进阶无人驾驶—Apollo硬件开发平台介绍
课程简介
课程简介:有关自动驾驶课件及Apollo硬件开放平台的内容,让学习者进一步了解自动驾驶汽车的硬件结构、传感器、线控等硬件系统,为熟悉整体自动驾驶技术模块打下基础。那就让我们开始这次愉快的学习之旅吧。
一、课程开讲啦!
本次课程是Apollo平台得产品经理王石峰为大家带来本次课程的内容。
首先我们需要对产品进行分析,分析一个自动驾驶的事故。便可以通过这个事故来分析自动驾驶整个硬件系统,然后就能通过对硬件产品的性能分析让大家了解更多的知识。
上图便是Uber车辆交通事故的分析:
一、当这个车发生碰撞的前六秒钟,车辆计算机已经发现了行人;事故发生前的一秒钟,汽车刹车制动的AEB功能已经启动,但是车并没有制动,原因是Uber在对沃尔沃的SUV车进行改进时,它将汽车的制动系统进行截断,改为计算机控制的刹车制动模式。所以汽车没有一个闭环的状态。
二、驾驶员并未对道路进行观察,而是低头玩手机,所以当事故即将发生时,他并未能及时处理,产生了交互的缺陷。
三、道路线上的照明不足,导致汽车在对行人进行判断时,不能够准确清楚的判别出,所以导致碰撞行人的情况出现。
四、汽车安装传感器会影响车辆的正常行驶,这就导致很多改装都不符合车规,从而产生事故。
大家都知道,安全是驾驶的第一条,不管是不是自动驾驶都是这样的。
二、研发流程
软件在环是基于仿真和模拟(类似于赛车游戏)、硬件在环是基于必要的硬件生产(硬件环境中测试)、车辆在环(封闭场地测试)、司机在环(基于人、车、道路、交通进行测试)。
自动驾驶不仅仅是一个汽车智能系统的问题,更是一个人机交互的问题。所以从整个研究来看,基于人的设计是必不可少的。
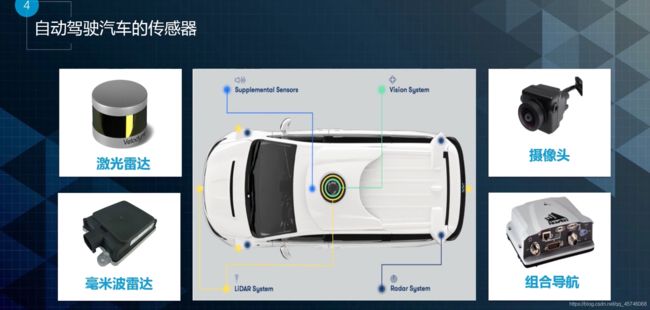
三、自动驾驶的硬件系统
大家可以看到每个模块都有很多对于的硬件设备,例如速度传感器可以在汽车发生碰撞时弹出气囊来保护人的头部;还有生物电传感器等可以判断你的手是否离开方向盘,或者你的情绪或身体状况等;黑匣子就是对汽车事故的记录,例如飞机的黑匣子一样,硬件很多,就不一一介绍了。
接下来对核心传感器进行介绍:
| 设备 | 作用 | 特点 | 核心 |
|---|---|---|---|
| 摄像头 | 车道线和交通标识牌、红绿灯以及车辆和行人检测 | 检测信息全面、价格便宜、受天气影响大 | 镜头、镜头模组、滤光片、CMOS/CCD、ISP数据传输 |
| 激光雷达 | 经过发射激光波对前面障碍物进行检验 | 同轴旋转、相控阵、棱镜旋转和MEMS | 波的反射与时间计算 |
| 毫米波雷达 | 检测车辆 | 检测速度快,准确,不受天气干扰,但无法识别车道线 | 发射芯片、计算机运算等对距离的计算 |
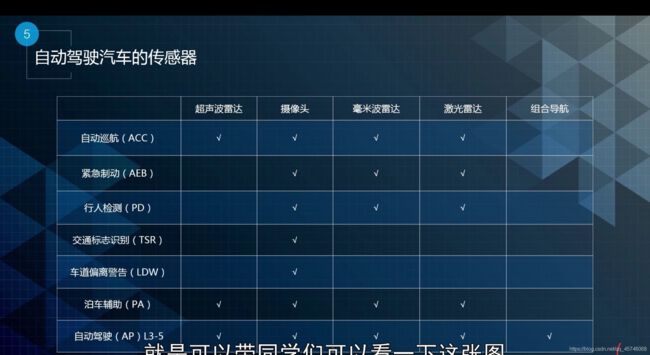
上图就是传感器支持的功能展示图。
例如刹车人传感器的测试数据:
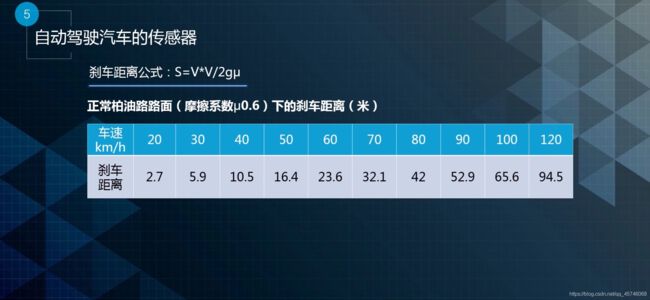
该图便展示了不同的速度刹车距离的大小,我们便可以利用数据结合自动驾驶汽车整个系统的运行时间得到以下结果:

