【 FPGA 】超声波测距小实验(四):数码管显示测距结果
上篇博文:测了回响脉冲的宽度为多少个10us,这篇博文要算出距离,且用数码管显示距离的十进制结果。
功能框图如下:
 、
、
距离计算:
还是先给出程序之后在简单解释吧。
顶层模块:
/////////////////////////////////////////////////////////////////////////////
//工程硬件平台: Xilinx Spartan 6 FPGA
/////////////////////////////////////////////////////////////////////////////
//每100ms产生1个超声波测距模块所需的10us高脉冲激励,并用数码管以10进制数据显示最终经过换算后的距离信息(单位mm)
module sp6(
input ext_clk_25m, //外部输入25MHz时钟信号
input ext_rst_n, //外部输入复位信号,低电平有效
output ultrasound_trig, //超声波测距模块脉冲激励信号,10us的高脉冲
input ultrasound_echo, //超声波测距模块回响信号
output[3:0] dtube_cs_n, //7段数码管位选信号
output[7:0] dtube_data //7段数码管段选信号(包括小数点为8段)
);
//-------------------------------------
//PLL例化
wire clk_12m5; //PLL输出12.5MHz时钟
wire clk_25m; //PLL输出25MHz时钟
wire clk_50m; //PLL输出50MHz时钟
wire clk_100m; //PLL输出100MHz时钟
wire sys_rst_n; //PLL输出的locked信号,作为FPGA内部的复位信号,低电平复位,高电平正常工作
pll_controller uut_pll_controller
(// Clock in ports
.CLK_IN1(ext_clk_25m), // IN
// Clock out ports
.CLK_OUT1(clk_12m5), // OUT
.CLK_OUT2(clk_25m), // OUT
.CLK_OUT3(clk_50m), // OUT
.CLK_OUT4(clk_100m), // OUT
// Status and control signals
.RESET(~ext_rst_n),// IN
.LOCKED(sys_rst_n)); // OUT
//-------------------------------------
//25MHz时钟进行分频,产生一个100KHz频率的时钟使能信号
wire clk_100khz_en; //100KHz频率的一个时钟使能信号,即每10us产生一个时钟脉冲
clkdiv_generation uut_clkdiv_generation(
.clk(clk_25m), //时钟信号
.rst_n(sys_rst_n), //复位信号,低电平有效
.clk_100khz_en(clk_100khz_en) //100KHz频率的一个时钟使能信号,即每10us产生一个时钟脉冲
);
//-------------------------------------
//每100ms产生一个10us的高脉冲作为超声波测距模块的激励
wire[15:0] echo_pulse_num; //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值
wire echo_pulse_en; //超声波测距模块回响信号计数值有效信号
ultrasound_controller uut_ultrasound_controller(
.clk(clk_25m), //时钟信号
.rst_n(sys_rst_n), //复位信号,低电平有效
.clk_100khz_en(clk_100khz_en), //100KHz频率的一个时钟使能信号,即每10us产生一个时钟脉冲
.ultrasound_trig(ultrasound_trig), //超声波测距模块脉冲激励信号,10us的高脉冲
.ultrasound_echo(ultrasound_echo), //超声波测距模块回响信号
.echo_pulse_en(echo_pulse_en), //超声波测距模块回响信号计数值有效信号
.echo_pulse_num(echo_pulse_num) //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值
);
//-------------------------------------
//缓存最近采集到的8组超声波测距回响脉冲计数值,对它们进行累加并求平均
wire[15:0] echo_pulse_filter_num; //滤波处理后的超声波测距模块回响信号高脉冲计数值
filter uut_filter(
.clk(clk_25m), //时钟信号
.rst_n(sys_rst_n), //复位信号,低电平有效
.echo_pulse_en(echo_pulse_en), //超声波测距模块回响信号计数值有效信号
.echo_pulse_num(echo_pulse_num), //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值
.echo_pulse_filter_num(echo_pulse_filter_num) //滤波处理后的超声波测距模块回响信号高脉冲计数值
);
//-------------------------------------
//换算出超声波测距的实际距离,并且以十进制,单位mm形式输出
wire[15:0] echo_pulse_f_mul_num; //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值,换算为实际距离的10进制数据
distance_compute uut_distance_compute(
.clk(clk_25m), //时钟信号
.rst_n(sys_rst_n), //复位信号,低电平有效
