哈工大robomaster慕课学习笔记
哈工大robomaster慕课
- 理论部分
- 机器人
- 控制器
- GPIO
- 控制器
- 通讯
- 传感器:将物理量,生物量,化学量转化为电信号
- 执行器
- 电机
- 控制技术
- 移动机器人底盘
理论部分
机器人
由电子计算机控制,能代替人工工作的自动机械.
有大脑 能取代人工 自动机械设备
1920提出1973用在流水线
示教型机器人→具有感知能力的机器人→智能机器人
工业机器人 特种机器人
控制器-大脑
执行器-动作元件
传感器-反馈机制
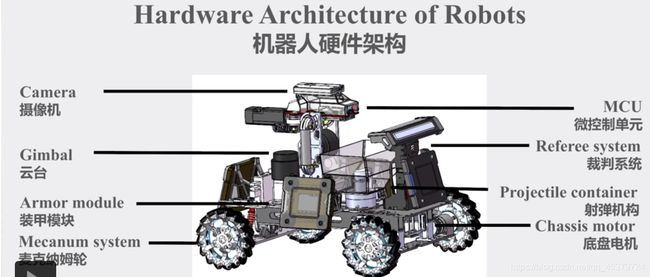
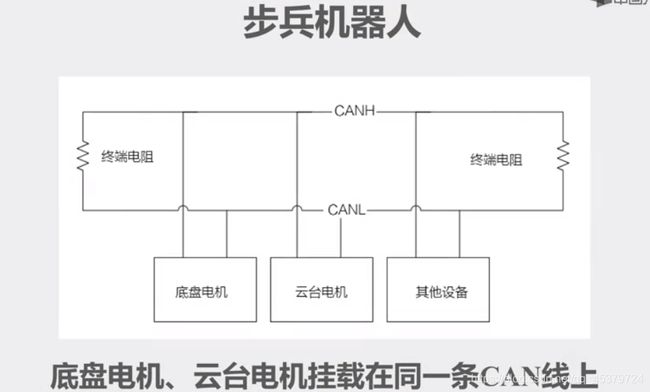
以步兵机器人为例
控制器-主控板:所有命令的发起单元,所有信号的处理单元
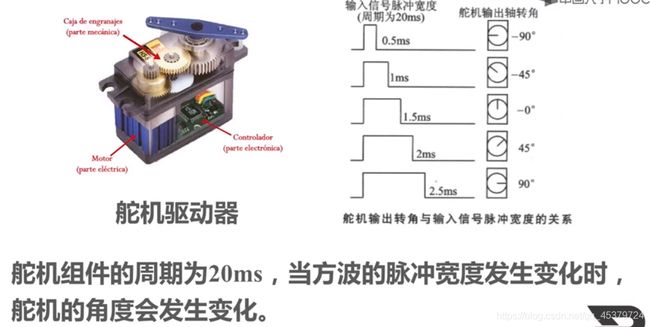
执行器-舵机
传感器-循迹,摄像头
控制器
汇总机器人收到的传感器信息或命令
执行控制器的动作,协调指挥整个机器人系统

MCU:微控制器,将计算机的许多功能集中在一个芯片上的单芯片.其作用是将信号进行汇总,计算和判断.
51→MSP430→STM32
外设:外部设备,指连在计算机主机以外的硬件设备.对数据和信息起着传输,转送和存储的作用,是计算机系统中的重要组成部分.
