
HLS简介
HLS(High Level Synthesis)即高层次综合,不同于以往的FPGA逻辑开发,是用HDL编写的,开发周期长、难度大。而HLS可以使用C,C++,SystemC以及OPenCL等编写,通过高层次综合,可以把软件代码转化为硬件描述语言,可以大大加快开发速度,使软件工程师也可以编写硬件语言。
HLS OpenCV简介
OpenCV是开源的图像处理和计算机视觉库,它支持多种操作系统、包含多种计算机语言的接口。HLS opencv是HLS里带有的可综合成HDL的OpenCV库函数,换句话说,由于HDL和C++的特性(例如动态内存分配不可以综合成HDL)并不是所有的OpenCV库函数都可以综合成HDL,当然目前Xilinx提供了较多的HLS OpenCV库函数,可以满足一定的需求,相信以后会越来越多的。
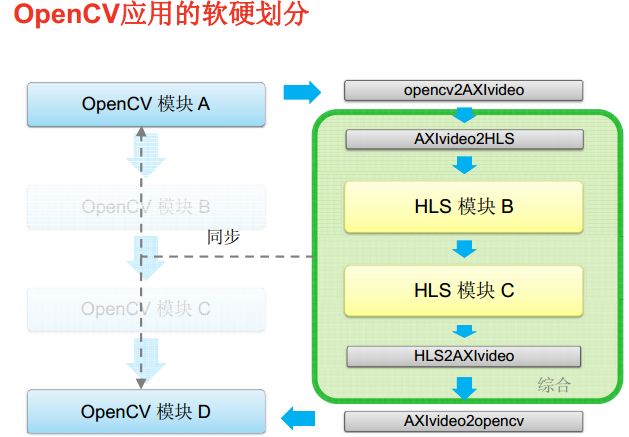
HLS加速模型
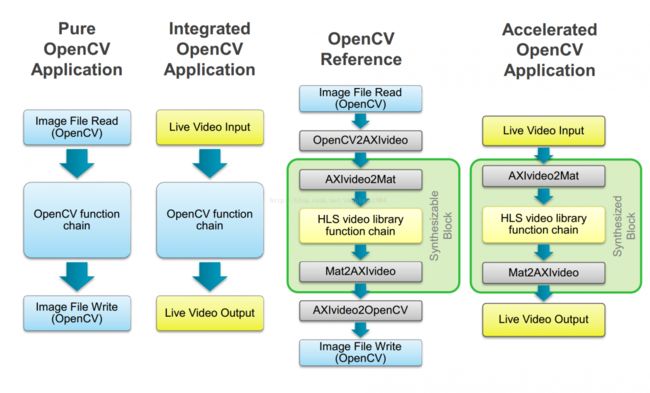
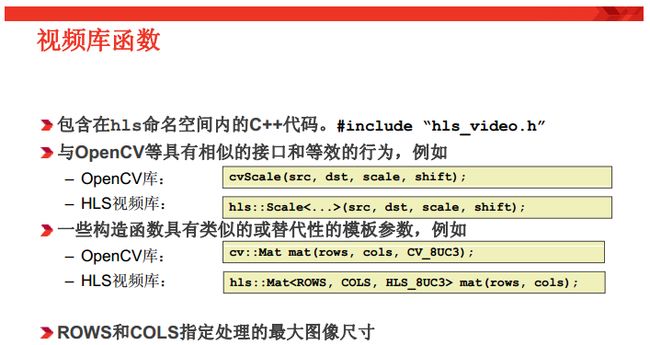
HLS OpenCV和OpenCV有着相似的书写风格
OpenCV library : cvScale(src, dst, scale, shift);
HLS video library : hls::Scale<…>(src, dst, scale, shift);
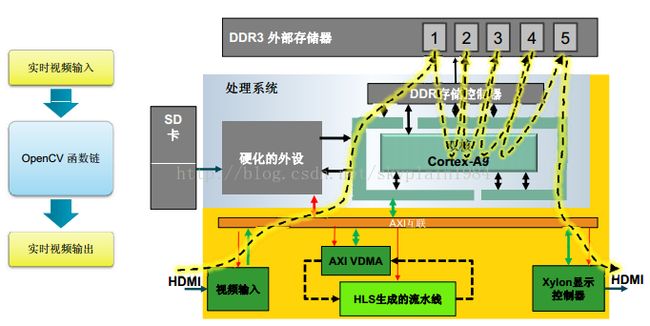
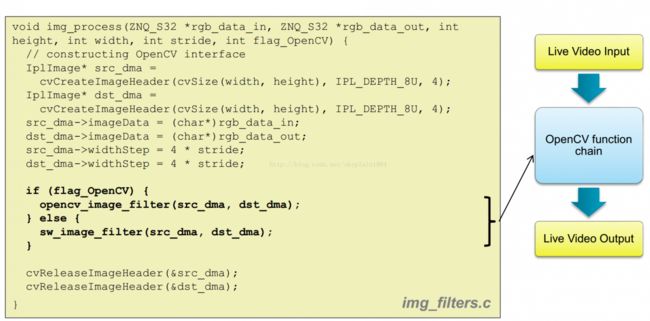

