【点云】Large-scale Point Cloud Semantic Segmentation with Superpoint Graphs
目录
1 摘要
2 介绍
3 方法
3.1 基于全局能量的集合分割
3.2 建立超点图
3.3 嵌入超点
3.4上下文分割
1 摘要
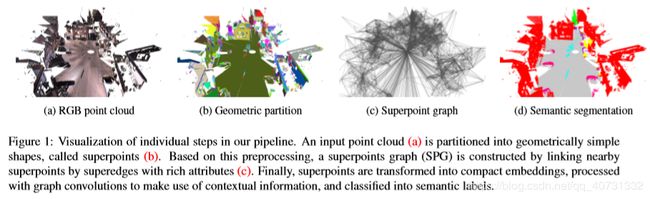
我们提出一个基于深度学习的框架,来解决大规模点云的语义分割问题。我们认为点云的组织形式可以被SPG(Superpoint Graph)有效的捕获,SPG是从被分割为几何均匀部分的扫描场景中得到。SPGs提供了一个紧凑但是充足的目标上下文关系的表示,并可以被应用到图卷积网络。
2 介绍
大规模点云的语义分割有大量挑战,这些困难阻碍了卷积神经网络的应用:(1)大规模数据;(2)没有明确的组织结构(图片的规则网格)。前人希望将CNN结构在图片分割中的成功应用复制到点云数据上,比如:(1)SnapNet: 将点云转换为一系列二维RGBD快照,对快照的语义切割可以应用到原数据上。(2)SegCloud: 在规则体素网格中使用三维卷积。
然而,我们认为这些方法没有捕捉到点云数据的固有结构,因此限制了描述的表现。将点云转换为二维格式会带来信息的损失,并且要求做表面再卷积,这和语义分割一样难。点云的体积表示是低效的,并会丢失细节。还有很多特别为点云设计的深度学习模型,表现不错,但是受限于输入数据的尺寸。
我们提出了一种大规模点云的表示方式,简单形状(超级点)内在联系的集合,是用于图像语义分割的超级像素的迁移。这种结构可以被属性有向图(SPG)捕获,它的结点代表简单形状,边描述了结点被丰富的边特征描述的邻近关系。
SPG有很多优点:
(1)取代了去对单个点或体素的分类,SPG关注整个目标部分,这更容易被分类
(2)SPG可以细节地描述邻近物品的关系,这对上下文分类很重要:车总是在路上,天花板总是被墙所环绕。
(3)SPG的大小被简单结构的数量所决定而不是点云中点的数量,这少了好几个量级。
这使得我们可以将大规模内在关系模型化。我们的贡献如下:
(1)我们介绍了SPG,一种全新的点云表示方式,带有丰富的边特征,表征了点云部分间的上下文关系。
(2)基于这种表达,我们可以在大规模点云上应用深度学习,而不需要牺牲细节,我们的结构包括PointNets,用于超级点的嵌入和图卷积,以及上下文分割。并且我们介绍了一种全新的、更高效的以边为条件的卷积(ECC),和一种新得输入门格式GRU
3 方法
我们主要想解决点云的大小问题。点云往往包含上亿个点,使得很难直接使用深度学习方法。我们提出的SPG表示使得我们将语义分割问题划分为三个不同的问题。
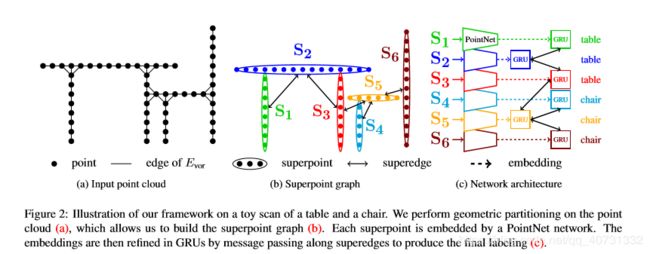
(1)几何同质分割:将点云分割为简单但富有意义的几何形状。这个无监督步骤,将所有点云作为输入,因此必须被高效地计算。通过这个分割,SPG可以被简单地计算。
(2)Superpoint嵌入:SPG的每个点都关联于点云的一个小的部分,我们假设这部分是语义同质的。通过降采样,最多数百个点可以代表这些初始部分。减小输入点云的规模,使得我们可以使用PointNet。
(3)上下文分割:SPG比任何其他在初始点云上建立的图更小。基于图卷积的深度学习方法可以用大量的边特征(促进了特征大范围的互动)对点分类。
3.1 基于全局能量的集合分割
我们的目标不是分离出像车、椅子这样的实际个体,而是这些更简单、共有的抽象部分。我认为这一步类似于图像中设计卷积核提取特征,只不过这里使用的是无监督方法。注意,这一步是完全无监督的,并且没有使用分类的标签。