协助MCU进行信息处理
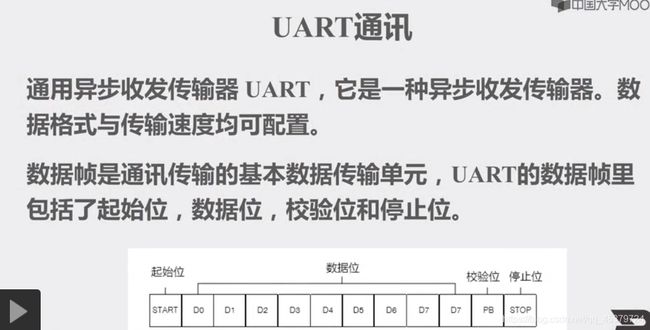
数据通讯:UART,SPI,CAN通讯电路
模拟信号采集:AD(模拟数字转换)电路
数据获取:传感器数据处理电路
功率驱动:驱动电路
姿态传感器
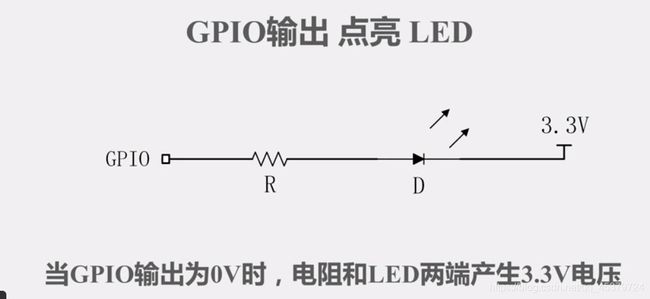
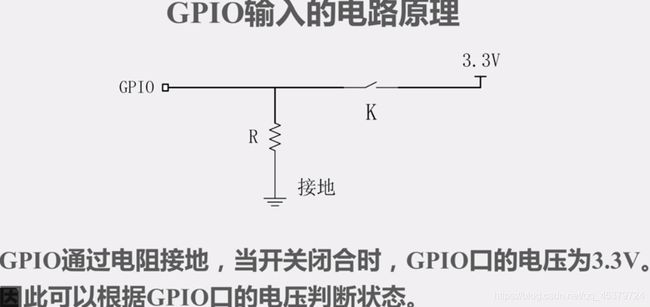
GPIO
输入:外界信息的反馈进入
输出:主控板发送信号反馈

控制器
MCU资源-定时器,芯片内资源
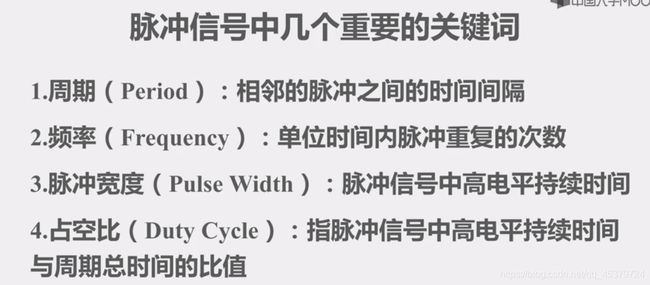
脉冲宽度调制PWM,舵机
脉冲
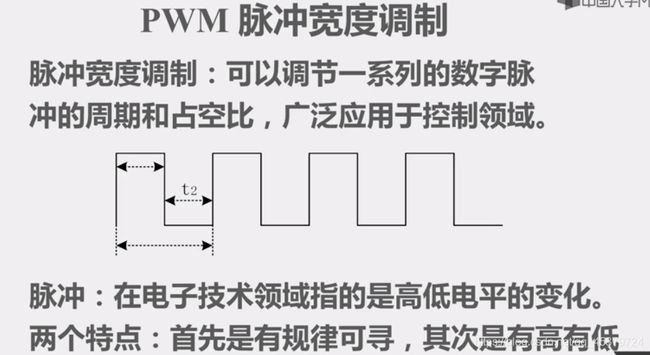
脉冲宽度
三色灯,蜂鸣器(音色,音调 频率决定,响度 振幅决定)

晶振:晶体振荡器
通讯
信息和数据传输的过程,往往以信号的形式.
有线通讯:利用金属导线,光纤等有形的传播介质传送信息的通讯方式.控制器能够识别的信号只有高电平和低电平.