加速的opencv应用

开发注意

实例
#ifndef _IMAGE_CORE_H_
#define _IMAGE_CORE_H_
#include"hls_video.h" //这里调用可以综合的视频库
// maximum image size
#define MAX_WIDTH 1920
#define MAX_HEIGHT 1080
// I/O Image Settings
#define INPUT_IMAGE "test_1080p.jpg"
#define OUTPUT_IMAGE "result_1080p.jpg"
#define OUTPUT_IMAGE_GOLDEN "result_1080p_golden.jpg"
// typedef video library core structures
typedef hls::stream
typedef hls::stream
typedef hls::Mat
// top level function for HW synthesis
void image_core(AXI_STREAM_IN& src_axi, AXI_STREAM_OUT& dst_axi, int rows, int cols);
#endif
#include "image_core.h"
void image_core(AXI_STREAM_IN& input, AXI_STREAM_OUT& output, int rows, int cols) {
#pragma HLS RESOURCE variable=input core=AXI4Stream metadata="-bus_bundle INPUT_STREAM"
#pragma HLS RESOURCE variable=output core=AXI4Stream metadata="-bus_bundle OUTPUT_STREAM"
#pragma HLS INTERFACE ap_none port=cols
#pragma HLS INTERFACE ap_none port=rows
//AP_CONTROL_BUS_AXI(CONTROL_BUS);
//set_directive_interface -mode ap_ctrl_none hls_sobel
#pragma HLS interface ap_ctrl_none port=return
RGB_IMAGE img_0(rows, cols);
RGB_IMAGE img_1(rows, cols);
#pragma HLS DATAFLOW // must use data flow to stream the data
hls::AXIvideo2Mat(input, img_0); //read video stream by frames
hls::Sobel<1,0,3>(img_0, img_1);//use Hls Sobel
hls::Mat2AXIvideo(img_1, output); //write the frames to video stream
}
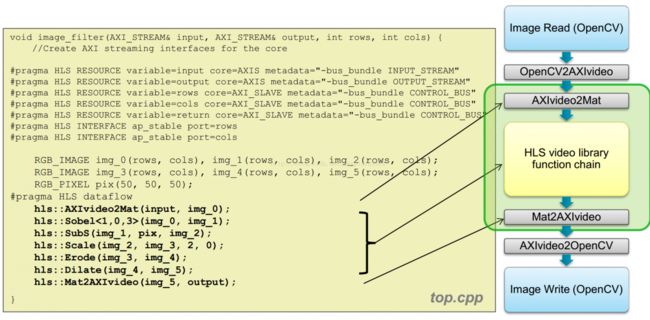
将“input”指定为以 “ S INPUT_STREAM” 命名的AXI4 Stream
#pragma HLS RESOURCE variable=input core=AXIS metadata="-bus_bundle INPUT_STREAM"
将控制接口分配到AXI4 Lite接口
#pragma HLS RESOURCE variable=return core=AXI_SLAVE metadata="-bus_bundle CONTROL_BUS"
指定“rows”可通过AXI4-Lite接口进行访问
#pragma HLS RESOURCE variable=rows core=AXI_SLAVE metadata="-bus_bundle CONTROL_BUS"
声明在函数执行过程中 “rows”不会改变
#pragma HLS INTERFACE ap_stable port=rows
启用数据流优化
#pragma HLS dataflow
C综合
点击Solution -> Run C Synthesis -> Active Solution
运行test.cpp C仿真测试
#include "image_core.h"
#include "opencv/cv.h"
#include "opencv/cxcore.h"
#include "opencv/highgui.h"
#include "hls_opencv.h"
int main (int argc, char** argv) {
IplImage* src = cvLoadImage(INPUT_IMAGE);
IplImage* dst = cvCreateImage(cvGetSize(src), src->depth, src->nChannels);
AXI_STREAM_IN src_axi;
AXI_STREAM_OUT dst_axi;
IplImage2AXIvideo(src, src_axi); //将图像转为视频流结构
image_core(src_axi, dst_axi, src->height, src->width);
AXIvideo2IplImage(dst_axi, dst);
cvSaveImage(OUTPUT_IMAGE, dst);
cvReleaseImage(&src);
cvReleaseImage(&dst);
}
点击Project -> Run C simulation,弹出的对话框点确定即可。


文章来源:skyplain1984的博客
- 嵌入式开发
- HLS
- Zynq
- FPGA菜鸟's blog
- 要发表评论,请先登录 或 注册
- 1360 次点击