- MarsCode青训营打卡Day1(2025年1月14日)|稀土掘金-16.最大矩形面积问题
Aqua Cheng.
MarsCode青训营算法java
资源引用:最大矩形面积问题-MarsCode打卡小记录:今天是开营第一天,和小伙伴们组成了8人的团队,在接下来的数十天里相互监督,打卡刷题!稀土掘金-16.最大矩形面积问题(16.最大矩形面积问题)题目分析:这是一道双指针问题。给定一个有n个元素的array数组,其中的每一个元素都代表一个高度。现要求从array数组中任意选取k个相邻元素,定义它们所形成的最大矩形面积R(k)=k*min(k个元素
- C/C++三方库编译构建
harmonyos
课程简介本课程是【HarmonyOSTechTalk】的第19课。本次交流聚焦于C/C++三方库在HarmonyOS开发中的应用。首先是适配HarmonyOS工具链,这是将开源三方库融入鸿蒙生态的关键步骤,确保其兼容性与稳定性。DevEcoStudio则是构建的得力助手,可用于打造自定义三方库,满足特定开发需求。在Native工程里使用这些三方库,能拓展功能、提升效率。通过本次课程学习,开发者能够
- 2021-07-09
2018心如止水
张雲芳焦点解决网络课程学习坚持分享第816天20210709本周第2次(约练总291)渴了喝水;饿了吃饭;累了休息。看似简单的选择与行为,做起来却没那么容易。尤其是作为成年人,每天有工作需要完成,有孩子、家人需要陪伴,有时候各种事情赶在一起,忙的晕头转向、焦头烂额,即使自己特别累,也没有间隙去休息一下下,想象一下身体疲惫,精力耗竭是什么样的状态?对于孩子的哭闹你还会有更多的耐心吗?我想多数情况下都
- 主流行架构
rainbowcheng
架构架构
nexus,gitlab,svn,jenkins,sonar,docker,apollo,catteambition,axure,蓝湖,禅道,WCP;redis,kafka,es,zookeeper,dubbo,shardingjdbc,mysql,InfluxDB,Telegraf,Grafana,Nginx,xxl-job,Neo4j,NebulaGraph是一个高性能的,NOSQL图形数据库
- 【生活小记录】记录一下今天我是怎么度过的吧!(2022134)
恋上清咖
每周都是盼着休息日快点到来,可是这一天来了无论怎么过总会觉得这一天没过好!觉得如果再给我一次机会我一定会过得更好!就这样每一个休息日都在这样周而复始的状态中过去了!所以我就想好好记录一下这一天,我倒要看看这一天怎么过才算是过得好,才算是让自己满意的一天!好吧!开始记录:起床时间:早上7点,小猫咪依然是在平常6点零五分的时刻对着我叫了两声让我起床,毕竟休息日嘛!怎可辜负这能睡懒觉的美好时光,一巴掌把
- 艺术节开幕词
送柳音
老师、同学们:下午好!春夏之交,我们刚刚送走了2022“跟着书本去旅行”四月读书节,又迎来了“童心献礼二十大幸福成长向未来”五月艺术节。“孟夏草长,花开五月。万物竞茂,于斯为盛。”搭建校园文化节舞台,助力你们童年的多彩,朝向你们幸福成长的美好未来,这是我们每一位老师的美好心愿。每年艺术节,是我们展示课后服务课程学习成效的节日,这已经成为了我们的约定俗成。每周三门课后服务课程,每门课程上两三节课,吹
- 毕业三年,我换了四份工作
丁远_
蓦然回首,已经是毕业后第三年又要将尽的时分了。不知从什么时候起,90后也被贴上了不踏实,频繁跳槽的标签。的确,对比起父辈的国家分配,终身奉献在同一个岗位,我想说我们这群人真的是职场上的“短命鬼”了。盘点了下同班一起毕业的十几个同学,好像除了回家继承“家业”的那少数几个,剩下的都至少换了两份以上工作。L是当时班上专业课程学习最好的女同学,第一份工作是在一个私营医疗机构当医疗翻译,单休,每天从早到晚都
- llm-universe学习小记录4--构建RAG应用
Adela0546
学习语言模型
构建RAG应用一、将LLM接入LangChain1、基于LangChain调用ChatGPT2、使用LangChain调用百度文心一言3、使用LangChain调用讯飞星火4、使用LangChain调用智谱GLM具体内容与代码详见将LLM接入LangChain。二、构建检索问答链1、加载向量数据库2、创建一个LLM3、构建检索问答链4、检索问答链效果测试5、添加历史对话的记忆功能(1)记忆(Mem
- 为什么说千万别学网络安全专业?