串行通讯(依次进行):
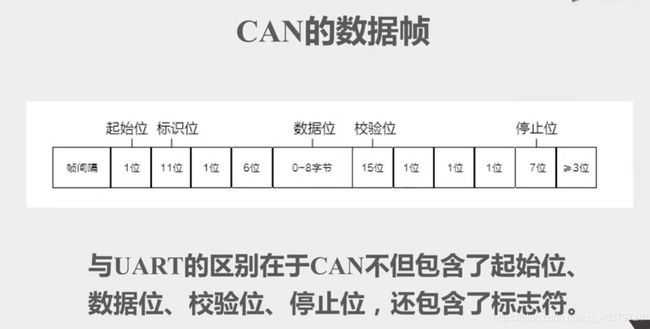
UART和CAN都是异步通讯
同步通讯和异步通讯
通讯协议:控制器需要读取通讯线上的电平信号,根据电平信号的不同查“字典”,翻译出信号的信息。这个字典便是协议。
并行通讯(同时进行)
无线通讯
CAN是总线通讯

串口,串口转USB接口,RM精灵调试助手
uart_init(USER_UART3,9600,WORD_LEN_8B,STOP_BITS_1,PARITY_NONE)
UART3.3V CAN5V供电
传感器:将物理量,生物量,化学量转化为电信号
误差:元件误差,环境误差,方法误差(圆周),人为误差
光电传感器:发射器与接收器
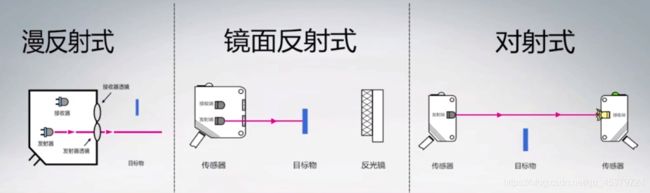
