第三章——Lyapunov理论基础
文章目录
- 3.1 非线性系统和平衡点
- 非线性系统
- 自治与非自治系统
- 平衡点
- 常规运动
- 3.2 稳定性的概念
- 稳定性与非稳定性
- 渐进稳定性和指数稳定性
- 局部和全局稳定性
- 3.3 线性化和局部稳定性
- 3.4 Lyapunov直接法
- 正定函数和Lyapunov函数
- 平衡点理论
- 全局稳定性的Lyapunov理论
- 不变集理论
- 局部不变集理论
- 全局不变集理论
- 3.5 基于Lyapunov直接法的系统分析
- LTI系统的Lyapunov分析
- 克拉索夫斯基方法(Krasovskii' method)
- 性能分析
- 3.6 基于Lyapunov直接法的控制设计
现如今,Lpapunov线性化方法已经成为线性控制中的代表性理论判据;并且,Lyapunov直接法已经成为非线性系统分析和设计中最为重要的方法。
3.1 非线性系统和平衡点
非线性系统
非线性系统可以用如下微分方程的形式来表示:
x ˙ = f ( x , t ) \dot{x} = f(x,t) x˙=f(x,t)
其中x和f都是(nx1)的向量,n叫做系统的阶数。
自治与非自治系统
根据系统矩阵A是否是时间t的函数,线性系统可以分为时变和时不变的。
但是在非线性系统中,这个形容词变成了自治和非自治。
如果一个非线性系统,其状态方程中不含有时间变量t,那么这个系统是自治的
也就是具有如下状态方程:
x ˙ = f ( x ) \dot{x} = f(x) x˙=f(x)
注意:对于控制系统,上面的定义都是针对闭环系统而言的。而一个控制系统一般都是包括系统和控制器两个部分。因此,一个系统的非自治特性可能由两个方面导致:系统中的时变或者控制器中的时变。
也就是说,一个时不变系统,如果他的控制器取决于时间,那么他们组成的那个闭环系统就是非自治的。
自治与非自治系统的根本区别在于:自治系统的状态轨迹是不依赖于初始时刻的。而非自治系统不是这样。
平衡点
一旦系统状态到达平衡点,那么该系统将一直保持在平衡点。
数学上来说,常向量X*满足:
f ( x ∗ ) = 0 f(x^*) = 0 f(x∗)=0
常规运动
实际系统中,可能更加关心系统运动的稳定性,而不是仅仅在平衡点附近的稳定性。也就是系统在扰动之后能否回复到原来的运动轨迹。为了简化分析,这种问题也可以转化成平衡点附近的稳定性问题。
比如一个系统在初始条件x(0)=x0下的运动轨迹是x*(t),当给初始条件增加了一个扰动,初始条件变成了x(0)=x0+nx0,那么此时的运动轨迹为x(t);
所以误差e(t):
e ( t ) = x ( t ) − x ∗ ( t ) e(t) = x(t)-x^*(t) e(t)=x(t)−x∗(t)
此时,e(t)就满足了如下的非自治微分方程:
e ˙ = f ( x ∗ + e , t ) − f ( x ∗ , t ) = g ( e , t ) \dot{e} = f(x^*+e,t)-f(x^*,t) = g(e,t) e˙=f(x∗+e,t)−f(x∗,t)=g(e,t)
可以通过分析这个扰动方程的稳定性(并且该系统的平衡点位于原点),来等价的判断原系统的稳定性。
3.2 稳定性的概念
一些简化的记号:
- 球形区域内部
B R ⇒ ∥ x ∥ < R B_{R} \quad \Rightarrow \quad \| x \| < R BR⇒∥x∥<R - 球面区域
S R ⇒ ∥ x ∥ = R S_{R} \quad \Rightarrow \quad \| x \| = R SR⇒∥x∥=R
稳定性与非稳定性
平衡状态x=0就是稳定的,用数学语言描述:
∀ R > 0 , ∃ r > 0 , ∥ x ( 0 ) ∥ < r ⇒ ∀ t ≥ 0 , ∥ x ( t ) ∥ < R . \forall R > 0, \exists r > 0, \|x(0)\| < r \quad \Rightarrow \quad \forall t \ge 0, \ \|x(t)\| < R. ∀R>0,∃r>0,∥x(0)∥<r⇒∀t≥0, ∥x(t)∥<R.
