Dijkstra算法及其堆优化代码详解
迪杰斯特拉算法解决的是带权重的有向图上单源最短路径问题,该算法要求所有边的权重都为非负值,其在运行过程中维持的关键信息是一组节点集合S。算法重复从结点集V-S中选择最短路径估计最小的结点u,将u加入到集合S,然后对所有从u发生的边进行松弛,运行结束后,从源节点到集合S中每个结点之间的最短路径已经被找到。
下面,通过一个实例讲解该过程!
1 实例讲解
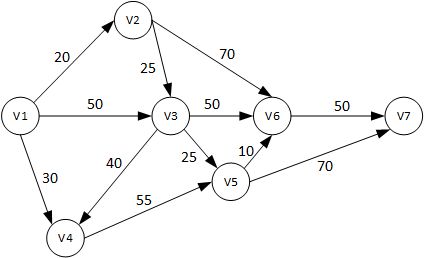
如图,是一个有向无环图,假定出发点为V1,迪杰斯特拉算法将算出V1到其他所有点的最短路径,则所求V1到终点的最短路径也可得到,该算法主要完成以下几步:
- 找到V1
- 得到以V1出发的邻接点的最短距离,将V1加到S集合中(代码中通过vis数组标记)
- 从S集合之外的点中找到距离最短者,对以其为出发点的邻接点进行松弛操作,若距离被更新,则记录前驱
- 重复3,直到所有点被S集合收录
- 完成后,将得到V1到所有点的最短距离,同时,通过每一个点记录的前驱得到最短路径
1.1 问题:
- 松弛操作是啥?
松弛操作意味着比起原来的路径,找到了一条距离更短的路,则将原来点的距离更新为新的距离。注意本文中某个点的距离全部指的是从出发点即V1到该点的距离。代码如下:
if(dis[j]>dis[k]+map[k][j])
{
dis[j]=dis[k]+map[k][j];
path[j]=k;
}
- 为啥每个点记录前驱能用于V1到所有终点?
我的理解是最短路是由最短路+某一条固定路组成,所以前驱适用全部点,比如该图中V1到V7的最短路径为V1->V2->V3->V5->V6->V7,因为V6->V7的距离固定为50,所以V7的最短路径中V1->V6的一段必然是V1->V6的最短路径,因此每个结点只需记录一个前驱。要想打印出路径,从终点开始一次次找前驱即可,可通过递归实现。代码如下:
void print(int x)//x为终点
{
if(x == -1) return;
//递归
print(path[x]);
printf("%d->",x);
}
1.2 算法过程
程序运行过程中,数据的更新情况如图所示:
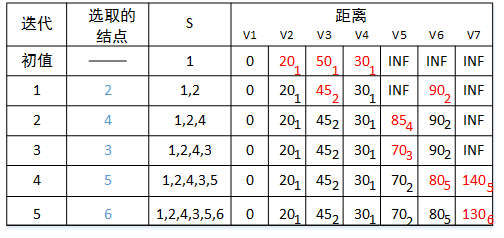
画这个破图累死了,红色数据代表每次迭代中被更新的数据,下标代表了结点前驱。由上图可得,当所有结点加入S后,就得到了V1到所有结点的最短距离和最短路径,例如V1到V7的最短距离为130,V7的前驱为V6,V6的前驱为V5,V5的前驱为V3,V3的前驱为V2,V2的前驱为V1,则V1到V7的最短路径为V1->V2->V3->V5->V6->V7。
2 代码详解
以下为上述实例的完整代码,代码中详细注释了该算法中关键操作以及容易被误解的地方。
#include <iostream>
#include <cstring>
#include <cstdio>
/*问题描述:
* 输入n和m,代表n个节点,m条边,然后是m行输入,每行有x,y,z,代表x到y的路距离为z。
* 问题:从1出发到各点的最短路径。
* 测试样例:
7 12
1 2 20
1 3 50
1 4 30
2 3 25
2 6 70
3 4 40
3 6 50
3 5 25
4 5 55
5 6 10
5 7 70
6 7 50
*/
using namespace std;
const int maxn = 100;
int map[maxn][maxn];
int dis[maxn];
int path[maxn];
int vis[maxn];//记录更新过的点
int n;
void dijk(int s)
{
//初始化
memset(path,-1,sizeof(path));
/*INF使用0x3f3f3f3f的好处:
* 1:满足无穷大加一个有穷的数依然是无穷大(在DijKstra算法松弛操作中避免了溢出而出现负数)
* 2:满足无穷大加无穷大依然是无穷大(两个0x3f3f3f3f相加并未溢出)
* 3:初始化时,由于每一个字节为0x3f,所以只需要memset(buf,0x3f,sizeof(buf))即可
*/
memset(dis,0x3f,sizeof(dis)); //初始化为无穷大
memset(vis,0,sizeof(vis));
dis[s] = 0; //自身到自身的距离为0
while(1)
{
int k = 0;
for(int j = 1; j <= n; j++)
{
if(!vis[j]&&dis[j]<dis[k])//找未收录顶点中dis值最小的
k=j; //这里第一次找到的是起点
}
if(!k) return; //没有未收录的点,则返回
vis[k] = 1;
//松弛操作
for(int j = 1; j <= n; j++)
{
//第一次循环只有起点的邻接点距离被更新,每次都更新新找到的点的邻接点
if(dis[j]>dis[k]+map[k][j])
{
dis[j]=dis[k]+map[k][j];
path[j]=k;//路径被改变,重新记录前驱,最短路是由最短路+某一条固定路组成,所以前驱是有效的
}
}
}
}
void print(int x)//x为终点
{
if(x == -1) return;
//递归
print(path[x]);
printf("%d->",x);
}
int main()
{
int m,x,y,z,order;
scanf("%d%d",&n,&m);
memset(map,0x3f,sizeof(map));
for(int i = 0; i < m; i++)
{
scanf("%d%d%d",&x,&y,&z);
map[x][y] = z;
}
dijk(1);
scanf("%d",&order);//order为终点
print(path[order]);
printf("%d\n",order);
//打印最短距离
printf("%d\n",dis[order]);
return 0;
}
代码之所以能这么写,是因为初始化的时候置不连通的点之间的距离为INF,在寻找最短路径估计最小的结点u以及在是否松弛的判断中这点至关重要,请读者细细体会。
补充:基于堆优化的dijkstra算法代码 可以把时间复杂度从O(v^2)降到O(elogv)。
#include