小杰的网工专栏
web安全网络安全
前言很多人说千万别学网络安全专业的原因是因为网络安全专业学习的课程非常难。就业要求高。很多同学在大学开始接触网络空间安全专业时,才发现:对于自己来说,网络空间安全专业相关的课程学习难度有点高。为什么说千万别学网络安全专业的原因小编看来网络安全专业是很好的专业,前景很好。但是很多人说千万别学网络安全专业主要有以下原因:1、网络安全专业大多需要的是高端技术人才。国家需要的是专业水平在前1%技术大牛,简
- 2021-04-09
2018心如止水
张雲芳焦点解决网络课程学习坚持分享第725天20210409(约练总271)相信一切都是最好的安排!随缘!
- 玛雅五大图腾
飛妃1224
玛雅课程学习到第三课了,学会了计算五大图腾。在玛雅中,太阳图腾是对我们影响比较大的力量。五大图腾包括:主印记,指引,支持,推动,挑战主印记代表你的基础力量,核心特质。支持图腾:随时准备支持你的力量。对应时间:午夜到日出。指引图腾:给你灵感,指引你回归自己的力量。对应时间:日出到正午。挑战图腾:促使你成长的力量。对应时间:正午到日落。推动图腾:需要你去转化的隐藏阴影。对应时间:日落到午夜。
- 冀人教育,工作与学历并不冲突
爱咬人的小仙女
要不要专升本是很多人都在犹豫的一个问题,三年的专科生活过完意味着将要步入社会,专升本是不是在浪费时间?在别人积累工作经验的时候自己还在上学,年龄与经验成反比。但是提升学历进行深造是很多人的梦想。的确在失去本科层次院校录取资格后,专科生能够有机会升入本科甚至更高学历的院校学习,是许多专科生的梦想。统招专升本是指普通高等院校的专科学生结束专科阶段的课程学习之后,根据当年国家教育部和国家发展改革委(发改
- 繁忙不是自虐
墨宁墨
核聚老师的理论改变自己思维行为模式墨宁墨打卡序号:[第一阶段Day20]•课程学习,阅读核聚老师的文章•学习内容:如「掌握学习本质,快速找到学习捷径」•打卡正文:重塑思维,认知学习进步回顾核聚老师理论学习,改变自己原有认知行为模式,更有效的利用时间,更充分地发挥自己的作用。1.人生是一个事件序列有许多事件已经被设置好,有些事件你必须自己设置,启动它、触发它。无论是主动还是被动,你人生的多米诺骨牌始
- 存储课程学习笔记7_fuse库的简单使用(fuse,opencv的demo)
yun6853992
dpdk学习fuse
fuse一般称为用户态度文件系统,可以实现在用户层实现对文件系统的控制。通过fuse内核模块的支持,基于libfuse提供的接口,就可以实现一个文件系统。fuse内核模块实现了与VFS的对接,运行后可以看到/dev/fuse,拦截相关请求,反馈给fuse进程,进行操作。使用fuse进行开发,不用关注内核模块,直接使用libfuse库在用户态实现文件系统即可。0:总结1:fuse的开发,实际上和前面
- 生活小记录
紫岚兮
