Pytorch
一、动态库链接文件找不到
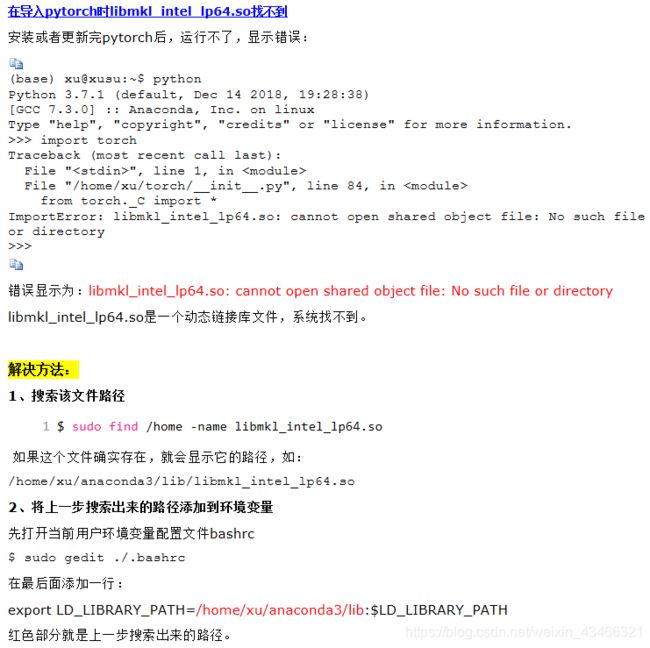

二、Pytorch的Dataloader报错

三、pytorch bug


四、常用函数功能使用
1.view
view(a,b)中第一个参数a代表目标张量的行数,b代表列数,为了简便起见,也可以只指定第一个参数a,b这个参数设置成-1,函数会自动计算对应的列数。
import torch
number_1 = torch.randn(2,3)
print(number_1.view(3,-1))
tensor([[1.0506, -0.5875],
[-1.2477, 0.0635],
[0.8997, 0.1551]])
2.squeeze
其功能是进行维度缩减(维度为1的删除)。Squeeze(a,b)中第一个参数a代表传入的张量,b代表要缩减的维数。如果第二个参数没有指定,则默认删除所有维度为1的维度。
number_2 = torch.randn(2, 1)
print(number_2)
3.torch.sum(input, dim, keepdim=False, out=None) → Tensor
返回新的张量,其中包括输入张量input中指定维度dim中每行的和。
若keepdim值为True,则在输出张量中,除了被操作的dim维度值降为1,其它维度与输入张量input相同。否则,dim维度相当于被执行torch.squeeze()维度压缩操作,导致此维度消失,最终输出张量会比输入张量少一个维度。
参数:
例子:
a = torch.rand(4, 4)
a
0.6117 0.2066 0.1838 0.5582
0.7751 0.5258 0.8898 0.4822
0.8238 0.4217 0.2266 0.2178
0.2121 0.6614 0.4635 0.0368
[torch.FloatTensor of size 4x4]
torch.sum(a, 1, True)
1.5602
2.6728
1.6900
1.3737
[torch.FloatTensor of size 4x1]
4.torch.prod(input, dim, keepdim=False, out=None) → Tensor
返回新的张量,其中包括输入张量input中指定维度dim中每行的乘积。
若keepdim值为True,则在输出张量中,除了被操作的dim维度值降为1,其它维度与输入张量input相同。否则,dim维度相当于被执行torch.squeeze()维度压缩操作,导致此维度消失,最终输出张量会比输入张量少一个维度。
参数:
例子:
a = torch.randn(4, 2)
a
-1.8626 -0.5725
-0.6924 -0.8738
-0.2659 0.3540
-0.4500 1.4647
[torch.FloatTensor of size 4x2]
torch.prod(a, 1, True)
1.0664
0.6050
-0.0941
-0.6592
[torch.FloatTensor of size 4x1]
5.线性插值
torch.lerp(star,end,weight) → Tensor
基于weight对输入的两个张量start与end逐个元素计算线性插值,结果返回至输出张量。
返回结果是:
参数:
例子:
start = torch.arange(1, 5)
end = torch.Tensor(4).fill_(10)
start
1
2
3
4
[torch.FloatTensor of size 4]
end
10
10
10
10
[torch.FloatTensor of size 4]
torch.lerp(start, end, 0.5)
5.5000
6.0000
6.5000
7.0000
[torch.FloatTensor of size 4]
来自
6.pytorch:torch.clamp()
2018年09月11日 16:02:43 大雄没有叮当猫 阅读数 7215
版权声明:微信公众号:数据挖掘与机器学习进阶之路。本文为博主原创文章,未经博主允许不得转载。 https://blog.csdn.net/u013230189/article/details/82627375
torch.clamp(input, min, max, out=None) → Tensor
将输入input张量每个元素的夹紧到区间 [min,max][min,max],并返回结果到一个新张量。
操作定义如下:
- | min, if x_i < min
- y_i = | x_i, if min <= x_i <= max
- | max, if x_i > max
如果输入是FloatTensor or DoubleTensor类型,则参数min max 必须为实数,否则须为整数。【译注:似乎并非如此,无关输入类型,min, max取整数、实数皆可。】
参数:
- input (Tensor) – 输入张量
- min (Number) – 限制范围下限
- max (Number) – 限制范围上限
- out (Tensor, optional) – 输出张量
代码示例如下:
- a=torch.randint(low=0,high=10,size=(10,1))
- print(a)
- a=torch.clamp(a,3,9)
- print(a)
输出如下
- tensor([[9.],
- [3.],
- [0.],
- [4.],
- [4.],
- [2.],
- [4.],
- [1.],
- [2.],
- [9.]])
