强化学习系列之六:策略梯度
文章目录 [隐藏]
- 1. 策略参数化
- 2. 策略梯度算法
- 2.1 MC Policy Gradient
- 2.2 Actor-Critic
- 3. 为什么要有策略梯度
- 4. 总结
- 强化学习系列系列文章
上一篇文章介绍价值函数近似,用模型拟合价值函数。这篇文章我们介绍梯度策略,用模型直接拟合策略。
1. 策略参数化
强化学习有两种场景。一种是离散的强化学习场景。在这种场景下,我们从状态抽取状态特征向量  。和价值函数近似,我们让
。和价值函数近似,我们让  特征向量一共有 |A| 部分,分别对应不同的动作。在 特征向量, a 动作对应位置放 特征,其他动作对应位置为 0。设定参数
特征向量一共有 |A| 部分,分别对应不同的动作。在 特征向量, a 动作对应位置放 特征,其他动作对应位置为 0。设定参数  。
。

其中  表示遇到状态特征 采取动作 a 的概率。策略用了著名的 Softmax 函数,因此也被称为 softmax 策略。容易求得 Softmax 函数对数的梯度。
表示遇到状态特征 采取动作 a 的概率。策略用了著名的 Softmax 函数,因此也被称为 softmax 策略。容易求得 Softmax 函数对数的梯度。

另一种是连续的强化学习场景。在连续强化学习场景下,我们也是从状态抽取状态特征向量 ,然后设定一个参数向量 ,然后用特征和参数计算不同动作的概率。

其中动作 a 是一个实数值。策略用了标准差为 1 的高斯分布,因此该策略被称为高斯策略。容易求得高斯策略的对数梯度。

强化学习就是学习参数 的值。那么我们按什么样的目标学习参数 呢? 我们有如下三种目标。其中第一个目标适用于每次从一个开始状态出发的强化学习,另外两种目标适用于其他场景。
![\begin{eqnarray*} J_1(\pmb{w}) &=& V^{\pi_{\pmb{w}}}(s1) = E_{\pi_{\pmb{w}}}[v1] \nonumber \\ J_{avV}(\pmb{w}) &=& \sum_{s} d^{\pi_{\pmb{w}}}(s) V^{\pi_{\pmb{w}}}(s) \nonumber \\ J_{avR}(\pmb{w}) &=& \sum_{s} d^{\pi_{\pmb{w}}}(s) \sum_{a} \pi_{\pmb{w}}(s,a) R_{s,a} \nonumber \end{eqnarray*}](http://img.e-com-net.com/image/info8/7535b4c47b834e98a2928ca7c50e3e4c.png "Rendered by QuickLaTeX.com")
其中  是策略
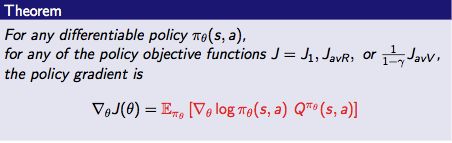
是策略  稳定概率。虽然我们有三种目标函数,但是下面的策略梯度定理揭示这些目标函数的梯度是一致。只要我们求得梯度,就可以应用梯度下降相关算法了。
稳定概率。虽然我们有三种目标函数,但是下面的策略梯度定理揭示这些目标函数的梯度是一致。只要我们求得梯度,就可以应用梯度下降相关算法了。
根据策略梯度定理,我们只要计算出  和价值
和价值  ,就可以求解策略梯度优化问题了。Softmax 和高斯策略的 计算公式在上面已经介绍了。Softmax 策略的更新代码。
,就可以求解策略梯度优化问题了。Softmax 和高斯策略的 计算公式在上面已经介绍了。Softmax 策略的更新代码。
//policy 待更新的策略 //f 状态特征 //a 动作 //qvalue q值 //alpha 学习率 def update_softmaxpolicy(policy, f, a, qvalue, alpha): fea = policy.get_fea_vec(f,a); prob = policy.pi(f); delte_logJ = fea; for i in xrange(len(policy.actions)): a1 = policy.actions[i]; fea1 = policy.get_fea_vec(f,a1); delta_logJ -= fea1 * prob[i]; policy.theta -= alpha * delta_logJ * qvalue;
2. 策略梯度算法
为了求解策略梯度优化问题,我们需要计算 和价值 。按照上述内容,我们能够求得 ,那怎么求解价值 呢?
2.1 MC Policy Gradient
蒙特卡罗策略梯度适用于插曲式的强化学习场景。插曲式强化学习场景中,系统会从一个固定或者随机起始状态出发,经过一定的过程之后,进入一个终止状态。比如,机器人找金币例子就是插曲式强化学习场景。蒙特卡罗策略梯度让系统探索环境,生成一个从起始状态到终止状态的状态-动作-奖励序列。

