点扩散函数 PSF(point spread function)
*持续性补充拓展,以下部分来自wiki:https://en.wikipedia.org/wiki/Point_spread_function
点扩展函数(point spread function PSF)描述了成像系统对点源或点对象的响应。PSF更一般的术语是一个系统的脉冲响应(impulse response),PSF是聚焦光学系统的脉冲响应。PSF 在许多情况下可以被当作是图像中表示一个未解决对象的扩散斑(extended blob )。从功能上讲,它是成像系统光学传递函数的空间域形式。它在傅立叶光学、天文成像、医学成像、电子显微镜和其他成像技术如三维显微镜(如共聚焦激光扫描显微镜)和荧光显微镜中是一个有用的概念。点目标的扩散/模糊程度是衡量成像系统质量的一个指标。在荧光显微镜、望远镜或光学显微镜等非相干成像系统( non-coherent imaging systems)中,图像的形成过程被线性系统理论描述为在功率上是线性的。这意味着当两个物体A和B同时成像时,结果等于独立成像物体的总和。换句话说,A的成像不受B的成像影响,反之亦然,这是由于光子的非相互作用性质(non-interacting property)。一个复杂对象的像可以被看作是真实对象和PSF的卷积。然而,当被检测到的光是相干的(coherent),图像在复数域( complex field)的形成是线性的。记录灰度图(intensity image),然后可以引发 cancellations 或其他非线性效应。
介绍
由于光学成像系统的线性特性:

在显微镜或望远镜中,物体的像可以通过将物体平面场表示为对二维脉冲函数的加权和,然后将像平面场表示为对这些脉冲函数的图像的加权和来计算。这就是所谓的叠加原理(superposition principle),适用于线性系统。单个物面(object-plane)脉冲函数的像被称为点扩散函数,反映这样一个事实,物面上一个光的理想点(mathematical point)被扩散成像平面上一个有限的区域 (在某些数学和物理学的分支上,这些可能被称为格林函数(Green's functions)和脉冲响应函数(impulse response functions))。
当物体被分割成不同强度的离散点物体时,图像被计算为每个点的PSF之和。由于PSF通常完全由成像系统(即显微镜或望远镜)决定,因此可以通过了解系统的光学特性来描述整个像。这个过程通常用卷积方程表示。在显微镜图像处理和天文学中,了解测量装置PSF对于去卷积恢复(原)图像具有重要意义。对于激光光束,PSF可以用高斯光束的概念进行数学建模。如下图Fig.1所示,对数学建模的PSF与图像进行反褶积,将分辨率从2.2 mm提高到0.2 mm。
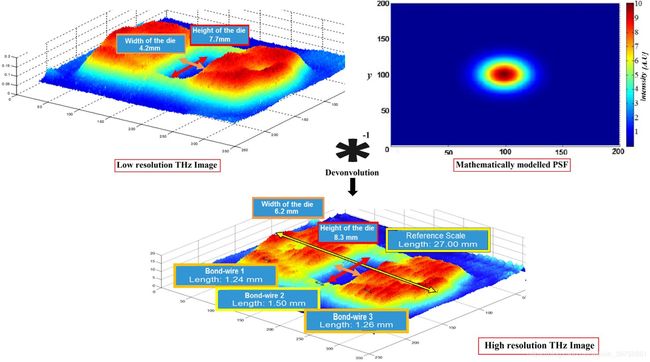
Fig.1 PSF的应用:对数学模型PSF和低分辨率图像进行反褶积,提高了图像的分辨率。
理论
点扩展函数可以独立于物面上的位置,这种情况称为位移不变性(shift invariant)。此外,如果系统不存在畸变,则像平面坐标通过放大M与物平面坐标线性相关:

如果成像系统产生了一个倒转的图像,我们可以简单地把图像平面坐标轴看作是与目标平面坐标轴相反的。根据这两个假设,即PSF是位移不变的并且不存在畸变,计算图像平面卷积积分是一个直截了当的过程。
在数学上,我们可以将物平面域表示为:

即作为加权脉冲函数的和,虽然这实际上也只是说明了二维delta函数( 2D delta functions)的移动特性(下文将进一步讨论)。将物透射函数(object transmittance function)改写为上述形式,可以将像平面域计算为各个脉冲函数图像的叠加,即作为像平面的加权点扩展函数(weighted point spread functions)使用与物平面中相同的权重函数的叠加,即![]() 。数学上,图像表示为:
。数学上,图像表示为:

- PSF(xi /M − u, yi /M − v) 是脉冲函数 δ(xo − u, yo − v) 的像。
二维脉冲函数可以看作是“方柱”函数("square post" function)的极限(因为边维w趋于零),如下图Fig.2所示。