- tensor([[9.],
- [3.],
- [3.],
- [4.],
- [4.],
- [3.],
- [4.],
- [3.],
- [3.],
- [9.]])
来自
来自
五、损失
| class MarginRankingLoss(_Loss): |
|
|
|
r"""Creates a criterion that measures the loss given |
|
|
inputs :math:`x1`, :math:`x2`, two 1D mini-batch `Tensors`, |
|
|
and a label 1D mini-batch tensor :math:`y` (containing 1 or -1). |
|
|
If :math:`y = 1` then it assumed the first input should be ranked higher |
|
|
(have a larger value) than the second input, and vice-versa for :math:`y = -1`. |
|
|
The loss function for each sample in the mini-batch is: |
|
|
.. math:: |
|
|
\text{loss}(x, y) = \max(0, -y * (x1 - x2) + \text{margin}) |
|
|
Args: |
|
|
margin (float, optional): Has a default value of :math:`0`. |
|
|
size_average (bool, optional): Deprecated (see :attr:`reduction`). By default, |
|
|
the losses are averaged over each loss element in the batch. Note that for |
|
|
some losses, there are multiple elements per sample. If the field :attr:`size_average` |
|
|
is set to ``False``, the losses are instead summed for each minibatch. Ignored |
|
|
when reduce is ``False``. Default: ``True`` |
|
|
reduce (bool, optional): Deprecated (see :attr:`reduction`). By default, the |
|
|
losses are averaged or summed over observations for each minibatch depending |
|
|
on :attr:`size_average`. When :attr:`reduce` is ``False``, returns a loss per |
|
|
batch element instead and ignores :attr:`size_average`. Default: ``True`` |
|
|
reduction (string, optional): Specifies the reduction to apply to the output: |
|
|
``'none'`` | ``'mean'`` | ``'sum'``. ``'none'``: no reduction will be applied, |
|
|
``'mean'``: the sum of the output will be divided by the number of |
|
|
elements in the output, ``'sum'``: the output will be summed. Note: :attr:`size_average` |
|
|
and :attr:`reduce` are in the process of being deprecated, and in the meantime, |
|
|
specifying either of those two args will override :attr:`reduction`. Default: ``'mean'`` |
|
|
Shape: |
|
|
- Input: :math:`(N, D)` where `N` is the batch size and `D` is the size of a sample. |
|
|
- Target: :math:`(N)` |
|
|
- Output: scalar. If :attr:`reduction` is ``'none'``, then :math:`(N)`. |
|
|
""" |
|
|
__constants__ = ['margin', 'reduction'] |
|
|
def __init__(self, margin=0., size_average=None, reduce=None, reduction='mean'): |
|
|
super(MarginRankingLoss, self).__init__(size_average, reduce, reduction) |
|
|
self.margin = margin |
|
|
def forward(self, input1, input2, target): |
|
|
return F.margin_ranking_loss(input1, input2, target, margin=self.margin, reduction=self.reduction) |
| class CrossEntropyLoss(_WeightedLoss): |
|
|
|
r"""This criterion combines :func:`nn.LogSoftmax` and :func:`nn.NLLLoss` in one single class. |
|
|
It is useful when training a classification problem with `C` classes. |
|
|
If provided, the optional argument :attr:`weight` should be a 1D `Tensor` |
|
|
assigning weight to each of the classes. |
|
|
This is particularly useful when you have an unbalanced training set. |
|
|
The `input` is expected to contain raw, unnormalized scores for each class. |
|
|
`input` has to be a Tensor of size either :math:`(minibatch, C)` or |
|
|
:math:`(minibatch, C, d_1, d_2, ..., d_K)` |
|
|
with :math:`K \geq 1` for the `K`-dimensional case (described later). |
|
|
This criterion expects a class index in the range :math:`[0, C-1]` as the |
|
|
`target` for each value of a 1D tensor of size `minibatch`; if `ignore_index` |
|
|
is specified, this criterion also accepts this class index (this index may not |
|
|
necessarily be in the class range). |
|
|
The loss can be described as: |
|
|
.. math:: |
|
|
\text{loss}(x, class) = -\log\left(\frac{\exp(x[class])}{\sum_j \exp(x[j])}\right) |
|
|
= -x[class] + \log\left(\sum_j \exp(x[j])\right) |
|
|
or in the case of the :attr:`weight` argument being specified: |
|
|
.. math:: |
|
|
\text{loss}(x, class) = weight[class] \left(-x[class] + \log\left(\sum_j \exp(x[j])\right)\right) |
|
|
The losses are averaged across observations for each minibatch. |
|
|
Can also be used for higher dimension inputs, such as 2D images, by providing |
|
|
an input of size :math:`(minibatch, C, d_1, d_2, ..., d_K)` with :math:`K \geq 1`, |
|
|
where :math:`K` is the number of dimensions, and a target of appropriate shape |
|
|
(see below). |
|
|
Args: |
|
|
weight (Tensor, optional): a manual rescaling weight given to each class. |
|
|
If given, has to be a Tensor of size `C` |
|
|