2021年8月12日,周四,多云有雨。灵艳早早的跟着二姨妈去摘小番茄,早饭后,王斌到庄上送楠楠外婆的身份证,良斌开车从楚雄回来,直接到我家来吃饭。那我基本就是在家里带娃了,3个孩子,玩的时候陪他们玩,下午点,楠楠坐在沙发上吸着奶瓶睡着了,王斌抱她到房间里面睡,我带着可可和弟弟在客厅看电视,我哄小宝睡觉,过了会儿,可可趴在沙发上睡着了,小家伙还没睡,自个儿玩玩这个,拿拿那个,这里翻翻,那里爬爬,我都
- apollo事件通信机制
XuSheng.Mrs
APOLLOApolloperceptionshareddata
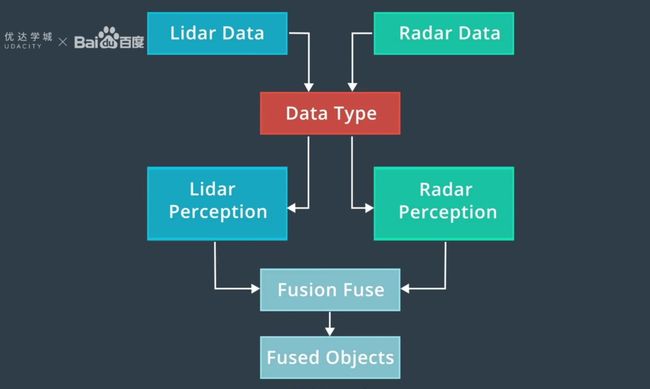
我目前用的是基于ros版本的apollo,在apollo内部有两种消息传输机制,一种是基于ros的回调函数的订阅来实现各个模块之间的数据通信,还有一种就是事件的通信机制,主要用于感知模块内部的通信,这种通信是基于进程间的内存共享来实现消息的传递.下面我主要介绍第二种消息传递的方式:先看一下事件的实际应用发布事件:voidAsyncFusionSubnode::PublishDataAndEvent
- 2021-06-08
2018心如止水
张雲芳焦点解决网络课程学习坚持分享第785天20210608本周第1次(约练总285)焦点解决短期心理治疗是一个入门易,精进难的学派,需要学习者多年的学习、练习、反思与坚持。学习焦点不能一步登天,更不能一蹴而就,她需要循序渐进的学习,才能慢慢形成焦点的思维模式。
- 存储课程学习笔记3_读写nvme磁盘(清除脏数据,struct nvme_user_io和ioctl进行读写,struct block_device内核提供接口读写)
yun6853992
dpdk学习nvme
上篇文章实现在内核模块下插入一个文件系统,实现对磁盘或者目录进行对应格式化(mount)绑定文件系统后,已经可以正常使用。接下来了解对nvme磁盘的控制。0:总结1:初始化nvme磁盘,清空脏数据dd指令2:structnvme_user_io结构体+ioctl实现直接控制nvme磁盘。了解block块3:借助内核接口插入内核模块实现对nvme磁盘的访问。(structblock_device对象
- 存储课程学习笔记1_访问scsi磁盘读写测试(struct sg_io_hdr,ioctl,mmap)
yun6853992
dpdk学习scsi
创建虚拟机时,可以选择SCSI,STAT,NVME不同类型的磁盘。0:总结===》了解内核提供的访问scsi的结构和方法(主要是sg_io_hdr_t结构体和ioctl函数)。===》需要读scsi协议文档,了解相关指令,只演示了16字节固定长度读和写指令。===》了解mmap,直接映射磁盘可以实现读写功能。1:简单了解概念。sata是串行接口,访问sata设备,除了使用控制指令(原语交互),就是
- 分数限制下,选好专业还是选好学校?
