opencv中的标准霍夫线变换(HoughLines)和统计霍夫变换(HoughLinesP)
本文主要讲解标准霍夫线变换(HoughLines)和统计霍夫变换(HoughLinesP)函数,并对函数在调用中的一些细节进行些讲解。
针对标准霍夫线变换(HoughLines)和统计霍夫变换(HoughLinesP)的一些细节和原理可以参考:
http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/imgtrans/hough_lines/hough_lines.html#hough-lines
一、下面首先对HoughLines函数进行讲解:
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0, double min_theta=0, double max_theta=CV_PI )
Parameters:
1、image – 8-bit, single-channel binary source image. The image may be modified by the function.
输入的图像应该是8为单通道二值图像
2、lines—Output vector of lines. Each line is represented by a two-element vector (\rho, \theta) . \rho is the distance from the coordinate origin (0,0) (top-left corner of the image). \theta is the line rotation angle in radians ( 0 \sim \textrm{vertical line}, \pi/2 \sim \textrm{horizontal line} ).
输出的直线,lines代表的是一个容器,包含(\rho, \theta)的容器
3、rho – Distance resolution of the accumulator in pixels.
极径参数的距离分辨率
4、theta – Angle resolution of the accumulator in radians.
极角参数的角度分辨率
5、threshold – Accumulator threshold parameter. Only those lines are returned that get enough votes (>\texttt{threshold} ).
设定的阈值,大于此阈值的交点,才会被认为是一条直线
之后几个参数可以用默认值
6、srn – For the multi-scale Hough transform, it is a divisor for the distance resolution rho . The coarse accumulator distance resolution is rho and the accurate accumulator resolution is rho/srn . If bothsrn=0 and stn=0 , the classical Hough transform is used. Otherwise, both these parameters should be positive.
7、stn – For the multi-scale Hough transform, it is a divisor for the distance resolution theta.
min_theta – For standard and multi-scale Hough transform, minimum angle to check for lines. Must fall between 0 and max_theta./
8、max_theta – For standard and multi-scale Hough transform, maximum angle to check for lines. Must fall between min_theta and CV_PI.
之后几个参数可以用默认值
二、下面首先对HoughLinesP函数进行讲解:
void HoughLinesP(InputArray image, OutputArray lines, double rho, double theta, int threshold, doubleminLineLength=0, double maxLineGap=0 )
Parameters:
1、image – 8-bit, single-channel binary source image. The image may be modified by the function.
输入的图像应该是8为单通道二值图像
2、lines – Output vector of lines. Each line is represented by a 4-element vector (x_1, y_1, x_2, y_2) , where(x_1,y_1) and (x_2, y_2) are the ending points of each detected line segment.
rho – Distance resolution of the accumulator in pixels.
输出的矢量。输出的两点是线段的两个端点
3、rho – Distance resolution of the accumulator in pixels.
极径参数的距离分辨率
4、theta – Angle resolution of the accumulator in radians.
极角参数的角度分辨率
5、threshold – Accumulator threshold parameter. Only those lines are returned that get enough votes (>\texttt{threshold} ).
设定的阈值,大于此阈值的交点,才会被认为是一条直线
6、minLineLength – Minimum line length. Line segments shorter than that are rejected.
线段的最小长度
7、maxLineGap – Maximum allowed gap between points on the same line to link them.
点到直线被允许的最大距离
三、对代码进行讲解
if 0
vector lines;
HoughLines(dst, lines, 1, CV_PI/180, 100, 0, 0 );
for( size_t i = 0; i < lines.size(); i++ )
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000*(-b));
pt1.y = cvRound(y0 + 1000*(a));
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*(a));
line( cdst, pt1, pt2, Scalar(0,0,255), 3, CV_AA);
}
#else
vector lines;
HoughLinesP(dst, lines, 1, CV_PI/180, 50, 50, 10 );
for( size_t i = 0; i < lines.size(); i++ )
{
Vec4i l = lines[i];
line( cdst, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0,0,255), 3, CV_AA);
}
#endif
imshow(“source”, src);
imshow(“detected lines”, cdst);
waitKey();
return 0;
}
1、c++中 Vector 是一个类模板。不是一种数据类型。 Vector是一种数据类型。
2、 typedef vec Vec2b;
typedef vec Vec3b;
typedef vec Vec4b;
typedef vec Vec2s;
typedef vec Vec3s;
typedef vec Vec4s;
typedef vec Vec2i;
typedef vec Vec3i;
typedef vec Vec4i;
typedef vec Vec2f;
typedef vec Vec3f;
typedef vec Vec4f;
typedef vec Vec6f;
typedef vec Vec2d;
typedef vec Vec3d;
typedef vec Vec4d;
typedef vec Vec6d; 3、函数讲解:
float rho = lines[i][0], theta = lines[i][1]; //返回极径和极角
Point pt1, pt2;
double a = cos(theta), b = sin(theta); //确定cos和sin的值
double x0 = a*rho, y0 = b*rho; //确定X0和Y0点
pt1.x = cvRound(x0 + 1000*(-b));
pt1.y = cvRound(y0 + 1000*(a));
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*(a));
line( cdst, pt1, pt2, Scalar(0,0,255), 3, CV_AA); 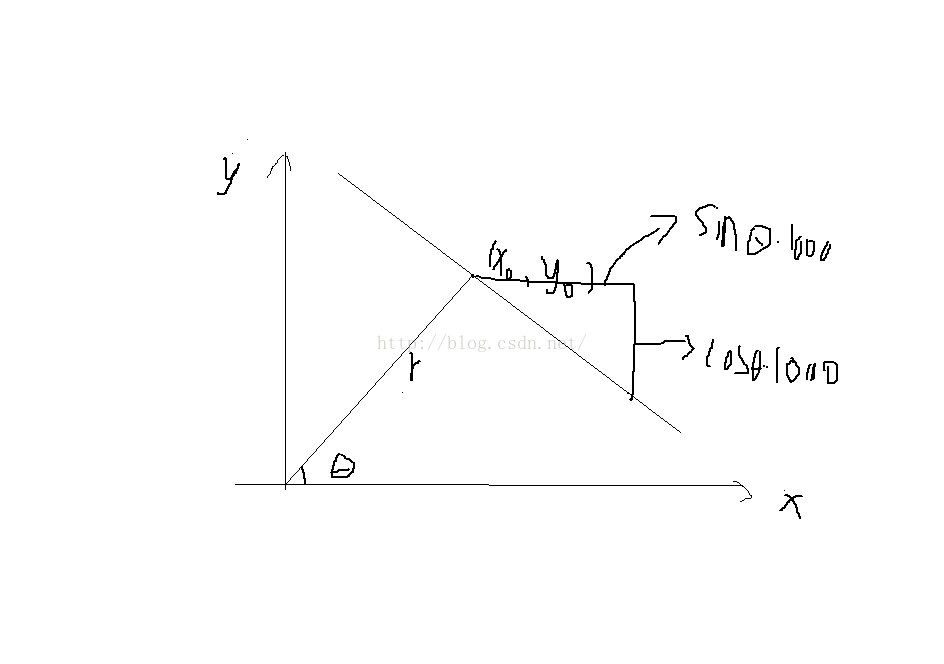
通过X0和Y0向上向下个找两点,确定一条直线。1000只是个数,也可以用其他的数。
4、cvRound
int cvRound (double value) //把浮点数转化成整数