size_average (bool, optional): Deprecated (see :attr:`reduction`). By default, |
|
|
the losses are averaged over each loss element in the batch. Note that for |
|
|
some losses, there are multiple elements per sample. If the field :attr:`size_average` |
|
|
is set to ``False``, the losses are instead summed for each minibatch. Ignored |
|
|
when reduce is ``False``. Default: ``True`` |
|
|
ignore_index (int, optional): Specifies a target value that is ignored |
|
|
and does not contribute to the input gradient. When :attr:`size_average` is |
|
|
``True``, the loss is averaged over non-ignored targets. |
|
|
reduce (bool, optional): Deprecated (see :attr:`reduction`). By default, the |
|
|
losses are averaged or summed over observations for each minibatch depending |
|
|
on :attr:`size_average`. When :attr:`reduce` is ``False``, returns a loss per |
|
|
batch element instead and ignores :attr:`size_average`. Default: ``True`` |
|
|
reduction (string, optional): Specifies the reduction to apply to the output: |
|
|
``'none'`` | ``'mean'`` | ``'sum'``. ``'none'``: no reduction will be applied, |
|
|
``'mean'``: the sum of the output will be divided by the number of |
|
|
elements in the output, ``'sum'``: the output will be summed. Note: :attr:`size_average` |
|
|
and :attr:`reduce` are in the process of being deprecated, and in the meantime, |
|
|
specifying either of those two args will override :attr:`reduction`. Default: ``'mean'`` |
|
|
Shape: |
|
|
- Input: :math:`(N, C)` where `C = number of classes`, or |
|
|
:math:`(N, C, d_1, d_2, ..., d_K)` with :math:`K \geq 1` |
|
|
in the case of `K`-dimensional loss. |
|
|
- Target: :math:`(N)` where each value is :math:`0 \leq \text{targets}[i] \leq C-1`, or |
|
|
:math:`(N, d_1, d_2, ..., d_K)` with :math:`K \geq 1` in the case of |
|
|
K-dimensional loss. |
|
|
- Output: scalar. |
|
|
If :attr:`reduction` is ``'none'``, then the same size as the target: |
|
|
:math:`(N)`, or |
|
|
:math:`(N, d_1, d_2, ..., d_K)` with :math:`K \geq 1` in the case |
|
|
of K-dimensional loss. |
|
|
Examples:: |
|
|
>>> loss = nn.CrossEntropyLoss() |
|
|
>>> input = torch.randn(3, 5, requires_grad=True) |
|
|
>>> target = torch.empty(3, dtype=torch.long).random_(5) |
|
|
>>> output = loss(input, target) |
|
|
>>> output.backward() |
|
|
""" |
|
|
__constants__ = ['weight', 'ignore_index', 'reduction'] |
|
|
def __init__(self, weight=None, size_average=None, ignore_index=-100, |
|
|
reduce=None, reduction='mean'): |
|
|
super(CrossEntropyLoss, self).__init__(weight, size_average, reduce, reduction) |
|
|
self.ignore_index = ignore_index |
|
|
def forward(self, input, target): |
|
|
return F.cross_entropy(input, target, weight=self.weight, |
|
|
ignore_index=self.ignore_index, reduction=self.reduction) |
来自
[loss]Triphard loss优雅的写法
之前一直自己手写各种triphard,triplet损失函数, 写的比较暴力,然后今天一个学长给我在github上看了一个别人的triphard的写法,一开始没看懂,用的pytorch函数没怎么见过,看懂了之后, 被惊艳到了。。因此在此记录一下,以及详细注释一下
class TripletLoss(nn.Module):
def __init__(self, margin=0.3):
super(TripletLoss, self).__init__()
self.margin = margin
self.ranking_loss = nn.MarginRankingLoss(margin=margin) # 获得一个简单的距离triplet函数
def forward(self, inputs, labels):
n = inputs.size(0) # 获取batch_size
# Compute pairwise distance, replace by the official when merged
# 每个数平方后, 进行加和(通过keepdim保持2维),再扩展成nxn维
dist = torch.pow(inputs, 2).sum(dim=1, keepdim=True).expand(n, n)
dist = dist + dist.t() # 这样每个dis[i][j]代表的是第i个特征与第j个特征的平方的和
# 然后减去2倍的 第i个特征*第j个特征 从而通过完全平方式得到 (a-b)^2
dist.addmm_(1, -2, inputs, inputs.t())
dist = dist.clamp(min=1e-12).sqrt()# 然后开方
# For each anchor, find the hardest positive and negative
# 这里dist[i][j] = 1代表i和j的label相同, =0代表i和j的label不相同
mask = labels.expand(n, n).eq(labels.expand(n, n).t())
dist_ap, dist_an = [], []
for i in range(n):
dist_ap.append(dist[i][mask[i]].max().unsqueeze(0)) # 在i与所有有相同label的j的距离中找一个最大的
dist_an.append(dist[i][mask[i] == 0].min().unsqueeze(0)) # 在i与所有不同label的j的距离找一个最小的
dist_ap = torch.cat(dist_ap) # 将list里的tensor拼接成新的tensor
dist_an = torch.cat(dist_an)
# Compute ranking hinge loss
y = torch.ones_like(dist_an) # 声明一个与dist_an相同shape的全1tensor
loss = self.ranking_loss(dist_an, dist_ap, y)
return loss
来自
六、MGN
来自
七、加载数据
加载自己的数据集
对于torchvision.datasets中有两个不同的类,分别为DatasetFolder和ImageFolder,ImageFolder是继承自DatasetFolder。
下面我们通过源码来看一看folder文件中DatasetFolder和ImageFolder分别做了些什么
import torch.utils.data as data
from PIL import Image
import os
import os.path
def has_file_allowed_extension(filename, extensions): //检查输入是否是规定的扩展名
"""Checks if a file is an allowed extension.