禁默
人工智能
1.专业解析探讨不同专业的优势和未来挑战(课程学习、就业等维度)。结合个人专业选择的经验和思考过程,自定义实际场景并给出不同场景下的“专业VS学校”选择方案。当探讨不同专业的优势和未来挑战时,需要根据具体的专业领域和市场需求进行评估。以下是一些常见专业领域的例子,以及它们可能面临的挑战和优势注意:专业分析只是分析了一部分,还有很多优秀的专业,大家可以上网查询,比小编介绍的更加详细!!!1.1工程类
- 自律打卡|20220317
潇子雯
今天目标完成进度如下:①:一年100张画——5/100②:日更200徽章——35/200③:育儿课程学习打卡——已完成④:锻炼15分钟——已完成⑤:亲子共读——已完成今日碎碎念:今天听育儿课程听到一个观点,就是孩子做作业不专心,有些父母会崩溃大吼,多发生在小学阶段的孩子身上,主要就是这个年龄段的孩子专注力本来就弱,就像刚学会走路的小娃娃,走几步就会摔倒,小娃娃走路摔倒了,我们会去扶起他,当他再一次
- 结束,开始
伊世界
今天早上正念冥想练习打卡,后就结束了“49”天的正念课程10.27—11.14)。这次心情格外平静,结束的是课程实验项目,老师们不用在坚持催促我们打卡填问卷调查。而我已经和正念不离不弃融为一体,它将以自然的姿态呈现在我的生活里,像空气一样无所不在,像呼吸一样理所当然。每天早上禅修共修也是正念的一种形式而已……这将是两年的课程陪伴已经于11月份开启,目前进入二阶课程学习。当时我正在正念课程的路上,它
- 樊登运营大学—第四天复盘
雨遥高效阅读
必修【今日行动】(1)听课(2)课程输出【课程学习收获】第七课许菡芸——用户思维的沟通能力1.什么是用户思维需要我们从“帮助学员变得更好”的角度出发,详细剖析学习、练习、成长的过程。把学员体验放在第一位,从学员体验的角度出发,这就是用户思维。2.用户思维的沟通可以用在社群运营中哪个部分?#用户思维用于运营活动注意事项:(1)一定要设定自己的运营目标,要清楚学员来训练营的目标;在设计活动上,应该多设
- <二> speed_bounds_decider(3)
不知道是谁2
自动驾驶apollo规划控制
st_boundary_mapper.cc/*******************************************************************************Copyright2017TheApolloAuthors.AllRightsReserved.**LicensedundertheApacheLicense,Version2.0(the"Lice
- 2021-11-29晚间日记
乐小米528
起床:6:30就寝:10:30天气:多云心情:小冲动叫我起床的不是闹钟是梦想年度目标及关键点:写作,健身,学习本月重要成果:007线上7课学习并完成作业打卡,课题制作课程学习并打造课程成功日志-记录三五件有收获的事务今天利用中午休息一小时完成了党建要求的总结材料,本来以为很难的一个东西,没想到写着写着就越写越顺,仅花了1.5小时就完成了3000多字的总结材料,还得感谢最近写得多了自然而然形成了一种
- 【绘分享『英文启蒙规划师』训练营】第一课作业
圆栗
图片发自AppQ:请观察您的孩子有没有在哪个特质上格外显著?比如特别喜欢唱歌跳舞?针对孩子的特点和英文学习进展,来说说您将如何为Ta选择下一步学习内容?A:我家女宝,今年5岁,特别喜欢唱歌跳舞和运动类项目,现在已经持续了半年多的听儿歌和简单英文绘本音频,最近增加高频词学习,主要以我讲为主,感觉输出比较弱,不喜欢说简单句子,只是蹦单词。通过此次课程学习我认为一、多采取游戏和有节奏的歌舞的方式提高兴趣
- Laravel小程序学习日记2018-07-10
Purson
有那么一个星期没有写日记了,因为答应了Sheldon15号前完成小程序的学习,很多东西都来不及总结,但是由于有vuejs的基础,wepy的使用是比较清楚的。今天为什么记录主要有1个原因,就是我在laravel小程序课程里面提交的修改被合并了,这次不是一两个错字那么简单,是一个小方法,这里截图庆祝一下。投稿小记录在wepy里面异步函数更新数据,一定要在后面加个this.$apply()