稳定性其实也可以说,当系统从某一点开始,系统轨迹可以保持与起始点任意小的距离来运动。相反的,不稳定就不是这样。对于一个不稳定系统,也就说存在一个既定的状态轨迹范围R,不论r多么小,系统从r中起始后,其状态轨迹总会超出这个既定的R。
渐进稳定性和指数稳定性
如果一个平衡点是渐进稳定的,那么首先它得是稳定的,并 随着时间的增大,状态轨迹趋向于0。也就是满足以下数学条件:
∃ r > 0 , ∥ x ( 0 ) ∥ < r ⇒ x ( t ) → 0 , t → ∞ \exists r > 0,\ \|x(0)\| < r \quad \Rightarrow \quad x(t) \rightarrow 0,\ t \rightarrow \infty ∃r>0, ∥x(0)∥<r⇒x(t)→0, t→∞
如果一个平衡点是Lyapunov稳定,但不是渐进稳定,那么这个平衡点属于边缘稳定。
并且需要注意,状态轨迹收敛并不一定意味着系统是稳定的。如果系统在收敛到平衡点之前先到达了一个区域C,但是区域C在系统的正常操作范围之外,那么这平衡点也说是在Lyapunov意义下不稳定。
但是有时候光知道系统能够收敛到平衡点是不够的,还需要知道系统收敛的速度。
如果一个平衡点0是指数稳定的,那么在以原点为圆心的球域Br内,存在两个严格正实数alpha和lambda满足如下条件:
∀ t > 0 , ∥ x ( t ) ∥ ≤ α ∥ x ( 0 ) ∥ e − λ t \forall t>0,\ \|x(t)\| \le \alpha \|x(0)\|e^{-\lambda t} ∀t>0, ∥x(t)∥≤α∥x(0)∥e−λt
也就是说,指数稳定的系统,其状态向量收敛到原点的速度比普通稳定系统要快。正数lambda叫做指数收敛的速度。指数稳定意味着渐进稳定。
局部和全局稳定性
前面说的都是系统从平衡点附近开始,系统状态的演变过程,都是局部过程。
如果渐进稳定包含从任意初始状态开始,那么渐进稳定又叫做大范围渐进稳定。也叫全局渐进稳定。
3.3 线性化和局部稳定性
Lyapunov线性化方法主要与非线性系统的局部稳定性有关。并且他在实际应用中作为使用线性控制技术的判据的基础。
主要分析方法就是利用原始系统在平衡点0处的线性化(也叫线性逼近)。
考虑如下 自治系统,并假设f(x)是连续可微的:
x ˙ = f ( x ) \dot{x}=f(x) x˙=f(x)
对f(x)进行泰勒展开,并忽略2阶及2阶以上的项,得到如下方程:
x ˙ = ( ∂ f ∂ x ) x = 0 x = A x \dot{x} = (\frac{\partial f}{\partial x})_{x=0} \ x \ = \ Ax x˙=(∂x∂f)x=0 x = Ax
这种线性化方法基本上都是利用泰勒展开并忽略高阶项来进行逼近。
Lyapunov线性化方法定理:
如果线性化后的系统是严格稳定的(也就是A的特征值全部位于复平面的左侧),那么原非线性系统在平衡点处是渐进稳定的。
如果线性化后的系统是不稳定的(也就是A的特征值至少有一个位于复平面的右侧),那么原非线性系统在平衡点处是不稳定的。
如果线性化后的系统是边缘稳定的(也就是A的特征值至少有一个位于虚轴上),那么原非线性系统在平衡点处的稳定性无法判断。
3.4 Lyapunov直接法
如果一个机械系统的总能量是持续减小的,那么无论这个系统是线性的还是非线性,最终必定稳定到平衡点处。