Args:
filename (string): path to a file
Returns:
bool: True if the filename ends with a known image extension
"""
filename_lower = filename.lower()
return any(filename_lower.endswith(ext) for ext in extensions)
def find_classes(dir):
classes = [d for d in os.listdir(dir) if os.path.isdir(os.path.join(dir, d))] //获取root目录下所有的文件夹名称
classes.sort()
class_to_idx = {classes[i]: i for i in range(len(classes))} //生成类别名称与类别id的对应Dictionary
return classes, class_to_idx
def make_dataset(dir, class_to_idx, extensions):
images = []
dir = os.path.expanduser(dir)// 将~和~user转化为用户目录,对参数中出现~进行处理
for target in sorted(os.listdir(dir)):
d = os.path.join(dir, target)
if not os.path.isdir(d):
continue
for root, _, fnames in sorted(os.walk(d)): //os.work包含三个部分,root代表该目录路径 _代表该路径下的文件夹名称集合,fnames代表该路径下的文件名称集合
for fname in sorted(fnames):
if has_file_allowed_extension(fname, extensions):
path = os.path.join(root, fname)
item = (path, class_to_idx[target])
images.append(item) //生成(训练样本图像目录,训练样本所属类别)的元组
return images //返回上述元组的列表
class DatasetFolder(data.Dataset):
"""A generic data loader where the samples are arranged in this way: ::
root/class_x/xxx.ext
root/class_x/xxy.ext
root/class_x/xxz.ext
root/class_y/123.ext
root/class_y/nsdf3.ext
root/class_y/asd932_.ext
Args:
root (string): Root directory path.
loader (callable): A function to load a sample given its path.
extensions (list[string]): A list of allowed extensions.
transform (callable, optional): A function/transform that takes in
a sample and returns a transformed version.
E.g, ``transforms.RandomCrop`` for images.
target_transform (callable, optional): A function/transform that takes
in the target and transforms it.
Attributes:
classes (list): List of the class names.
class_to_idx (dict): Dict with items (class_name, class_index).
samples (list): List of (sample path, class_index) tuples
"""
def __init__(self, root, loader, extensions, transform=None, target_transform=None):
classes, class_to_idx = find_classes(root)
samples = make_dataset(root, class_to_idx, extensions)
if len(samples) == 0:
raise(RuntimeError("Found 0 files in subfolders of: " + root + "\n"
"Supported extensions are: " + ",".join(extensions)))
self.root = root
self.loader = loader
self.extensions = extensions
self.classes = classes
self.class_to_idx = class_to_idx
self.samples = samples
self.transform = transform
self.target_transform = target_transform
def __getitem__(self, index):
"""
根据index获取sample 返回值为(sample,target)元组,同时如果该类输入参数中有transform和target_transform,torchvision.transforms类型的参数时,将获取的元组分别执行transform和target_transform中的数据转换方法。
Args:
index (int): Index
Returns:
tuple: (sample, target) where target is class_index of the target class.
"""
path, target = self.samples[index]
sample = self.loader(path)
if self.transform is not None:
sample = self.transform(sample)
if self.target_transform is not None:
target = self.target_transform(target)
return sample, target
def __len__(self):
return len(self.samples)
def __repr__(self): //定义输出对象格式 其中和__str__的区别是__repr__无论是print输出还是直接输出对象自身 都是以定义的格式进行输出,而__str__ 只有在print输出的时候会是以定义的格式进行输出
fmt_str = 'Dataset ' + self.__class__.__name__ + '\n'
fmt_str += ' Number of datapoints: {}\n'.format(self.__len__())
fmt_str += ' Root Location: {}\n'.format(self.root)
tmp = ' Transforms (if any): '
fmt_str += '{0}{1}\n'.format(tmp, self.transform.__repr__().replace('\n', '\n' + ' ' * len(tmp)))
tmp = ' Target Transforms (if any): '
fmt_str += '{0}{1}'.format(tmp, self.target_transform.__repr__().replace('\n', '\n' + ' ' * len(tmp)))
return fmt_str
IMG_EXTENSIONS = ['.jpg', '.jpeg', '.png', '.ppm', '.bmp', '.pgm', '.tif']
def pil_loader(path):
# open path as file to avoid ResourceWarning (https://github.com/python-pillow/Pillow/issues/835)
with open(path, 'rb') as f:
img = Image.open(f)
return img.convert('RGB')
def accimage_loader(path):
import accimage
try:
return accimage.Image(path)
except IOError:
# Potentially a decoding problem, fall back to PIL.Image
return pil_loader(path)
def default_loader(path):
from torchvision import get_image_backend
if get_image_backend() == 'accimage':
return accimage_loader(path)
else:
return pil_loader(path)
class ImageFolder(DatasetFolder):
"""A generic data loader where the images are arranged in this way: ::
root/dog/xxx.png
root/dog/xxy.png
root/dog/xxz.png
root/cat/123.png
root/cat/nsdf3.png
root/cat/asd932_.png
Args:
root (string): Root directory path.
transform (callable, optional): A function/transform that takes in an PIL image
and returns a transformed version. E.g, ``transforms.RandomCrop``
target_transform (callable, optional): A function/transform that takes in the
target and transforms it.
loader (callable, optional): A function to load an image given its path.