.echo_pulse_filter_num(echo_pulse_filter_num), //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值
.echo_pulse_f_mul_num(echo_pulse_f_mul_num) //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值,换算为实际距离的10进制数据
);
//-------------------------------------
//4位数码管显示驱动
seg7 uut_seg7(
.clk(clk_25m), //时钟信号
.rst_n(sys_rst_n), //复位信号,低电平有效
.display_num(echo_pulse_f_mul_num), //显示数据
.dtube_cs_n(dtube_cs_n), //7段数码管位选信号
.dtube_data(dtube_data) //7段数码管段选信号(包括小数点为8段)
);
endmodule
子模块:
/////////////////////////////////////////////////////////////////////////////
//工程硬件平台: Xilinx Spartan 6 FPGA
//25°C时,声音在空气中传播的速度为346m/s
//因此取距离s的单位是米(m),时间t的单位是秒(s),有 s = 346*t/2
//若取距离s的单位是毫米(mm),时间t的单位是10微秒(10us),有s*0.001 = 346*t*0.00001/2,即s = 1.73*t
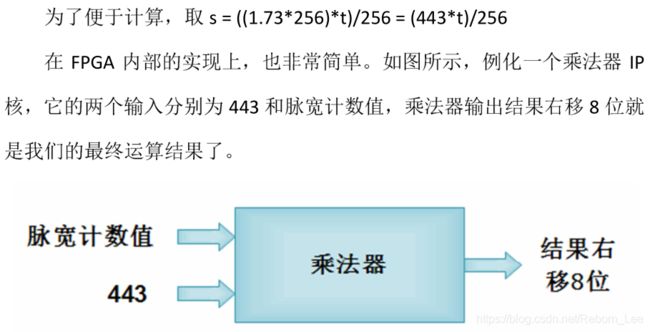
//为了便于计算,取s = ((1.73*256)*t)/256 = (443*t)/256
module distance_compute(
input clk, //外部输入25MHz时钟信号
input rst_n, //外部输入复位信号,低电平有效
input[15:0] echo_pulse_filter_num, //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值
output[15:0] echo_pulse_f_mul_num //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值,换算为实际距离的10进制数据
);
//-------------------------------------------------
//距离换算
wire[31:0] mul_out; //输出的乘法运算结果,取bit23-8为有效的16bit数据
mul uut_mul (
.clk(clk), // input clk
.a(16'd443), // input [15 : 0] a
.b(echo_pulse_filter_num), // input [15 : 0] b
.p(mul_out) // output [31 : 0] p
);
//-------------------------------------------------
//将16进制数据转换为10进制,由于我们已知有效的16bit数据的有效范围是0-4000mm
wire[15:0] thousand_quotint,thousand_fractional; //千位除法运算结果与余数寄存器
//千位运算
div thousand_div (
.clk(clk), // input clk
.rfd(), // output rfd
.dividend(mul_out[23:8]), // input [15 : 0] dividend
.divisor(16'd1000), // input [15 : 0] divisor
.quotient(thousand_quotint), // output [15 : 0] quotient
.fractional(thousand_fractional) // output [15 : 0] fractional
);
wire[15:0] hundred_quotint,hundred_fractional; //百位除法运算结果与余数寄存器
//百位运算
div hundred_div (
.clk(clk), // input clk
.rfd(), // output rfd
.dividend(thousand_fractional), // input [15 : 0] dividend
.divisor(16'd100), // input [15 : 0] divisor
.quotient(hundred_quotint), // output [15 : 0] quotient
.fractional(hundred_fractional) // output [15 : 0] fractional
);
wire[15:0] ten_quotint,ten_fractional; //十位除法运算结果与余数寄存器
//十位运算
div ten_div (
.clk(clk), // input clk
.rfd(), // output rfd
.dividend(hundred_fractional), // input [15 : 0] dividend
.divisor(16'd10), // input [15 : 0] divisor
.quotient(ten_quotint), // output [15 : 0] quotient
.fractional(ten_fractional) // output [15 : 0] fractional
);
assign echo_pulse_f_mul_num = {thousand_quotint[3:0],hundred_quotint[3:0],ten_quotint[3:0],ten_fractional[3:0]};
endmodule
/////////////////////////////////////////////////////////////////////////////
//工程硬件平台: Xilinx Spartan 6 FPGA