- 2022-05-24
2018心如止水
张雲芳焦点解决网络课程学习坚持分享第1135天20220524(约练总388)稳住,思考,清晰,智慧
- 《哪吒之魔童降世》观后感及林老师课程学习感悟
岩中花树2020
《哪吒之魔童降世》观后感——自己的路自己走去年和女儿一起看的这部影片。颠覆传统印象,顶着两个黑眼圈、玩世不恭的哪吒,还有一口川音的圆圆滚滚的太乙真人,6岁的女儿看的津津有味。对于我来说,影片观罢,回荡在脑海的就是哪吒喊出的“我命由我不由天”!现在再次温习影片,更感这部影片可以看作是关于成长、觉知的影片,更感这是一部关于家庭和父母教育的影片。哪吒还是敖丙,灵珠还是魔丸,是屈服于先天的被定义、后天的被
- 【生活小记录】孩子在家一天就是忙碌的一天!(2022173)
恋上清咖
因为小中考的原因,女儿的休息时间从这周六调整到周日了,这个休息安排非常好,可以让我好好的陪陪爸爸妈妈,只不过要在父亲节这天不能好好陪父亲过个节了!唉!没办法呀!也不知道为什么孩子总不喜欢住在外边,即使是从小最疼爱她的姥姥家也不行,就觉得自己家里好!孩子休息的时间本来就短还是尊重一下孩子的选择,只好在陪爸爸妈妈还是陪女儿之间忍痛选择一下了!希望爸爸妈妈理解!这女儿一休息,我就像一个小陀螺似的忙起来了
- Enum 枚举
120153216
enum枚举
原文地址:http://www.cnblogs.com/Kavlez/p/4268601.html Enumeration
于Java 1.5增加的enum type...enum type是由一组固定的常量组成的类型,比如四个季节、扑克花色。在出现enum type之前,通常用一组int常量表示枚举类型。比如这样:
public static final int APPLE_FUJI = 0
- Java8简明教程
bijian1013
javajdk1.8
Java 8已于2014年3月18日正式发布了,新版本带来了诸多改进,包括Lambda表达式、Streams、日期时间API等等。本文就带你领略Java 8的全新特性。
一.允许在接口中有默认方法实现
Java 8 允许我们使用default关键字,为接口声明添
- Oracle表维护 快速备份删除数据
cuisuqiang
oracle索引快速备份删除
我知道oracle表分区,不过那是数据库设计阶段的事情,目前是远水解不了近渴。
当前的数据库表,要求保留一个月数据,且表存在大量录入更新,不存在程序删除。
为了解决频繁查询和更新的瓶颈,我在oracle内根据需要创建了索引。但是随着数据量的增加,一个半月数据就要超千万,此时就算有索引,对高并发的查询和更新来说,让然有所拖累。
为了解决这个问题,我一般一个月会进行一次数据库维护,主要工作就是备
- java多态内存分析
麦田的设计者
java内存分析多态原理接口和抽象类
“ 时针如果可以回头,熟悉那张脸,重温嬉戏这乐园,墙壁的松脱涂鸦已经褪色才明白存在的价值归于记忆。街角小店尚存在吗?这大时代会不会牵挂,过去现在花开怎么会等待。
但有种意外不管痛不痛都有伤害,光阴远远离开,那笑声徘徊与脑海。但这一秒可笑不再可爱,当天心
- Xshell实现Windows上传文件到Linux主机
被触发
windows
经常有这样的需求,我们在Windows下载的软件包,如何上传到远程Linux主机上?还有如何从Linux主机下载软件包到Windows下;之前我的做法现在看来好笨好繁琐,不过也达到了目的,笨人有本方法嘛;
我是怎么操作的:
1、打开一台本地Linux虚拟机,使用mount 挂载Windows的共享文件夹到Linux上,然后拷贝数据到Linux虚拟机里面;(经常第一步都不顺利,无法挂载Windo
- 类的加载ClassLoader
肆无忌惮_
ClassLoader
类加载器ClassLoader是用来将java的类加载到虚拟机中,类加载器负责读取class字节文件到内存中,并将它转为Class的对象(类对象),通过此实例的 newInstance()方法就可以创建出该类的一个对象。
其中重要的方法为findClass(String name)。
如何写一个自己的类加载器呢?