Attributes:
classes (list): List of the class names.
class_to_idx (dict): Dict with items (class_name, class_index).
imgs (list): List of (image path, class_index) tuples
"""
def __init__(self, root, transform=None, target_transform=None,
loader=default_loader):
super(ImageFolder, self).__init__(root, loader, IMG_EXTENSIONS,
transform=transform,
target_transform=target_transform)
self.imgs = self.samples
如果自己所要加载的数据组织形式如下
root/dog/xxx.png
root/dog/xxy.png
root/dog/xxz.png
root/cat/123.png
root/cat/nsdf3.png
root/cat/asd932_.png
即不同类别的训练数据分别存储在不同的文件夹中,这些文件夹都在root(即形如 D:/animals 或者 /usr/animals )路径下
class torchvision.datasets.ImageFolder(root, transform=None, target_transform=None, loader=
参数如下:
root (string) – Root directory path.
transform (callable, optional) – A function/transform that takes in an PIL image and returns a transformed version. E.g, transforms.RandomCrop
target_transform (callable, optional) – A function/transform that takes in the target and transforms it.
loader – A function to load an image given its path. 就是上述源码中
__getitem__(index)
Parameters: index (int) – Index
Returns: (sample, target) where target is class_index of the target class.
Return type: tuple
可以通过torchvision.datasets.ImageFolder进行加载
img_data = torchvision.datasets.ImageFolder('D:/bnu/database/flower',
transform=transforms.Compose([
transforms.Scale(256),
transforms.CenterCrop(224),
transforms.ToTensor()])
)
print(len(img_data))
data_loader = torch.utils.data.DataLoader(img_data, batch_size=20,shuffle=True)
print(len(data_loader))
对于所有的训练样本都在一个文件夹中 同时有一个对应的txt文件每一行分别是对应图像的路径以及其所属的类别,可以参照上述class写出对应的加载类
def default_loader(path):
return Image.open(path).convert('RGB')
class MyDataset(Dataset):
def __init__(self, txt, transform=None, target_transform=None, loader=default_loader):
fh = open(txt, 'r')
imgs = []
for line in fh:
line = line.strip('\n')
line = line.rstrip()
words = line.split()
imgs.append((words[0],int(words[1])))
self.imgs = imgs
self.transform = transform
self.target_transform = target_transform
self.loader = loader
def __getitem__(self, index):
fn, label = self.imgs[index]
img = self.loader(fn)
if self.transform is not None:
img = self.transform(img)
return img,label
def __len__(self):
return len(self.imgs)
train_data=MyDataset(txt='mnist_test.txt', transform=transforms.ToTensor())
data_loader = DataLoader(train_data, batch_size=100,shuffle=True)
print(len(data_loader))
DataLoader解析
位于torch.util.data.DataLoader中 源代码
该接口的主要目的是将pytorch中已有的数据接口如torchvision.datasets.ImageFolder,或者自定义的数据读取接口转化按照batch_size的大小封装为Tensor,即相当于在内置数据接口或者自定义数据接口的基础上增加一维,大小为batch_size的大小,得到的数据在之后可以通过封装为Variable,作为模型的输出
_ _ init _ _中所需的参数如下
1. dataset torch.utils.data.Dataset类的子类,可以是torchvision.datasets.ImageFolder等内置类,也可是继承了torch.utils.data.Dataset的自定义类
2. batch_size 每一个batch中包含的样本个数,默认是1
3. shuffle 一般在训练集中采用,默认是false,设置为true则每一个epoch都会将训练样本打乱
4. sampler 训练样本选取策略,和shuffle是互斥的 如果 shuffle为true,该参数一定要为None
5. batch_sampler BatchSampler 一次产生一个 batch 的 indices,和sampler以及shuffle互斥,一般使用默认的即可
上述Sampler的源代码地址如下[源代码](https://github.com/pytorch/pytorch/blob/master/torch/utils/data/sampler.py)
6. num_workers 用于数据加载的线程数量 默认为0 即只有主线程用来加载数据
7. collate_fn 用来聚合数据生成mini_batch
使用的时候一般为如下使用方法:
train_data=torch.utils.data.DataLoader(...)
for i, (input, target) in enumerate(train_data):
...