- 能量为0意味着到达平衡点。
- 渐进稳定说明系统能量收敛到零。
- 不稳定与系统能量的增长有关。
应用直接法的关键就是找出一个动态系统的标量的类能量函数,并检查这个函数的时间变量,是关于时间的减函数还是增函数 。
正定函数和Lyapunov函数
如果函数 V(x)是局部正定的,那么满足以下条件:
v ( 0 ) = 0 ; x ∈ B R 0 , x ≠ 0 ⇒ v ( x ) > 0 v(0) = 0; \ x \in B_{R_{0}}, \ x \neq 0 \quad \Rightarrow \quad v(x) > 0 v(0)=0; x∈BR0, x=0⇒v(x)>0
如果上面的数学条件在整个状态空间中都成立,那么V(x)就是全局正定。
对于有两个状态变量x1,x2的正定函数V(x1,x2),在三维坐标系下,V一般呈现一个向上的杯子状。想象将“杯子”横切,会得到一些列的轮廓线,也就是V的等值线。
- 正半定说明在正定的基础上,V(x)在x不等于0的区域有等于0的值。
- 负定和负半定与上述定于正好相反。
在一个球域R0中,如果函数V(x)是正定的并且有连续的偏导数,并且它沿系统的任意状态轨迹的时间导数是负半定的,那么这个V(x)就叫做这个系统的Lyapunov函数。
平衡点理论
在球域R0中,如果存在一个标量函数V(x),具有连续的一阶偏导数,并且满足:
- V(x)在R0内正定
- V(x)导数在R0内负半定
那么其平衡点0就是边缘稳定。
另外,如果V(X)导数在R0内是负定的话,该平衡点就成为渐进稳定。
全局稳定性的Lyapunov理论
假设存在一个关于x的标量函数V(x),并且具有连续的一阶导数,并满足:
- V(x)正定
- V(x)导数负定
- 当x范数趋于无穷时,V(x)也趋于无穷。
那么该原点处的平衡点就是全局渐进稳定。
上面第三个条件用数学表达就是:
V ( x ) → ∞ a s ∥ x ∥ → ∞ V(x) \rightarrow \infty \quad as \quad \|x\| \rightarrow \infty V(x)→∞as∥x∥→∞
注意
- 同一个系统可能存在许多个Lyapunov函数。
- 对于 一个给定的系统,某一个特定的Lyapunov函数可能比其他的函数计算出更为精确的结果(也就是说,有时你选取的Lyapunov函数计算出系统是局部稳定的,但是可能存在一些其他的Lyapunov函数,能够计算出系统的渐进稳定性。这就比之前的结果更为精确了)。
不变集理论
对于一个动态系统,如果从集合G内的一点出发的任何一个系统轨迹永远保持在集合G内,那么集合G就叫做不变集。
任何一个平衡点都是一个不变集;
平衡点的吸引域也是一个不变集;
对于一个自治系统来说。状态空间中的任何轨迹都是一个不变集;
因为极限环也是一类特殊的系统轨迹,所以它也是不变集。
吸引域:对于一个渐进稳定性的原点处的平衡点,如果状态轨迹从平衡点0为圆心的球域Br开始,并最终收敛到0点,那么能够取得的最大的这个球域Br,就叫做这个平衡点的吸引域。
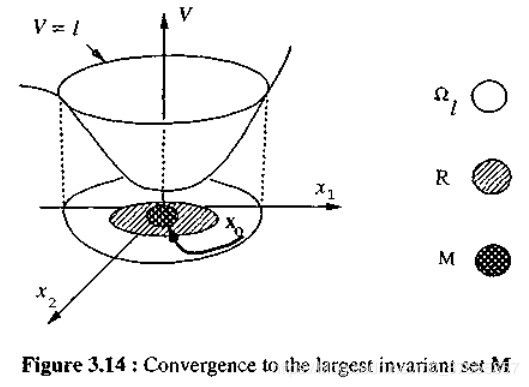
局部不变集理论
考虑一个自治系统 x’ =f(x),其中f连续,V(x)是具有连续一阶偏导数的标量函数,并有以下假设:
- 对于l>0,由V(x)
- 对于 Ω \Omega Ω中的所有x,有V(x)导数小于等于0;
