Raspberry Pi+Python+ GPIO
Installation
The newest version of Raspbian has the RPi.GPIO library pre-installed. You’ll probably need to update your library, so using the command line, run:
sudo python
import RPi.GPIO as GPIO
GPIO.VERSIONThe current version of RPi.GPIO is 0.6.3 If you need to update to a newer version, run:
sudo apt-get update
sudo apt-get upgradeIf you don’t have the RPi.GPIO library because you’re using an older version of Raspbian, there are great instructions on the zhener website on installing the package from scratch.
Raspberry pi Pins

To add the GPIO library to a Python sketch, you must first import it:
import RPi.GPIO as GPIOThen we need to declare the type of numbering system we’re going to use for our pins:
#set up GPIO using BCM numbering
GPIO.setmode(GPIO.BCM)
#setup GPIO using Board numbering
GPIO.setmode(GPIO.BOARD)The main difference between these modes is that the BOARD option uses the pins exactly as they are laid out on the Pi. No matter what revision you’re using, these will always be the same. The BCM option uses the Broadcom SoC numbering, which differs between version 1 and version 2 of the Pi.
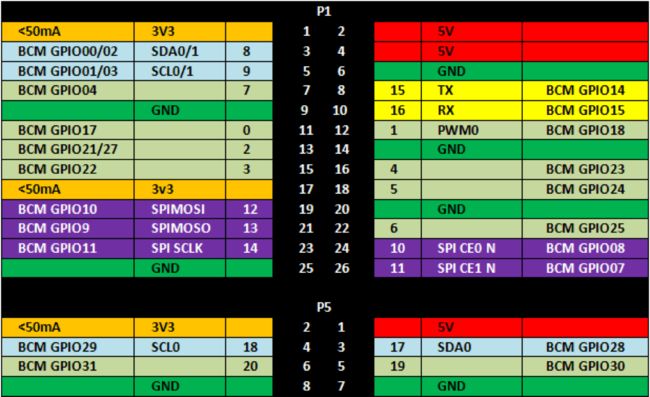
In the image above, you’ll see that Pin 5 is GPIO01/03. This means that a v.1 Pi is GPIO 01, while a v.2 Pi is GPIO 03. The BCM numbering is what I’ll be using for the rest of this entry, because it’s universal across other programming languages.
Starting programming
GPIO pins 23 and 24 (pins 16 and 18 on the board).To set up these pins, write:
GPIO.setmode(GPIO.BCM)
GPIO.setup(23, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
GPIO.setup(24, GPIO.IN, pull_up_down=GPIO.PUD_UP)set output mode:
GPIO.setup(channel, GPIO.OUT)
GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH)
GPIO.output(channel, state)Raspberry Pi has internal pull-up and pull-down resistors that can be specified when the pin declarations are made.
This will enable a pull-down resistor on pin 23, and a pull-up resistor on pin 24. Now, let’s check to see if we can read them. This will enable a pull-down resistor on pin 23, and a pull-up resistor on pin 24. Now, let’s check to see if we can read them.
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(23, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
GPIO.setup(24, GPIO.IN, pull_up_down = GPIO.PUD_UP)
while True:
if(GPIO.input(23) ==1):
print(“Button 1 pressed”)
if(GPIO.input(24) == 0):
print(“Button 2 pressed”)
GPIO.cleanup()The indents in Python are important when using loops, so be sure to include them. You also must run your script as “sudo” to access the GPIO pins. The GPIO.cleanup() command at the end is necessary to reset the status of any GPIO pins when you exit the program. If you don’t use this, then the GPIO pins will remain at whatever state they were last set to.
The GPIO library has built in a rising-edge and falling-edge function. A rising-edge is defined by the time the pin changes from low to high, but it only detects the change. Similarly, the falling-edge is the moment the pin changes from high to low.
GPIO.wait_for_edge(23, GPIO.RISING)
GPIO.wait_for_edge(23, GPIO.FALLING)Events and Callback Functions
Let’s say you’ve got the Raspberry Pi camera module, and you’d like it to snap a photo when you press a button. However, you don’t want your code to poll that button constantly, and you certainly don’t want to wait for an edge because you may have other code running simultaneously.
The best way to execute this code is using a callback function. This is a function that is attached to a specific GPIO pin and run whenever that edge is detected. Let’s try one:
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(23, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
GPIO.setup(24, GPIO.IN, pull_up_down = GPIO.PUD_UP)
def printFunction(channel):
print(“Button 1 pressed!”)
print(“Note how the bouncetime affects the button press”)
GPIO.add_event_detect(23, GPIO.RISING, callback=printFunction, bouncetime=300)
while True:
GPIO.wait_for_edge(24, GPIO.FALLING)
print(“Button 2 Pressed”)
GPIO.wait_for_edge(24, GPIO.RISING)
print(“Button 2 Released”)
GPIO.cleanup()You’ll notice here that button 1 will consistently trigger the printFunction, even while the main loop is waiting for an edge on button 2. This is because the callback function is in a separate thread. Threads are important in programming because they allow things to happen simultaneously without affecting other functions. Pressing button 1 will not affect what happens in our main loop.
Events are also great, because you can remove them from a pin just as easily as you can add them:
GPIO.remove_event_detect(23)Now you’re free to add a different function to the same pin!
Adding Functionality
As convenient as callback functions are for the GPIO pins, it still doesn’t change the fact that the Raspberry Pi is just not ideal for analog inputs or PWM outputs. However, because the Pi has Tx and Rx pins (pins 8 and 10, GPIO 14 and 15), it can easily communicate with an Arduino. If I have a project that requires an analog sensor input, or smooth PWM output, simply writing commands to the serial port to the Arduino can make things seamless.