循环取DataLoader中的数据会触发类中_ _ iter __方法,查看源代码可知 其中调用的方法为 return _DataLoaderIter(self),因此需要查看 DataLoaderIter 这一内部类
class DataLoaderIter(object):
"Iterates once over the DataLoader's dataset, as specified by the sampler"
def __init__(self, loader):
self.dataset = loader.dataset
self.collate_fn = loader.collate_fn
self.batch_sampler = loader.batch_sampler
self.num_workers = loader.num_workers
self.pin_memory = loader.pin_memory and torch.cuda.is_available()
self.timeout = loader.timeout
self.done_event = threading.Event()
self.sample_iter = iter(self.batch_sampler)
if self.num_workers > 0:
self.worker_init_fn = loader.worker_init_fn
self.index_queue = multiprocessing.SimpleQueue()
self.worker_result_queue = multiprocessing.SimpleQueue()
self.batches_outstanding = 0
self.worker_pids_set = False
self.shutdown = False
self.send_idx = 0
self.rcvd_idx = 0
self.reorder_dict = {}
base_seed = torch.LongTensor(1).random_()[0]
self.workers = [
multiprocessing.Process(
target=_worker_loop,
args=(self.dataset, self.index_queue, self.worker_result_queue, self.collate_fn,
base_seed + i, self.worker_init_fn, i))
for i in range(self.num_workers)]
if self.pin_memory or self.timeout > 0:
self.data_queue = queue.Queue()
self.worker_manager_thread = threading.Thread(
target=_worker_manager_loop,
args=(self.worker_result_queue, self.data_queue, self.done_event, self.pin_memory,
torch.cuda.current_device()))
self.worker_manager_thread.daemon = True
self.worker_manager_thread.start()
else:
self.data_queue = self.worker_result_queue
for w in self.workers:
w.daemon = True # ensure that the worker exits on process exit
w.start()
_update_worker_pids(id(self), tuple(w.pid for w in self.workers))
_set_SIGCHLD_handler()
self.worker_pids_set = True
# prime the prefetch loop
for _ in range(2 * self.num_workers):
self._put_indices()
来自
八、基础
1.2 在_init_()里开头的那一句
super(Net, self).__init__()
这句的意思是_init_()函数继承自父类nn.Module
super()函数是用于调用父类的一个方法, super(Net, self)首先找到Net的父类(就是nn.Module), 然后把类Net的对象转换为类nn.Module的对象, 具体的可以看一下
http://www.runoob.com/python/python-func-super.html
Python super() 函数
Python 内置函数
描述
super() 函数是用于调用父类(超类)的一个方法。
super 是用来解决多重继承问题的,直接用类名调用父类方法在使用单继承的时候没问题,但是如果使用多继承,会涉及到查找顺序(MRO)、重复调用(钻石继承)等种种问题。
MRO 就是类的方法解析顺序表, 其实也就是继承父类方法时的顺序表。
语法
以下是 super() 方法的语法:
super(type[, object-or-type])
参数
Python3.x 和 Python2.x 的一个区别是: Python 3 可以使用直接使用 super().xxx 代替 super(Class, self).xxx :
Python3.x 实例:
实例
class A:
def add(self, x):
y = x+1
print(y)
class B(A):
def add(self, x):
super().add(x)
b = B()
b.add(2) # 3
Python2.x 实例:
实例
#!/usr/bin/python # -*- coding: UTF-8 -*- class A(object): # Python2.x 记得继承 object def add(self, x): y = x+1 print(y) class B(A): def add(self, x): super(B, self).add(x) b = B() b.add(2) # 3
返回值
无。
实例
以下展示了使用 super 函数的实例:
实例
#!/usr/bin/python # -*- coding: UTF-8 -*- class FooParent(object): def __init__(self): self.parent = 'I\'m the parent.' print ('Parent') def bar(self,message): print ("%s from Parent" % message) class FooChild(FooParent): def __init__(self): # super(FooChild,self) 首先找到 FooChild 的父类(就是类 FooParent),然后把类 FooChild 的对象转换为类 FooParent 的对象 super(FooChild,self).__init__() print ('Child') def bar(self,message): super(FooChild, self).bar(message) print ('Child bar fuction') print (self.parent) if __name__ == '__main__': fooChild = FooChild() fooChild.bar('HelloWorld')
执行结果:
Parent
Child
HelloWorld from Parent
Child bar fuction
I'm the parent.
我们在学习 Python 类的时候,总会碰见书上的类中有 __init__() 这样一个函数,很多同学百思不得其解,其实它就是 Python 的构造方法。
构造方法类似于类似 init() 这种初始化方法,来初始化新创建对象的状态,在一个对象呗创建以后会立即调用,比如像实例化一个类:
f = FooBar()
f.init()
使用构造方法就能让它简化成如下形式:
f = FooBar()
你可能还没理解到底什么是构造方法,什么是初始化,下面我们再来举个例子:
class FooBar:
def __init__(self):
self.somevar = 42
>>>f = FooBar()
>>>f.somevar
我们会发现在初始化 FooBar 中的 somevar 的值为 42 之后,实例化直接就能够调用 somevar 的值;如果说你没有用构造方法初始化值得话,就不能够调用,明白了吗?
在明白了构造方法之后,我们来点进阶的问题,那就是构造方法中的初始值无法继承的问题。
例子:
class Bird:
def __init__(self):
self.hungry = True
def eat(self):
if self.hungry:
print 'Ahahahah'
else:
print 'No thanks!'
class SongBird(Bird):
def __init__(self):
self.sound = 'Squawk'
def sing(self):
print self.song()
sb = SongBird()
sb.sing() # 能正常输出
sb.eat() # 报错,因为 songgird 中没有 hungry 特性
那解决这个问题的办法有两种:
1、调用未绑定的超类构造方法(多用于旧版 python 阵营)
class SongBird(Bird):
def __init__(self):
Bird.__init__(self)
self.sound = 'Squawk'
def sing(self):
print self.song()
原理:在调用了一个实例的方法时,该方法的self参数会自动绑定到实例上(称为绑定方法);如果直接调用类的方法(比如Bird.__init__),那么就没有实例会被绑定,可以自由提供需要的self参数(未绑定方法)。
2、使用super函数(只在新式类中有用)
class SongBird(Bird):
def __init__(self):
super(SongBird,self).__init__()
self.sound = 'Squawk'
def sing(self):
print self.song()
原理:它会查找所有的超类,以及超类的超类,直到找到所需的特性为止。
1.4 torch.nn.functional as F
这个是通常写法, 我们用到的激活函数, pool函数都在这个F里面(损失函数还有conv/fc等层在nn里面), 这个要注意一下, 那BN/dropout是在nn还是在F里面?