/////////////////////////////////////////////////////////////////////////////
module clkdiv_generation(
input clk, //外部输入25MHz时钟信号
input rst_n, //外部输入复位信号,低电平有效
output clk_100khz_en //100KHz频率的一个时钟使能信号,即每10us产生一个时钟脉冲
);
//-------------------------------------------------
//时钟分频产生
reg[7:0] cnt; //时钟分频计数器,0-249
//1s定时计数
always @(posedge clk or negedge rst_n)
if(!rst_n) cnt <= 8'd0;
else if(cnt < 8'd249) cnt <= cnt+1'b1;
else cnt <= 8'd0;
assign clk_100khz_en = (cnt == 8'd249) ? 1'b1:1'b0; //每40us产生一个40ns的高脉冲
endmodule
/////////////////////////////////////////////////////////////////////////////
//工程硬件平台: Xilinx Spartan 6 FPGA
/////////////////////////////////////////////////////////////////////////////
module ultrasound_controller(
input clk, //外部输入25MHz时钟信号
input rst_n, //外部输入复位信号,低电平有效
input clk_100khz_en, //100KHz频率的一个时钟使能信号,即每10us产生一个时钟脉冲
output ultrasound_trig, //超声波测距模块脉冲激励信号,10us的高脉冲
input ultrasound_echo, //超声波测距模块回响信号
output reg echo_pulse_en, //超声波测距模块回响信号计数值有效信号
output reg[15:0] echo_pulse_num //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值
);
//-------------------------------------------------
//1s定时产生逻辑
reg[13:0] timer_cnt; //1s计数器,以100KHz(10us)为单位进行计数,计数100ms需要的计数范围是0~9999
//1s定时计数
always @(posedge clk or negedge rst_n)
if(!rst_n) timer_cnt <= 14'd0;
else if(clk_100khz_en) begin
if(timer_cnt < 14'd9_999) timer_cnt <= timer_cnt+1'b1;
else timer_cnt <= 14'd0;
end
else ;
assign ultrasound_trig = (timer_cnt == 14'd1) ? 1'b1:1'b0; //10us高脉冲生成
//-------------------------------------------------
//超声波测距模块的回响信号echo打两拍,产生上升沿和下降沿标志位
reg[1:0] ultrasound_echo_r;
always @(posedge clk or negedge rst_n)
if(!rst_n) ultrasound_echo_r <= 2'b00;
else ultrasound_echo_r <= {ultrasound_echo_r[0],ultrasound_echo};
wire pos_echo = ~ultrasound_echo_r[1] & ultrasound_echo_r[0]; //echo信号上升沿标志位,高电平有效一个时钟周期
wire neg_echo = ultrasound_echo_r[1] & ~ultrasound_echo_r[0]; //echo信号下降沿标志位,高电平有效一个时钟周期
//-------------------------------------------------
//以10us为单位对超声波测距模块回响信号高脉冲进行计数
reg[15:0] echo_cnt; //回响高脉冲计数器
always @(posedge clk or negedge rst_n)
if(!rst_n) echo_cnt <= 16'd0;
else if(pos_echo) echo_cnt <= 16'd0; //计数清零
else if(clk_100khz_en && ultrasound_echo_r[0]) echo_cnt <= echo_cnt+1'b1;
else ;
//计数脉冲数锁存
always @(posedge clk or negedge rst_n)
if(!rst_n) echo_pulse_num <= 16'd0;
else if(neg_echo) echo_pulse_num <= echo_cnt;
//计数脉冲有效使能信号锁存
always @(posedge clk or negedge rst_n)
if(!rst_n) echo_pulse_en <= 1'b0;
else echo_pulse_en <= neg_echo;
endmodule
/////////////////////////////////////////////////////////////////////////////
//工程硬件平台: Xilinx Spartan 6 FPGA
/////////////////////////////////////////////////////////////////////////////
//缓存最近采集到的8组超声波测距回响脉冲计数值,对它们进行累加并求平均
module filter(
input clk, //外部输入25MHz时钟信号