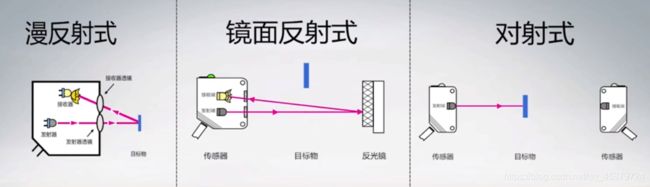
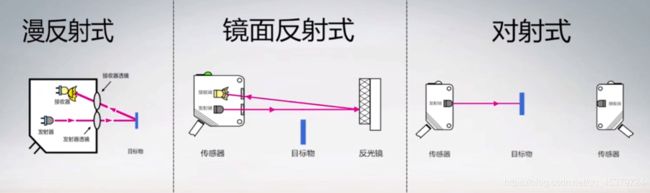
避障,计数,测速
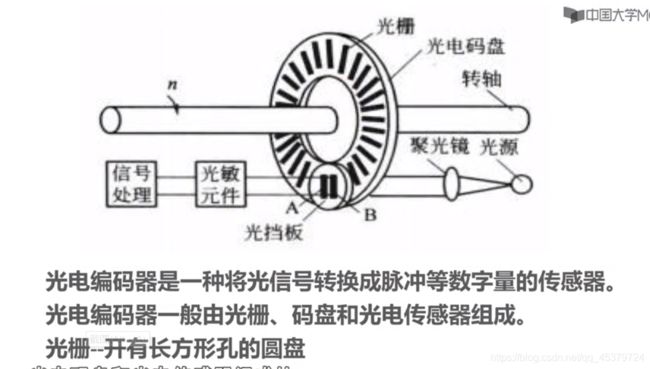
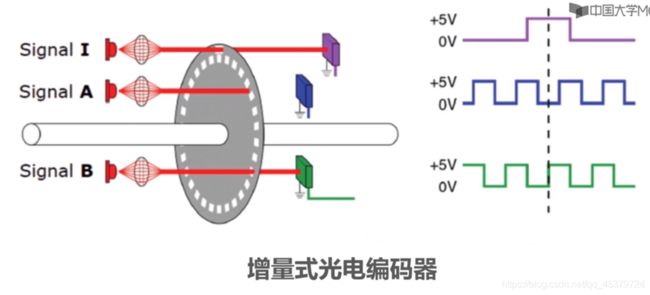
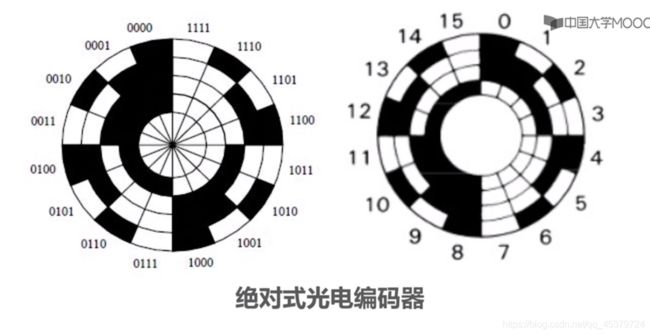
光电编码器
磁传感器
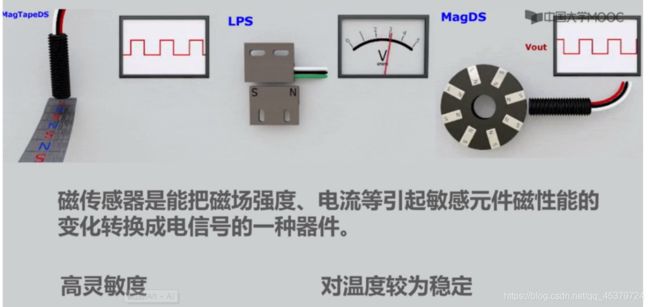
中间线性霍尔
左右开关霍尔:高低电平变化的开关量
惯性传感器
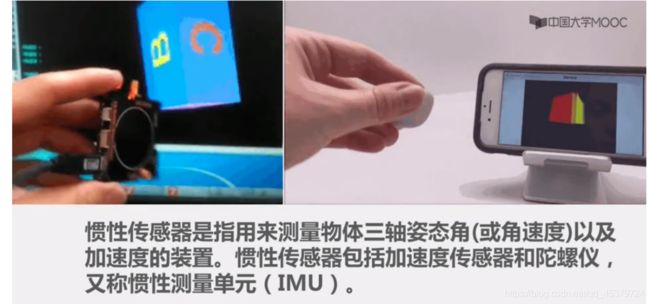
Pitch轴 点头 yaw轴 摇头 raw轴 晃头