在第 t 时刻,我们让  等于
等于  ,从而求解策略梯度优化问题。蒙特卡罗策略梯度代码如下。
,从而求解策略梯度优化问题。蒙特卡罗策略梯度代码如下。
def mc(grid, policy, num_iter1, alpha): actions = grid.actions; gamma = grid.gamma; for i in xrange(len(policy.theta)): policy.theta[i] = 0.1 for iter1 in xrange(num_iter1): f_sample = [] a_sample = [] r_sample = [] f = grid.start() t = False count = 0 while False == t and count < 100: a = policy.take_action(f) t, f1, r = grid.receive(a) f_sample.append(f) r_sample.append(r) a_sample.append(a) f = f1 count += 1 g = 0.0 for i in xrange(len(f_sample)-1, -1, -1): g *= gamma g += r_sample[i]; for i in xrange(len(f_sample)): update(policy, f_sample[i], a_sample[i], g, alpha) g -= r_sample[i]; g /= gamma; return policy
2.2 Actor-Critic
价值函数近似的强化学习算法用于估计状态-动作价值 q(s,a)。策略梯度算法引入价值函数近似提供价值是一个很好的思路。这时候,算法分为两个部分:Actor 和 Critic。Actor 更新策略, Critic 更新价值。Critic 就可以用之前介绍的 SARSA 或者 QLearning 算法。下面是 SARSA 算法代码示例。
def sarsa(grid, policy, value, num_iter1, alpha): actions = grid.actions; gamma = grid.gamma; for i in xrange(len(policy.theta)): value.theta[i] = 0.1 policy.theta[i] = 0.0; for iter1 in xrange(num_iter1): f = grid.start(); a = actions[int(random.random() * len(actions))] t = False count = 0 while False == t and count < 100: t,f1,r = grid.receive(a) a1 = policy.take_action(f1) update_value(value, f, a, \ r + gamma * value.qfunc(f1, a1), alpha); update_policy(policy, f, a, value.qfunc(f,a), alpha); f = f1 a = a1 count += 1 return policy;
3. 为什么要有策略梯度
策略梯度的第一个优势是其能够处理连续场景。价值函数近似就不适用了连续的强化学习场景。因为  是一个无限集合的情况下,我们无法计算
是一个无限集合的情况下,我们无法计算  了。但如果我们使用的是策略梯度,
了。但如果我们使用的是策略梯度, 输出实数值。当然这一部分可以通过改进价值函数形式的方式解决。
输出实数值。当然这一部分可以通过改进价值函数形式的方式解决。
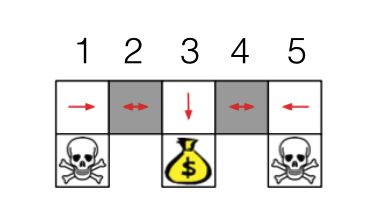
策略梯度的另一好处是概率化输出。在预测时,价值函数近似应用了贪婪策略或者 贪婪策略,选择价值最大的方向。有时候这可能会导致问题。还是拿机器人找金币做例子(如下图所示),状态特征是北(东,南,西)方向是否面对墙。状态 2 和 状态 4 的状态特征一样,贪婪策略或者 贪婪策略采取相同动作。如果动作是向右,则状态 4 之后会陷入 4 和 5 之间的循环。如果动作是向左,则状态 2 之后会陷入 1 和 2 之间的循环。但是如果我们采用策略梯度,在状态 2 和状态 4,学习到的策略输出向右和向左动作的概率都是 0.5,从而不会陷入循环。
贪婪策略,选择价值最大的方向。有时候这可能会导致问题。还是拿机器人找金币做例子(如下图所示),状态特征是北(东,南,西)方向是否面对墙。状态 2 和 状态 4 的状态特征一样,贪婪策略或者 贪婪策略采取相同动作。如果动作是向右,则状态 4 之后会陷入 4 和 5 之间的循环。如果动作是向左,则状态 2 之后会陷入 1 和 2 之间的循环。但是如果我们采用策略梯度,在状态 2 和状态 4,学习到的策略输出向右和向左动作的概率都是 0.5,从而不会陷入循环。
4. 总结
本文介绍了梯度策略相关知识。本文代码可以在 Github 上找到,欢迎有兴趣的同学帮我挑挑毛病。
最后欢迎关注我的公众号 AlgorithmDog,每周日的更新就会有提醒哦~