Fig.2 方柱函数
我们假设物平面被分解成这样的正方形区域,每个区域都有自己相关联的方柱函数。如果柱子的高度h保持在1/w2,那么当w趋于0时,柱子的高度h趋于无穷,使得体积(积分)在1处保持不变。这使得二维脉冲具有筛选特性(sifting property )(在上面的方程中隐含),也就是说,当二维脉冲函数 δ(x − u,y − v),对任何其他连续函数积分 f(u,v),它“筛选”出脉冲位置f的值,即,点(x,y)。
由于完美的点源目标( point source object)的概念是PSF思想的核心,因此在进一步深入之前,有必要在这方面花一些时间。首先,自然界中没有完美的数学点源辐射器;这个概念完全是非物理的,只不过是一个用于建模和理解光学成像系统的数学构想(mathematical construct)。点源概念的效用来自于这样一个事实:二维物平面上的点源只能辐射出一种完美的等幅球面波(uniform-amplitude, spherical wave)——这种波具有完美的球形、向外运动的相位前沿,在球面上各处的强度都是一致的(参见惠更斯-菲涅尔原理)。这种均匀球面波源如图Fig.3所示。我们还注意到,一个完美的点源辐射器不仅会辐射出传播平面波的均匀谱,而且还会辐射出指数衰减(消失)波的均匀谱,正是这些均匀谱导致了分辨率小于一个波长(见傅立叶光学)。这是从二维脉冲函数的傅里叶变换表达式得到的:

二次透镜拦截了球面波的一部分,并将其重新聚焦到图像平面上的一个模糊点上。对于单个透镜,物平面中轴上点源在像平面上产生一个艾里斑(Airy disc)PSF。这是通过以下方式实现的。可以看出(参见傅立叶光学、惠更斯-菲涅尔原理、夫琅和费衍射),平面物体辐射的场(或通过相互作用,收敛到平面图像上的场)通过傅立叶变换(FT)关系与其对应的源(或图像)平面分布有关。此外,圆面积上的均匀函数(在一个FT域中)对应于Airy函数(Airy function),在另一个FT域中对应于J1(x)/x,其中J1(x)是第一种一阶贝塞尔函数(Bessel function)。也就是说,一个均匀照明的圆形孔径通过一个汇聚的均匀球面波,在焦平面上得到一个Airy函数图像。因此,上图所示的会聚(部分)球面波在像平面上产生一个Airy圆盘。Airy函数的参数很重要,因为它决定了Airy圆盘的缩放(换句话说,圆盘在图像平面上的大小)。如果Θmax最大角的收敛波使镜头轴线,r是径向距离图像平面,和波数k = 2π/λ,λ=波长,然后亚里函数的参数是:kr tan(Θmax)。如果Θmax很小(只有一小部分可用的会聚球面波形成的图像,然后径向距离r,有非常大的总论点通风函数之前远离中央的位置。换句话说,如果Θmax很小,艾里斑会很大(这只是海森堡FT对不确定原理的另一种表述,即一个域中的小范围对应另一个域中的大范围,这两个小范围通过空间带宽乘积相关)。由于这个,高放大系统,通常有小的值Θmax(通过阿贝正弦条件( Abbe sine condition)),由于广泛的PSF,图像中可能有更多的模糊。PSF的大小与放大成正比,因此模糊在相对意义上并不更坏,但在绝对意义上确实更糟。
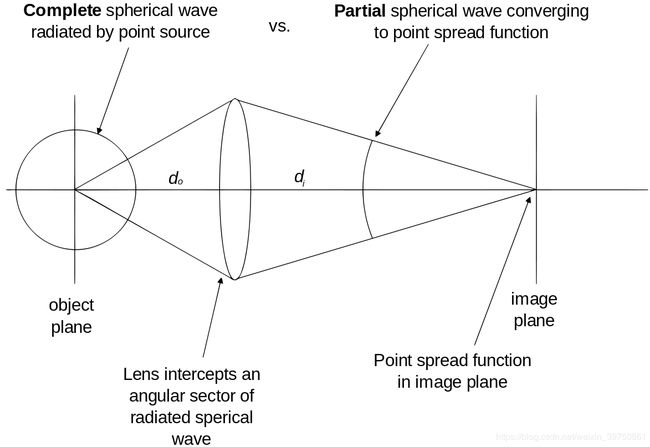
Fig.3 球面波经透镜截断
在上图中,我们可以注意到一个非常重要的事实,即透镜截断入射球波。为了测量透镜的点扩散函数或脉冲响应函数,我们不需要一个完美的点源,它可以在空间的所有方向上辐射一个完美的球面波。这是因为我们的镜头只有有限的(角)带宽,或有限的截距角(intercept angle)。因此,光源中任何超过透镜边缘角的角带宽(即,位于系统带宽之外),基本上是浪费了源带宽,因为透镜无法截取它来处理它。因此,不需要一个完美的点源来测量一个完美的点扩展函数。我们只需要一个光源,它的角频宽至少与被测透镜的角带宽相同(当然,在这个角频区是均匀的)。换句话说,我们只需要一个由收敛(均匀)球面波产生的点源,其半角大于透镜的边缘角。
由于成像系统的固有分辨率有限,测量的PSFs并非没有不确定性。在成像技术中,需要用Apodization技术抑制成像光束的侧叶。对于高斯光束分布的传输成像系统,PSF的建模公式为:

其中k因子取决于截断率和辐照度水平,NA为数值孔径,c为光速,f为成像光束的光子频率,Ir为参考梁的强度,a为调整因子,是从对应的z平面上光线中心的径向位置。