加速度经过积分得到速度和位置
角度经过微分可以得到角速度和角加速度
利用IMU测量和计算上述量从而达到对物体导航定位的目的。
IMU大多用在需要进行运动控制的设备上,如机器人和汽车上。也被用在需要用自身数据进行精确定位的场合,如飞机、导弹、潜艇的惯性导航设备等。
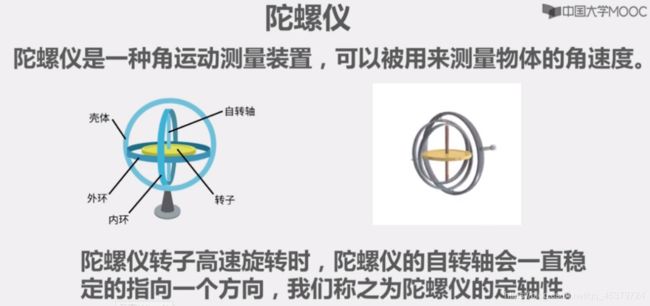
定轴性
执行器
机械部分提供机械支撑
驱动部分提供机械力
气动式
气缸气阀气管
液压式
电动式机器人
功率比较小
电机
把电能转化为势能
底盘RM3508:35外直径 08高度 无刷电机
云台6623 无刷电机
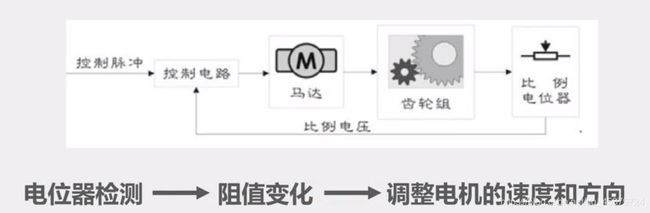
舵机
定子和转子
外转子电机 内转子电机
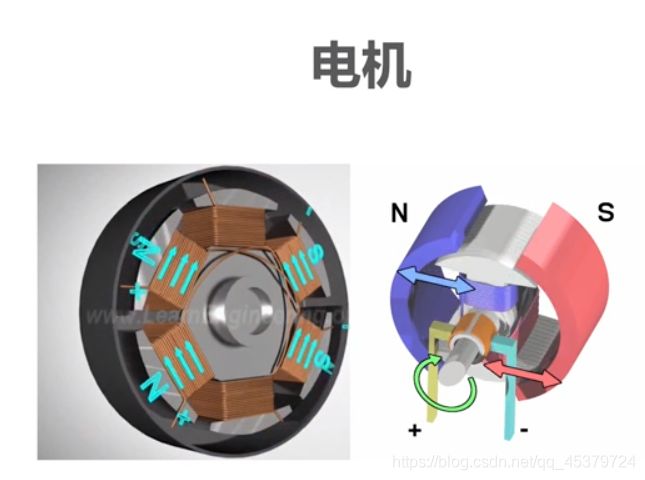