输入点云C,有n个点,每个点![]() ,被它的三维位置
,被它的三维位置![]() ,或者,其他观察值
,或者,其他观察值![]() ,比如颜色、强度所定义。对每个点,我们计算
,比如颜色、强度所定义。对每个点,我们计算![]() 个集合特征
个集合特征![]() ,描述了局部邻近的形状。我们使用:线性,平面性和散射(linearity, planarity, scattering)。我们也计算了每个点的高度,定义为pi在整个输入点云归一化坐标中的
,描述了局部邻近的形状。我们使用:线性,平面性和散射(linearity, planarity, scattering)。我们也计算了每个点的高度,定义为pi在整个输入点云归一化坐标中的![]() 。
。
Global energy由10最近邻邻接图Gnn = (C, Enn)。几何同质分割定义为以下优化问题解的常数连通分量。

其中[·]是Iverson bracket(艾佛森括号,如果括号内的条件满足则为1,不满足则为0),边w的权值随边的长度线性递减。因子μ是正则化强度,它决定了结果划分的粗糙程度。
要使全局最小,(1)gi应该尽可能等于fi;(2)gi应该尽可能等于gj。具体来说,(1)希望gi尽可能的“代表”fi;(2)希望gi, gj尽可能相同。带来的结果就是,使得尽可能多的特征相似的点的g值相同。最后,g值相同的点被视作一个Superpoint。全部的点被划分为:![]() 。
。
3.2 建立超点图
![]() ,其中S是超点,
,其中S是超点,![]() 是超边代表超点间的邻接关系。超边由df个特征,描述了超点间的邻接关系。F是特征矩阵。
是超边代表超点间的邻接关系。超边由df个特征,描述了超点间的邻接关系。F是特征矩阵。
对称Vorinoi邻接图![]() 。如果在Evor中至少存在一条边,连接两个超点S和T,则S和T有邻接关系。
。如果在Evor中至少存在一条边,连接两个超点S和T,则S和T有邻接关系。
![]()
超边特征描述:
![]()
各超点间点的位置的协方差矩阵的特征按降序排序:![]()
Length(S) = λ1
Surface(S) = λ1λ2
Volume(S) = λ1λ2λ3

3.3 嵌入超点
为了保证批处理的效率和数据扩充的方便,我们将实时采样的超级点降至np = 128点。因为PointNet的max-pooling操作,降采样并不会影响效果。但我们也观察到当超点的点数少于nminp = 40时,效果变差。
为了让PointNet学习不同形状的空间分布,在嵌入前,每个超点被重新标为单位球。点被正则化距离![]() ,观察值,oi和几何特征
,观察值,oi和几何特征![]() 表示。为了为了保持形状大小的协变,超点的原始公制直径,在PointNet的max-pooling之后被连接使用,作为额外的特征。最后每个超点Si嵌入PointNet得到一个dz维的向量zi。
表示。为了为了保持形状大小的协变,超点的原始公制直径,在PointNet的max-pooling之后被连接使用,作为额外的特征。最后每个超点Si嵌入PointNet得到一个dz维的向量zi。
3.4上下文分割
我们的方法基于Gated Graph Neural Networks和Edge-Conditioned Convolutions。总的来说,超点根据超边的信息片段来改进它们的嵌入。
参考:https://blog.csdn.net/Dujing2019/article/details/104091750