input rst_n, //外部输入复位信号,低电平有效
input echo_pulse_en, //超声波测距模块回响信号计数值有效信号
input[15:0] echo_pulse_num, //以10us为单位对超声波测距模块回响信号高脉冲进行计数的最终值
output[15:0] echo_pulse_filter_num //滤波处理后的超声波测距模块回响信号高脉冲计数值
);
//-------------------------------------------------
//echo_pulse_num信号缓存10拍
reg[15:0] pulse_reg[7:0]; //echo_pulse_num信号缓存寄存器
always @(posedge clk or negedge rst_n)
if(!rst_n) begin
pulse_reg[0] <= 16'd0;
pulse_reg[1] <= 16'd0;
pulse_reg[2] <= 16'd0;
pulse_reg[3] <= 16'd0;
pulse_reg[4] <= 16'd0;
pulse_reg[5] <= 16'd0;
pulse_reg[6] <= 16'd0;
pulse_reg[7] <= 16'd0;
end
else if(echo_pulse_en) begin //缓存最新的数据,使用移位寄存器的方式推进最新数据,推出最老的数据
pulse_reg[0] <= echo_pulse_num;
pulse_reg[1] <= pulse_reg[0];
pulse_reg[2] <= pulse_reg[1];
pulse_reg[3] <= pulse_reg[2];
pulse_reg[4] <= pulse_reg[3];
pulse_reg[5] <= pulse_reg[4];
pulse_reg[6] <= pulse_reg[5];
pulse_reg[7] <= pulse_reg[6];
end
//-------------------------------------------------
//对8个数据累加并输出平均值
reg[15:0] sum_pulse_reg;
always @(posedge clk or negedge rst_n)
if(!rst_n) sum_pulse_reg <= 16'd0;
else sum_pulse_reg <= pulse_reg[0]+pulse_reg[1]+pulse_reg[2]+pulse_reg[3]+pulse_reg[4]+pulse_reg[5]+pulse_reg[6]+pulse_reg[7];
assign echo_pulse_filter_num = {3'b000,sum_pulse_reg[15:3]}; //右移3位,相当于除以8
endmodule
/////////////////////////////////////////////////////////////////////////////
//工程硬件平台: Xilinx Spartan 6 FPGA
/////////////////////////////////////////////////////////////////////////////
module seg7(
input clk, //时钟信号,25MHz
input rst_n, //复位信号,低电平有效
input[15:0] display_num, //数码管显示数据,[15:12]--数码管千位,[11:8]--数码管百位,[7:4]--数码管十位,[3:0]--数码管个位
output reg[3:0] dtube_cs_n, //7段数码管位选信号
output reg[7:0] dtube_data //7段数码管段选信号(包括小数点为8段)
);
//-------------------------------------------------
//参数定义
//数码管显示 0~F 对应段选输出
parameter NUM0 = 8'h3f,//c0,
NUM1 = 8'h06,//f9,
NUM2 = 8'h5b,//a4,
NUM3 = 8'h4f,//b0,
NUM4 = 8'h66,//99,
NUM5 = 8'h6d,//92,
NUM6 = 8'h7d,//82,
NUM7 = 8'h07,//F8,
NUM8 = 8'h7f,//80,
NUM9 = 8'h6f,//90,
NUMA = 8'h77,//88,
NUMB = 8'h7c,//83,
NUMC = 8'h39,//c6,
NUMD = 8'h5e,//a1,
NUME = 8'h79,//86,
NUMF = 8'h71,//8e;
NDOT = 8'h80; //小数点显示
//数码管位选 0~3 对应输出
parameter CSN = 4'b1111,
CS0 = 4'b1110,
CS1 = 4'b1101,
CS2 = 4'b1011,
CS3 = 4'b0111;
//-------------------------------------------------
//分时显示数据控制单元
reg[3:0] current_display_num; //当前显示数据
reg[7:0] div_cnt; //分时计数器
//分时计数器
always @(posedge clk or negedge rst_n)
if(!rst_n) div_cnt <= 8'd0;
else div_cnt <= div_cnt+1'b1;
//显示数据
always @(posedge clk or negedge rst_n)
if(!rst_n) current_display_num <= 4'h0;
else begin
case(div_cnt)
8'hff: current_display_num <= display_num[3:0];
8'h3f: current_display_num <= display_num[7:4];
8'h7f: current_display_num <= display_num[11:8];
8'hbf: current_display_num <= display_num[15:12];
default: ;
endcase
end
//段选数据译码