2. 如何开始训练
1中是把网络定义好了, 那离能够训练这个网络还有几步呢?我们需要想一下训练一个神经网络需要一些什么基本的步骤
2.1 输入值格式
我们的应用都是图片输入, 那pytorch有没有keras那种直接一个文件夹输入作为训练集或测试集(ImageDataGenerator())的那种方法呢?是有的, 就是Dataloader()
import torchvision
import torchvision.transforms as transforms
# torchvision数据集的输出是在[0, 1]范围内的PILImage图片。
# 我们此处使用归一化的方法将其转化为Tensor,数据范围为[-1, 1]
transform=transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),
])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,
shuffle=True, num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
'''注:这一部分需要下载部分数据集 因此速度可能会有一些慢 同时你会看到这样的输出
Downloading http://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz to ./data/cifar-10-python.tar.gz
Extracting tar file
Done!
Files already downloaded and verified
'''
这段代码就是用DataLoader()来生成patch的方法, 这个和keras的ImageDataGenerator()就很像了, 生成的trainloader是一个包含tensor的迭代器, 在训练的过程中就可以直接从迭代器里去除tensor, 然后装入Variable中作为神经网络的输入, 这就是输入值格式
当然, 这只是一种简单的从数据集中得到batch的方法, 要是我们的数据是从某个文件夹来还得经过点pre-process的话(比如SR)会更复杂一些, 我们会在SR benchmark笔记里面再详细说
2.2 Optimizer
import torch.optim as optim
# create your optimizer
optimizer = optim.SGD(net.parameters(), lr = 0.01)
# in your training loop:
optimizer.zero_grad() # zero the gradient buffers
optimizer.step()
Optimizer的定义和Keras差不多, 可以用参数定义lr, momentum, weight_decay等, 这个去查文档就好, optimizer.zero_grad()的意思是初始化所有的梯度buffer为0, 这个是在每一次计算梯度更新之前做的, optimizer.step()就是根据你定义的optimizer执行梯度更新
2.3 loss function
import torch.optim as optim
# make your loss function
criterion = nn.MSELoss()
# in your training loop:
output = net(input)
loss = criterion(output, target)
loss.backward()
criterion定义了loss function, 然后在训练的loop中loss就根据criterion不停去算, loss是一个Variable, 它具有backward属性, 就是在训练过程中可以直接用.backward来计算loss对每个weight的梯度值
2.4 训练过程
有了输入, loss function和Optimizer, 我们就可以开始进行训练了, 过程就是从迭代器trainloader把input tensor送入网络, 然后算output, 根据loss function算loss, 从loss再反过去算梯度, 根据Optimizer去更新权重
下面是MGN的训练代码:
for batch, (inputs, labels) in enumerate(self.train_loader):
inputs = inputs.to(self.device)
labels = labels.to(self.device)
self.optimizer.zero_grad()#optimizer.zero_grad()的意思是初始化所有的梯度buffer为0, 这个是在每一次计算梯度更新之前做的
outputs = self.model(inputs)
loss = self.loss(outputs, labels)
loss.backward()#criterion定义了loss function, 然后在训练的loop中loss就根据criterion不停去算, loss是一个Variable, 它具有backward属性, 就是在训练过程中可以直接用.backward来计算loss对每个weight的梯度值
self.optimizer.step()#optimizer.step()就是根据你定义的optimizer执行梯度更新
*****************************************************************
for epoch in range(2): # loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs
inputs, labels = data
# wrap them in Variable
inputs, labels = Variable(inputs), Variable(labels)
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.data[0]
if i % 2000 == 1999: # print every 2000 mini-batches
print('[%d, %5d] loss: %.3f' % (epoch+1, i+1, running_loss / 2000))
running_loss = 0.0
print('Finished Training')
2.5 神经网络的快速搭建方法
除了上面提到的搭建神经网络的方法之外, pytorch还提供了另一种更快速的搭建方法, 有点类似于Keras的Sequentiao模型
http://keras-cn.readthedocs.io/en/latest/getting_started/sequential_model/
net = torch.nn.Sequential(
torch.nn.Linear(2,10),
torch.nn.ReLU,
torch.nn.Linear(10,2),
)
# fast implementation of FC 2->10->2
快速开始序贯(Sequential)模型
序贯模型是多个网络层的线性堆叠,也就是“一条路走到黑”。
可以通过向Sequential模型传递一个layer的list来构造该模型:
from keras.models import Sequential
from keras.layers import Dense, Activation
model = Sequential([
Dense(32, units=784),
Activation('relu'),
Dense(10),
Activation('softmax'),
])
也可以通过.add()方法一个个的将layer加入模型中:
model = Sequential()
model.add(Dense(32, input_shape=(784,)))
model.add(Activation('relu'))
3. 保存和提取训练结果
保存和加载网络模型有两种方法, 一种是把模型和参数一起save(相当于keras的save()), 还有一种就是只save参数(相当于keras的save_weight())
# 保存和加载整个模型
torch.save(model_object, 'model.pth')
model = torch.load('model.pth')
# 仅保存和加载模型参数
torch.save(model_object.state_dict(), 'params.pth')
model_object.load_state_dict(torch.load('params.pth'))
当网络比较大的时候, 用第一种方法会花比较多的时间, 同时所占的存储空间也比较大
还有一个问题就是存储模型的时候, 有的时候会存成.pkl格式, 应该是没有本质区别, 都是Pickle格式, 后续在用C来读取网络的时候, 也从Pickle的C实现来考虑直接解析Pytorch的模型
- 输入值格式(就是patch的格式)
- Optimizer
- loss fucntion
- 梯度更新过程
- type -- 类。
- object-or-type -- 类,一般是 self
九、PIL
在PIL库中可以实现图形的缩放,但是 如果使用下面的写法的话,会造成部分的信息丢失
img = img.resize((width, height))
但是涅,在PIL中 带ANTIALIAS滤镜缩放结果,程序如下:
img = img.resize((width, height),Image.ANTIALIAS)
这样的话就不会有信息丢失啦
---------------------
作者:sunshinefcx
来源:CSDN
原文:https://blog.csdn.net/sunshinefcx/article/details/85623227
版权声明:本文为博主原创文章,转载请附上博文链接!