我再根据汽车测量物体的性质和不足,找到漏检的死角,再对其算法进行优化,便得到了以下的关系:
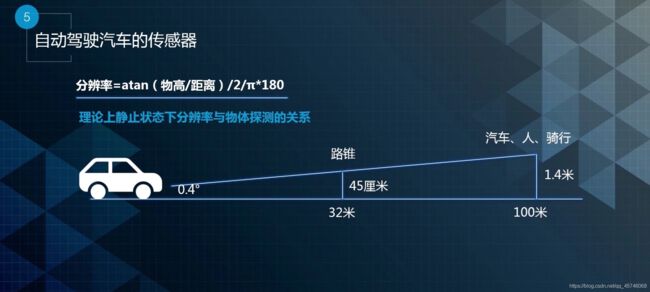
可以看到我们探测器仰角在0.4°时,它在32米处能测到路锥,一百米便能看到人。而当仰角变为0.1°时,结果如下:

接着我们看看自动驾驶的计算单元:
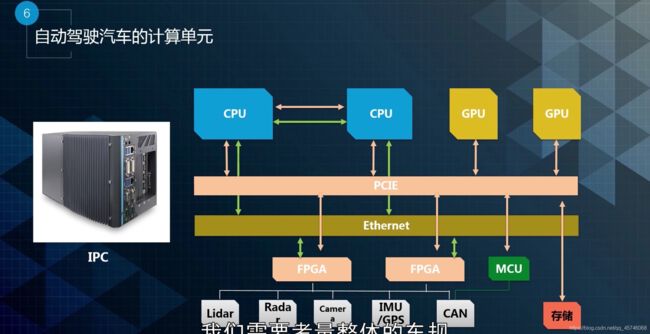
Apollo在对这些计算单元进行连接的同时,也对各个计算器做了冗余的处理,确保数据能够准确少误差。该集中式的控制,将各个计算单元与总控机中进行处理协调。
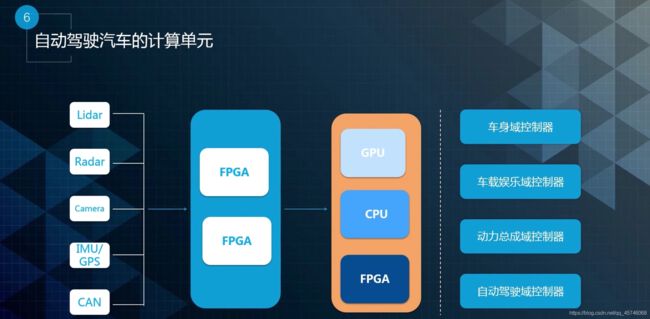
根据时间戳的性能将各个传感器的数据汇总到处理器中进行处理,最终产生控制结果的过程如上图所示;

上图式芯片设计的流程,这样设计的目的也是为了无人车的量产而准备的。
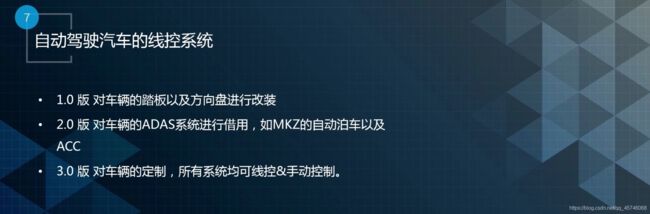
线控系统也是由计算机得出的数据指令进行控制,而不是由物理的操作去执行的,设备如上图所示;
现如今很多汽车研发都是利用这种EPS和线控转向的系统来配置无人汽车的,肯定有很多优势所在,经过研究对油门或者刹车等制动深浅来判断汽车制动的力度,从而实现计算机芯片的控制。
总结Apollo各个线控系统版本所带来的不同改进,大致的改进内容如下图所示:
下一步,Apollo开发平台将为用户打造更加全面和具有优势的共享单元,例如对拓展单元(AXU)的发布等。
它的目的就是优化对时间戳的校准,确保各个传感器的数据能够同步使用或开发优化等;
本次主要是对汽车的核心内容和Apollo的研发观念进行学习,希望大家会对该开发平台继续感兴趣。