记R为 Ω \Omega Ω区域中的所有V(x)导数等于0的 集合,M为R中的最大的不变集。那么,对于源自 Ω \Omega Ω中的所有解x(t),当时间t趋于无穷的时候,x(t)趋于M。
如果一个系统满足上述条件,那么该系统的Lyapunov函数是不断减小到0的,也就是说该系统是局部渐进稳定的。
分析:
- M是R中所有不变集的一个集合,也就是指平衡点和极限环。
- 如何集合R本身就是一个不变集(V导数一旦等于0,将恒等于0),那么 M=R。
- 函数V没有必要必须正定。
不变集理论的集合解释如下图所示:
不变集理论的一个重要应用:
当系统的Lyapunov函数的导数是负半定的时候,判断平衡点是否是渐进稳定性。
推论:
考虑一个自治系统 x’ =f(x),其中f连续,V(x)是具有连续一阶偏导数的标量函数,并假设在原点附近的一个领域 Ω \Omega Ω满足以下条件:
- V(x)局部正定;
- V(x)导数负半定;
- 由V(x)导数等于0定义的集合R除正常轨迹x恒等于0外,不包含上述系统的其他轨迹
那么,平衡点0就是渐进稳定的。 考虑一个自治系统 x’ =f(x),其中f连续,V(x)是具有连续一阶偏导数的标量函数,并有以下假设: 前面已经说过,一个系统可能存在多个Lyapunov函数,那么也就具有多个相互联系的不变集。此时,系统轨迹收敛到这多个不变集交点处。这样的话,比单独考虑任何一个Lyapunov函数要精确一些。 对于一些特殊的系统,可以利用经验、直觉和物理角度来寻找合适的Lyapunov函数。 对称矩阵: M = M T M=M^{T} M=MT 如果一个n x n的矩阵M满足下面的公式,那么该矩阵是正定的: 塞尔韦斯特定理 半正定:一个nxn的矩阵M是半正定的如果它满足下面是式子: 对于一个LTI系统,其严格稳定的充分必要条件是:对于任意对称正定矩阵Q,Lyapunov方程都有一个唯一解矩阵P是对称正定的。 因此,研究给定线性系统的一个有效的方法是从一个给定的正定矩阵Q中,推出正定矩阵P。其一般步骤是: 1. 克拉索夫斯基定理 由于在很多实际的系统中,系统的雅克比矩阵不满足负定的条件,因此,上面的定理很受限制。考虑该定理的一般化方法。 2. 一般化的克拉索夫斯基定理 Lyapunov函数不仅仅能够用于稳定性的分析,有时也可以利用该函数对稳定系统的转变性能做一个估计。比如,它可以允许我们对渐进稳定的线性或者非线性系统的收敛速度做一个估计。 一般由两种方式来进行控制器的设计: 先假设一种控制规律,然后寻找一个Lyapunov函数来判断这个控制规律的选择是否合适。 恰恰与上面相反,需要先假设一个Lyapunov方程,然后寻找一个控制规律使得这个假设的Lyapunov方程成为一个正确的Lyapunov方程。
另外,在 Ω \Omega Ω内的最大连接域 Ω \Omega Ω(由V(x)全局不变集理论
V ( x ) → ∞ a s ∥ x ∥ → ∞ V(x) \rightarrow \infty \ as \ \|x\| \rightarrow \infty V(x)→∞ as ∥x∥→∞
V ˙ ( x ) ≤ 0 , o v e r t h e w h o l e s t a t e s p a c e . \dot{V}(x) \leq 0, \ over \ the \ whole \ state \ space. V˙(x)≤0, over the whole state space.