always @(posedge clk or negedge rst_n)
if(!rst_n) dtube_data <= NUM0;
else begin
case(current_display_num)
4'h0: dtube_data <= NUM0;
4'h1: dtube_data <= NUM1;
4'h2: dtube_data <= NUM2;
4'h3: dtube_data <= NUM3;
4'h4: dtube_data <= NUM4;
4'h5: dtube_data <= NUM5;
4'h6: dtube_data <= NUM6;
4'h7: dtube_data <= NUM7;
4'h8: dtube_data <= NUM8;
4'h9: dtube_data <= NUM9;
4'ha: dtube_data <= NUMA;
4'hb: dtube_data <= NUMB;
4'hc: dtube_data <= NUMC;
4'hd: dtube_data <= NUMD;
4'he: dtube_data <= NUME;
4'hf: dtube_data <= NUMF;
default: ;
endcase
end
//位选译码
always @(posedge clk or negedge rst_n)
if(!rst_n) dtube_cs_n <= CSN;
else begin
case(div_cnt[7:6])
2'b00: dtube_cs_n <= CS0;
2'b01: dtube_cs_n <= CS1;
2'b10: dtube_cs_n <= CS2;
2'b11: dtube_cs_n <= CS3;
default: dtube_cs_n <= CSN;
endcase
end
endmodule
其他,前几篇博文已经讲了。这里重点讲讲模块distance_compute:
原理:
//25°C时,声音在空气中传播的速度为346m/s
//因此取距离s的单位是米(m),时间t的单位是秒(s),有 s = 346*t/2
//若取距离s的单位是毫米(mm),时间t的单位是10微秒(10us),有s*0.001 = 346*t*0.00001/2,即s = 1.73*t
//为了便于计算,取s = ((1.73*256)*t)/256 = (443*t)/256
关于443与脉宽t相乘,用了一个相乘的IP核,IP核模板为:
mul your_instance_name (
.clk(clk), // input clk
.a(a), // input [15 : 0] a
.b(b), // input [15 : 0] b
.p(p) // output [31 : 0] p
);
//距离换算
wire[31:0] mul_out; //输出的乘法运算结果,取bit23-8为有效的16bit数据
mul uut_mul (
.clk(clk), // input clk
.a(16'd443), // input [15 : 0] a
.b(echo_pulse_filter_num), // input [15 : 0] b
.p(mul_out) // output [31 : 0] p
);
相乘的结果是32位的mul_out;
之后对这个结果进行除以256以及转换为10进制的运算:
除以256相当于被除数右移8位,并且被除数有最大值,可以确定32位中的多少位有数,这里是mul_out[23:8],作为结果。
之后除以1000得到结果作为十进制的千位,余数除以100,得到结果作为百位,余数除以10得到十位,余数作为个位。
程序体现:
wire[15:0] thousand_quotint,thousand_fractional; //千位除法运算结果与余数寄存器
//千位运算
div thousand_div (
.clk(clk), // input clk
.rfd(), // output rfd
.dividend(mul_out[23:8]), // input [15 : 0] dividend
.divisor(16'd1000), // input [15 : 0] divisor
.quotient(thousand_quotint), // output [15 : 0] quotient
.fractional(thousand_fractional) // output [15 : 0] fractional
);
wire[15:0] hundred_quotint,hundred_fractional; //百位除法运算结果与余数寄存器
//百位运算
div hundred_div (
.clk(clk), // input clk
.rfd(), // output rfd
.dividend(thousand_fractional), // input [15 : 0] dividend
.divisor(16'd100), // input [15 : 0] divisor
.quotient(hundred_quotint), // output [15 : 0] quotient
.fractional(hundred_fractional) // output [15 : 0] fractional
);
wire[15:0] ten_quotint,ten_fractional; //十位除法运算结果与余数寄存器
//十位运算
div ten_div (
.clk(clk), // input clk
.rfd(), // output rfd
.dividend(hundred_fractional), // input [15 : 0] dividend
.divisor(16'd10), // input [15 : 0] divisor
.quotient(ten_quotint), // output [15 : 0] quotient
.fractional(ten_fractional) // output [15 : 0] fractional
);
assign echo_pulse_f_mul_num = {thousand_quotint[3:0],hundred_quotint[3:0],ten_quotint[3:0],ten_fractional[3:0]};