创建绘画对象 ImageDraw module creates drawing surface for image
import Image, ImageDraw
im = Image.open(“vacation.jpeg")
drawSurface = ImageDraw.Draw(im)
基本绘画操作 Basic methods of drawing surface
- 弧/弦/扇形 chord arc pieslice (bbox, strtAng, endAng)
- 椭圆 ellipse (bbox)
- 线段/多段线 line (L) draw.line(((60,60),(90,60), (90,90), (60,90), (60,60))) #draw a square
- 点 point (xy) #单像素点很小看不清,实际中可用实心小圆代替
- 多边形 polygon (L) draw.polygon([(60,60), (90,60), (90,90), (60,90)]) #draw a square
- 矩形 rectangle (bbox) # first coord属于矩形, second coord不属于
- 文字 text(xy,message,font=None) 绘制文字message,文本区域左上角坐标为xy
drawable.text((10, 10), "Hello", fill=(255,0,0), font=None) - 文字大小 textsize(message,font=None) 给定文字message,返回所占像素(width,height)
可选参数 Common optional args for these methods
- fill=fillColor
- outline=outlineColor
矢量字体支持 TrueType Font support
import ImageFont
ttFont = ImageFont.truetype (“arial.ttf”, 16)
drawable.text ((10, 10), “Hello”, fill=(255,0,0), font=ttFont)
来自
9、 Rectangle
定义:draw.rectangle(box,options)
含义:绘制一个长边形。
变量box是包含2元组[(x,y),…]或者数字[x,y,…]的任何序列对象。它应该包括2个坐标值。
注意:当长方形没有没有被填充时,第二个坐标对定义了一个长方形外面的点。
变量options的fill给定长边形内部的颜色。
例子:
>>>from PIL import Image, ImageDraw
>>>im01 = Image.open("D:\\Code\\Python\\test\\img\\test01.jpg")
>>>draw = ImageDraw.Draw(im01)
>>>draw.rectangle((0,0,100,200), fill = (255,0,0))
>>> draw.rectangle([100,200,300,500],fill = (0,255,0))
>>>draw.rectangle([(300,500),(600,700)], fill = (0,0,255))
>>>im01.show()
---------------------
作者:icamera0
来源:CSDN
原文:https://blog.csdn.net/icamera0/article/details/50747084
版权声明:本文为博主原创文章,转载请附上博文链接!
from PIL import Image
img = Image.open(‘D:\image_for_test\Spee.jpg’)
print(“初始尺寸”,img.size)
print(“默认缩放NEARESET”,img.resize((128,128)).size)
print(“BILINEAR”,img.resize((127,127),Image.BILINEAR).size)
print(“BICUBIC”,img.resize((126,126),Image.BICUBIC).size)
print(“ANTIALIAS”,img.resize((125,125),Image.ANTIALIAS).size)
双线性差值,只考虑了旁边4个的点,并且是用的加权平均
双三次插值,考虑了16个点,做加权平均
抗锯齿插值,会考虑所有影响到的像素点,反正很大
---------------------
作者:luojiaao
来源:CSDN
原文:https://blog.csdn.net/m0_37789876/article/details/82596984
版权声明:本文为博主原创文章,转载请附上博文链接!
1. 函数
用 OpenCV 标注 bounding box 主要用到下面两个工具——cv2.rectangle() 和 cv2.putText()。用法如下:
# cv2.rectangle()
# 输入参数分别为图像、左上角坐标、右下角坐标、颜色数组、粗细
cv2.rectangle(img, (x,y), (x+w,y+h), (B,G,R), Thickness)
# cv2.putText()
# 输入参数为图像、文本、位置、字体、大小、颜色数组、粗细
cv2.putText(img, text, (x,y), Font, Size, (B,G,R), Thickness)
1
2
3
4
5
6
7
2. Example
import cv2
fname = '001.jpg'
img = cv2.imread(fname)
# 画矩形框
cv2.rectangle(img, (212,317), (290,436), (0,255,0), 4)
# 标注文本
font = cv2.FONT_HERSHEY_SUPLEX
text = '001'
cv2.putText(img, text, (212, 310), font, 2, (0,0,255), 1)
cv2.imwrite('001_new.jpg', img)