首先写一个便于测试的类Student
- html5写的玫瑰花
知了ing
html5
<html>
<head>
<title>I Love You!</title>
<meta charset="utf-8" />
</head>
<body>
<canvas id="c"></canvas>
- google的ConcurrentLinkedHashmap源代码解析
矮蛋蛋
LRU
原文地址:
http://janeky.iteye.com/blog/1534352
简述
ConcurrentLinkedHashMap 是google团队提供的一个容器。它有什么用呢?其实它本身是对
ConcurrentHashMap的封装,可以用来实现一个基于LRU策略的缓存。详细介绍可以参见
http://code.google.com/p/concurrentlinke
- webservice获取访问服务的ip地址
alleni123
webservice
1. 首先注入javax.xml.ws.WebServiceContext,
@Resource
private WebServiceContext context;
2. 在方法中获取交换请求的对象。
javax.xml.ws.handler.MessageContext mc=context.getMessageContext();
com.sun.net.http
- 菜鸟的java基础提升之道——————>是否值得拥有
百合不是茶
1,c++,java是面向对象编程的语言,将万事万物都看成是对象;java做一件事情关注的是人物,java是c++继承过来的,java没有直接更改地址的权限但是可以通过引用来传值操作地址,java也没有c++中繁琐的操作,java以其优越的可移植型,平台的安全型,高效性赢得了广泛的认同,全世界越来越多的人去学习java,我也是其中的一员
java组成:
- 通过修改Linux服务自动启动指定应用程序
bijian1013
linux
Linux中修改系统服务的命令是chkconfig (check config),命令的详细解释如下: chkconfig
功能说明:检查,设置系统的各种服务。
语 法:chkconfig [ -- add][ -- del][ -- list][系统服务] 或 chkconfig [ -- level <</SPAN>
- spring拦截器的一个简单实例
bijian1013
javaspring拦截器Interceptor
Purview接口
package aop;
public interface Purview {
void checkLogin();
}
Purview接口的实现类PurviesImpl.java
package aop;
public class PurviewImpl implements Purview {
public void check
- [Velocity二]自定义Velocity指令
bit1129
velocity
什么是Velocity指令
在Velocity中,#set,#if, #foreach, #elseif, #parse等,以#开头的称之为指令,Velocity内置的这些指令可以用来做赋值,条件判断,循环控制等脚本语言必备的逻辑控制等语句,Velocity的指令是可扩展的,即用户可以根据实际的需要自定义Velocity指令
自定义指令(Directive)的一般步骤
&nbs
- 【Hive十】Programming Hive学习笔记
bit1129
programming
第二章 Getting Started
1.Hive最大的局限性是什么?一是不支持行级别的增删改(insert, delete, update)二是查询性能非常差(基于Hadoop MapReduce),不适合延迟小的交互式任务三是不支持事务2. Hive MetaStore是干什么的?Hive persists table schemas and other system metadata.
- nginx有选择性进行限制
ronin47
nginx 动静 限制
http {
limit_conn_zone $binary_remote_addr zone=addr:10m;
limit_req_zone $binary_remote_addr zone=one:10m rate=5r/s;...
server {...
location ~.*\.(gif|png|css|js|icon)$ {
- java-4.-在二元树中找出和为某一值的所有路径 .
bylijinnan
java
/*
* 0.use a TwoWayLinkedList to store the path.when the node can't be path,you should/can delete it.
* 1.curSum==exceptedSum:if the lastNode is TreeNode,printPath();delete the node otherwise
- Netty学习笔记
bylijinnan
javanetty
本文是阅读以下两篇文章时:
http://seeallhearall.blogspot.com/2012/05/netty-tutorial-part-1-introduction-to.html
http://seeallhearall.blogspot.com/2012/06/netty-tutorial-part-15-on-channel.html
我的一些笔记
===
- js获取项目路径
cngolon
js
//js获取项目根路径,如: http://localhost:8083/uimcardprj
function getRootPath(){
//获取当前网址,如: http://localhost:8083/uimcardprj/share/meun.jsp
var curWwwPath=window.document.locati
- oracle 的性能优化
cuishikuan
oracleSQL Server
在网上搜索了一些Oracle性能优化的文章,为了更加深层次的巩固[边写边记],也为了可以随时查看,所以发表这篇文章。
1.ORACLE采用自下而上的顺序解析WHERE子句,根据这个原理,表之间的连接必须写在其他WHERE条件之前,那些可以过滤掉最大数量记录的条件必须写在WHERE子句的末尾。(这点本人曾经做过实例验证过,的确如此哦!