电刷和换向器
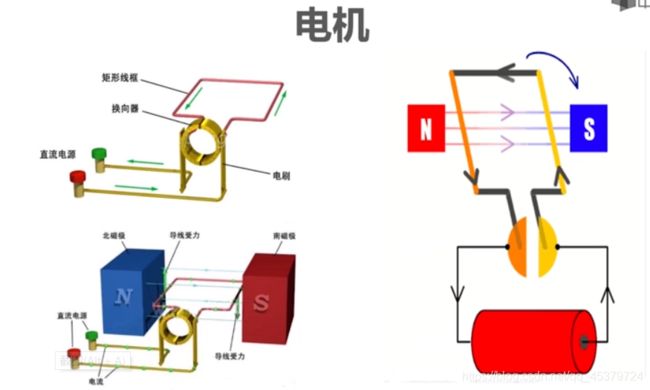
有刷电子
有感电机 无感电机
同步电机 异步电机
舵机
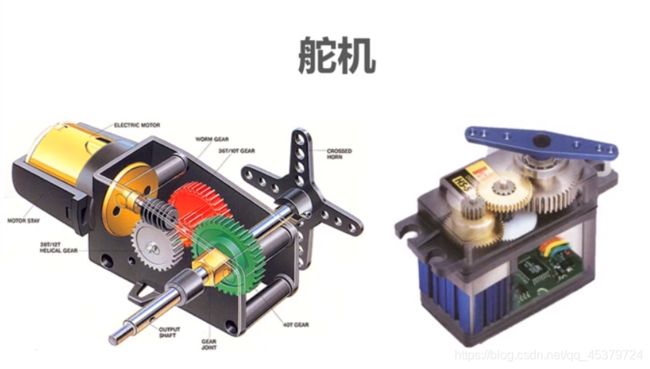
一根线达到控制目的
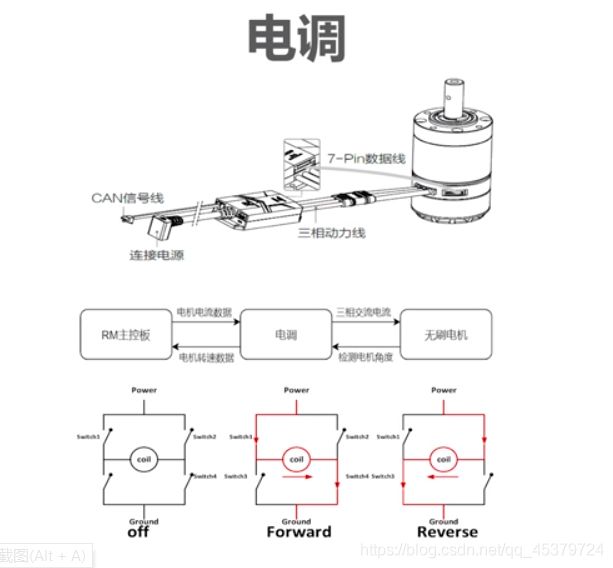
电调:电子调速器
C620电调 最大电流20A 强弱电转换
动力线(粗) 信号线
CAN接口
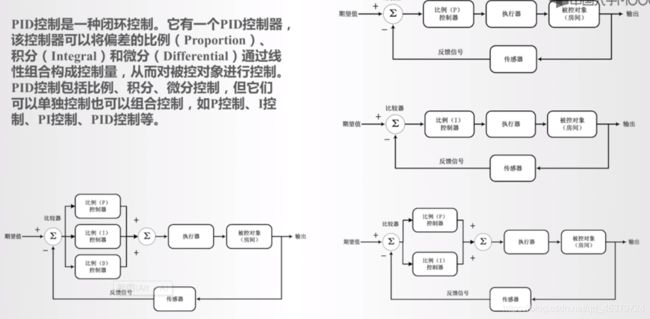
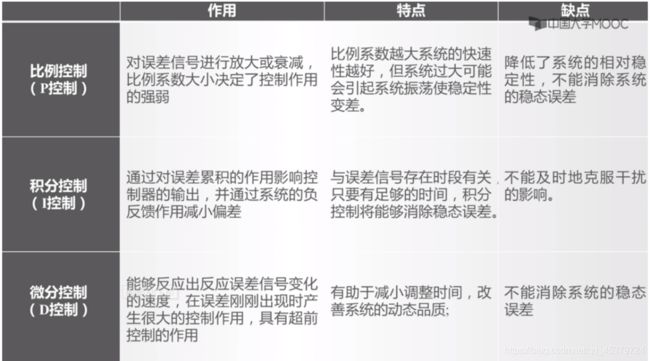
控制技术
自动控制装置
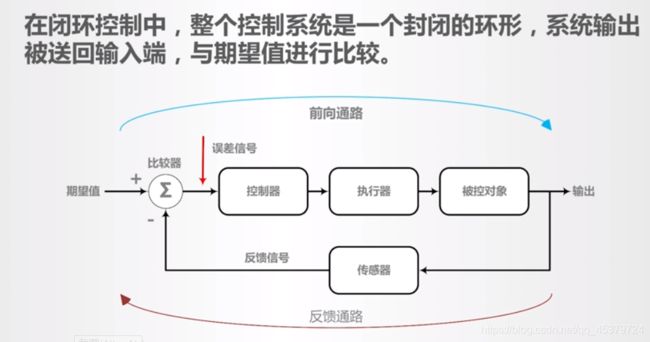
