了一天的subspace,这一次终于对了。是numpy函数dot一维向量自动计算内积造成的,真的太坑了。。稍微没注意。。搞了好几天。。。真是大坑,不过搞定了问题终于松了一口气,可以开开心心的进击adaptive filter了