记R为V(x)导数等于0下的所有点的集合,并且M是R中最大的一个不变集。那么当时间t趋于无穷的时候,系统所有的解都全局渐进收敛到集合M。3.5 基于Lyapunov直接法的系统分析
LTI系统的Lyapunov分析
反对称矩阵: M = − M T M=-M^{T} M=−MT
并且一个对称矩阵M可以写成一个对称矩阵和一个反对称矩阵的和:
M = M + M T 2 + M − M T 2 M = \frac{M+M^{T}}{2}+\frac{M-M^{T}}{2} M=2M+MT+2M−MT
与反对称矩阵有关的二次方程,其值经常为0;也就是:
∀ x , x T M x = 0 \forall x, \ x^{T}Mx = 0 ∀x, xTMx=0
并且上式也是矩阵M成为反对称矩阵的充分必要条件。
在分析线性系统的时候,经常使用上式这种形式的二次型函数作为候选的Lyapunov函数。
x ≠ 0 ⇒ x T M x > 0 x \neq 0 \quad \Rightarrow \quad x^{T}Mx > 0 x=0⇒xTMx>0
也就是说,如果二次型函数是正定的,那么矩阵M也是正定的。
假设M是对称矩阵,那么M成为正定矩阵的一个充分必要条件是它的各阶主子式均大于0,或者说它的特征值全是正数。
M = U T Λ U M = U^{T}\Lambda U M=UTΛU
其中,U是特征向量组成的矩阵, Λ \Lambda Λ是由特征值组成的对角矩阵。
∀ x , x T M x ≥ 0 \forall x, \ x^{T}Mx \ge 0 ∀x, xTMx≥0
类似的,如果把上面针对正定矩阵的叙述中的严格正数全部替换成正数或着零,那么上面的叙述同样适用于半正定矩阵。
P A + A T P = − Q PA+A^{T}P=-Q PA+ATP=−Q克拉索夫斯基方法(Krasovskii’ method)
考虑一个自治系统,平衡点位于原点处,记A(x)是系统的雅克比矩阵,也就是下式:
A ( x ) = ∂ f ∂ x A(x) = \frac{\partial f}{\partial x} A(x)=∂x∂f
如果矩阵 F = A + A T F=A+A^{T} F=A+AT,F在 Ω \Omega Ω领域内负定的,那么原点处的平衡点就是渐进稳定的,并且此时的一个Lyapunov函数可以表示为:
V ( x ) = f T ( x ) f ( x ) V(x) = f^{T}(x)f(x) V(x)=fT(x)f(x)
并且如果 Ω \Omega Ω是整个状态空间的话,当x范数趋于无穷的时候,V(x)也趋于无穷,那么该平衡点又是全局渐进稳定的。
考虑一个自治系统,平衡点位于原点处,记A(x)是系统的雅克比矩阵。那么原点渐进稳定的充分条件是:存在两个对称的正定矩阵P和Q
∀ x ≠ 0 , F ( x ) = A T P + P A + Q \forall x \neq 0, \ F(x) = A^{T}P+PA+Q ∀x=0, F(x)=ATP+PA+Q
使得F(x)在 Ω \Omega Ω的领域附近是半负定的。
此时系统的一个Lyapunov函数如下:
V ( x ) = f T P f V(x) = f^{T}Pf V(x)=fTPf性能分析
一个简单的收敛引理
如果一个实函数W(t)满足下面的不等式
W ˙ ( t ) + α W ( t ) ≤ 0 , α ∈ R \dot{W}(t)+\alpha W(t) \leq 0, \quad \alpha \in \mathbb{R} W˙(t)+αW(t)≤0,α∈R
那么就有下式成立:
W ( t ) ≤ W ( 0 ) e − α t W(t) \leq W(0)e^{-\alpha t} W(t)≤W(0)e−αt
上面的引理也就意味着,如果W是非负函数,那么满足上面不等式的函数W就会指数收敛到0.
那么在利用Lyapunov直接法分析系统稳定性的时候,可以把函数V改成W的形式,此时,V的指数收敛性和收敛速度就能够确定下来了。3.6 基于Lyapunov直接法的控制设计