被控对象 输出/被控量
参考输入/期望值
目的
稳定性,准确性,快速
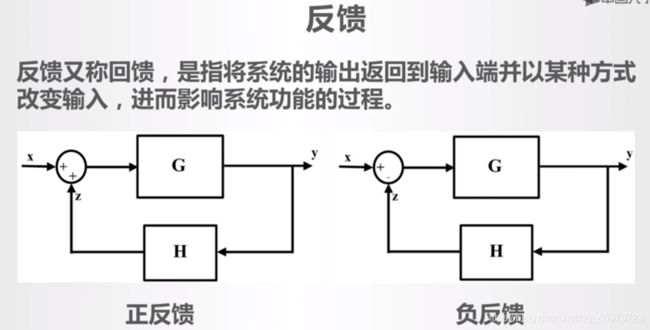
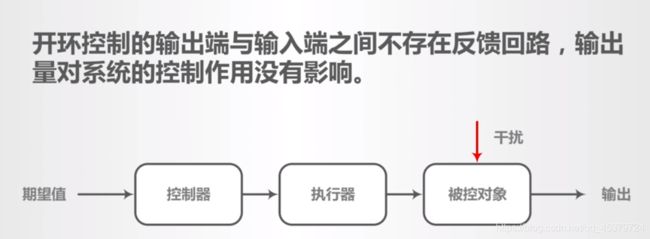
开环控制:没有反馈

移动机器人底盘
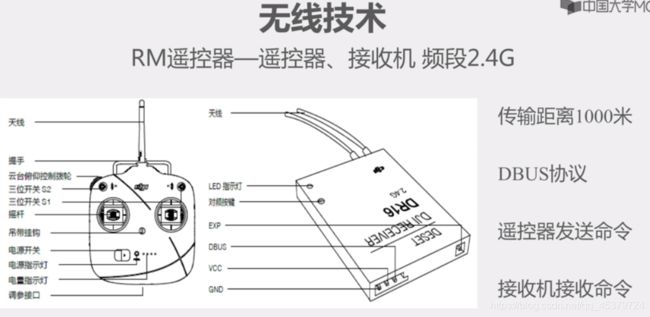
无线通讯技术
调制解调
天线的长度等于传输信号波长的整数倍
频率越高,通讯越远
轮式:简单
越野性能差
履带式
速度低
腿足式:复杂
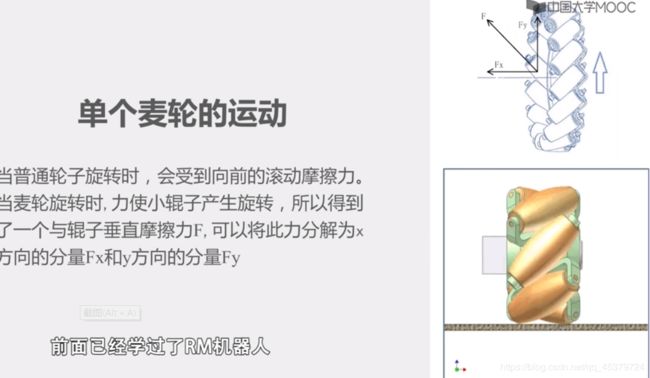
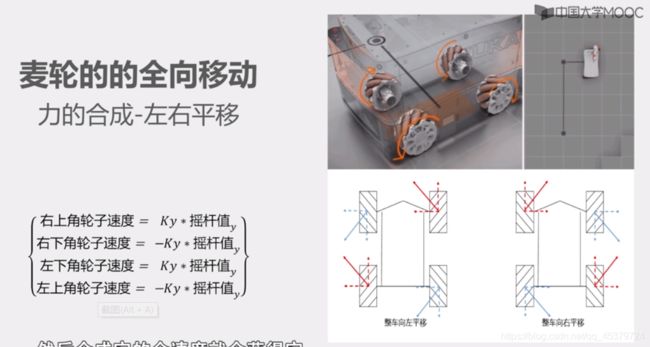
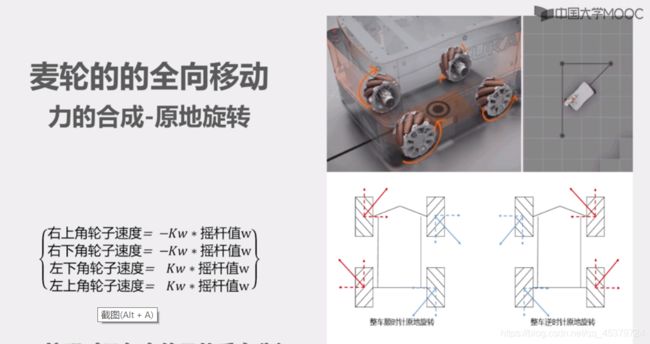
全向移动