- Shell变量和数组使用详解
daizj
linuxshell变量数组
Shell 变量
定义变量时,变量名不加美元符号($,PHP语言中变量需要),如:
your_name="w3cschool.cc"
注意,变量名和等号之间不能有空格,这可能和你熟悉的所有编程语言都不一样。同时,变量名的命名须遵循如下规则:
首个字符必须为字母(a-z,A-Z)。
中间不能有空格,可以使用下划线(_)。
不能使用标点符号。
不能使用ba
- 编程中的一些概念,KISS、DRY、MVC、OOP、REST
dcj3sjt126com
REST
KISS、DRY、MVC、OOP、REST (1)KISS是指Keep It Simple,Stupid(摘自wikipedia),指设计时要坚持简约原则,避免不必要的复杂化。 (2)DRY是指Don't Repeat Yourself(摘自wikipedia),特指在程序设计以及计算中避免重复代码,因为这样会降低灵活性、简洁性,并且可能导致代码之间的矛盾。 (3)OOP 即Object-Orie
- [Android]设置Activity为全屏显示的两种方法
dcj3sjt126com
Activity
1. 方法1:AndroidManifest.xml 里,Activity的 android:theme 指定为" @android:style/Theme.NoTitleBar.Fullscreen" 示例: <application
- solrcloud 部署方式比较
eksliang
solrCloud
solrcloud 的部署其实有两种方式可选,那么我们在实践开发中应该怎样选择呢? 第一种:当启动solr服务器时,内嵌的启动一个Zookeeper服务器,然后将这些内嵌的Zookeeper服务器组成一个集群。 第二种:将Zookeeper服务器独立的配置一个集群,然后将solr交给Zookeeper进行管理
谈谈第一种:每启动一个solr服务器就内嵌的启动一个Zoo
- Java synchronized关键字详解
gqdy365
synchronized
转载自:http://www.cnblogs.com/mengdd/archive/2013/02/16/2913806.html
多线程的同步机制对资源进行加锁,使得在同一个时间,只有一个线程可以进行操作,同步用以解决多个线程同时访问时可能出现的问题。
同步机制可以使用synchronized关键字实现。
当synchronized关键字修饰一个方法的时候,该方法叫做同步方法。
当s
- js实现登录时记住用户名
hw1287789687
记住我记住密码cookie记住用户名记住账号
在页面中如何获取cookie值呢?
如果是JSP的话,可以通过servlet的对象request 获取cookie,可以
参考:http://hw1287789687.iteye.com/blog/2050040
如果要求登录页面是html呢?html页面中如何获取cookie呢?
直接上代码了
页面:loginInput.html
代码:
<!DOCTYPE html PUB
- 开发者必备的 Chrome 扩展
justjavac
chrome
Firebug:不用多介绍了吧https://chrome.google.com/webstore/detail/bmagokdooijbeehmkpknfglimnifench
ChromeSnifferPlus:Chrome 探测器,可以探测正在使用的开源软件或者 js 类库https://chrome.google.com/webstore/detail/chrome-sniffer-pl
- 算法机试题
李亚飞
java算法机试题
在面试机试时,遇到一个算法题,当时没能写出来,最后是同学帮忙解决的。
这道题大致意思是:输入一个数,比如4,。这时会输出:
&n
- 正确配置Linux系统ulimit值
字符串
ulimit
在Linux下面部 署应用的时候,有时候会遇上Socket/File: Can’t open so many files的问题;这个值也会影响服务器的最大并发数,其实Linux是有文件句柄限制的,而且Linux默认不是很高,一般都是1024,生产服务器用 其实很容易就达到这个数量。下面说的是,如何通过正解配置来改正这个系统默认值。因为这个问题是我配置Nginx+php5时遇到了,所以我将这篇归纳进
- hibernate调用返回游标的存储过程
Supanccy2013
javaDAOoracleHibernatejdbc
注:原创作品,转载请注明出处。
上篇博文介绍的是hibernate调用返回单值的存储过程,本片博文说的是hibernate调用返回游标的存储过程。
此此扁博文的存储过程的功能相当于是jdbc调用select 的作用。
1,创建oracle中的包,并在该包中创建的游标类型。
---创建oracle的程
- Spring 4.2新特性-更简单的Application Event
wiselyman
application
1.1 Application Event
Spring 4.1的写法请参考10点睛Spring4.1-Application Event
请对比10点睛Spring4.1-Application Event
使用一个@EventListener取代了实现ApplicationListener接口,使耦合度降低;
1.2 示例
包依赖
<p