瑞典轮
全向轮
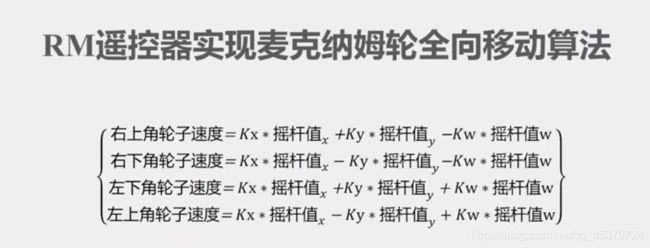
麦克纳姆轮
三轮,四轮

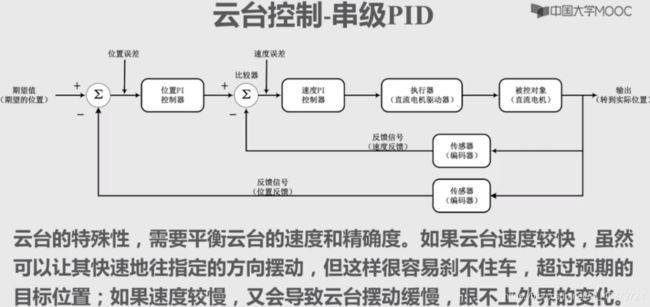
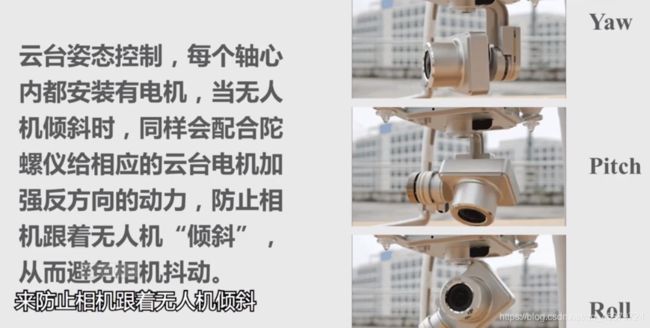
云台




生物上,无论怎么移动鸡的身体,头部都保持不动

云台控制-传感器
电机编码器:它会展示电机转了多少度;
磁力计:类似指南针,会展示对于地面来说,云台转多少度
陀螺仪:它会展示云台的角速度;
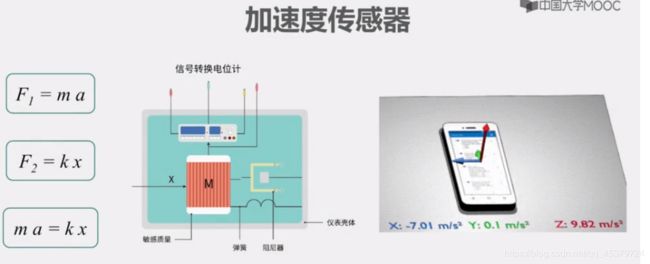
加速度计:它会展示云台的加速度。
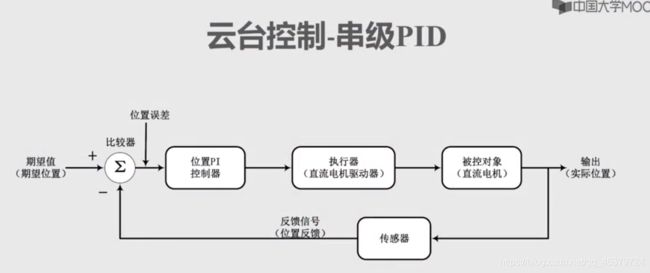
底盘电机是要控制速度
云台电机是要控制位置